 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSwarm-Inspired Generation of Collective Behaviors in Graph Dynamical Systems
Jun 23, 2026Collective behavior arises when locally interacting units produce coordinated global organization, from synchronization in dynamical systems to task-relevant information flow on graphs. The central challenge is not only to explain how collective behavior emerges, but to design local interaction rules that can produce desired global organization and generalize across graphs, dynamics and tasks.To address this challenge, we introduce the Swarm-Inspired Emergent Synchronizer (SIES), a graph-dynamical framework that learns generalizable local-interaction laws for controllable collective organization. Each node is an agent-like dynamical unit with a state and task cue, and signed source-target-conditioned attention acts as an adaptive coupling term inside an explicit evolution model. Therefore, SIES combines an explicit dynamical engine with local agent intelligence, similar to biological swarms. For synchronization control, SIES learns a generalizable coupling operator that produces prescribed synchronization patterns for CDSs across untrained network scales, target phase relations, and intrinsic node dynamics without retraining. The learned operator also reaches gait-related modes faster than three oscillator baselines and generalizes synchronization-driven locomotion to simulated multi-legged robots of different scales and a physical hexapod after leg disablement. For graph representation learning, SIES applies the same signed interaction principle to message passing and achieves the highest performance among the compared methods on heterophilous node-classification benchmarks. Together, these results position SIES as a generalizable and learnable graph-dynamical interaction framework with promise for synchronization control, adaptive robot coordination, and heterophilous graph representation learning.
Hessian-informed machine learning interatomic potential towards bridging theory and experiments
Mar 26, 2026Local curvature of potential energy surfaces is critical for predicting certain experimental observables of molecules and materials from first principles, yet it remains far beyond reach for complex systems. In this work, we introduce a Hessian-informed Machine Learning Interatomic Potential (Hi-MLIP) that captures such curvature reliably, thereby enabling accurate analysis of associated thermodynamic and kinetic phenomena. To make Hessian supervision practically viable, we develop a highly efficient training protocol, termed Hessian INformed Training (HINT), achieving two to four orders of magnitude reduction for the requirement of expensive Hessian labels. HINT integrates critical techniques, including Hessian pre-training, configuration sampling, curriculum learning and stochastic projection Hessian loss. Enabled by HINT, Hi-MLIP significantly improves transition-state search and brings Gibbs free-energy predictions close to chemical accuracy especially in data-scarce regimes. Our framework also enables accurate treatment of strongly anharmonic hydrides, reproducing phonon renormalization and superconducting critical temperatures in close agreement with experiment while bypassing the computational bottleneck of anharmonic calculations. These results establish a practical route to enhancing curvature awareness of machine learning interatomic potentials, bridging simulation and experimental observables across a wide range of systems.
Face processing emerges from object-trained convolutional neural networks
May 29, 2024



Whether face processing depends on unique, domain-specific neurocognitive mechanisms or domain-general object recognition mechanisms has long been debated. Directly testing these competing hypotheses in humans has proven challenging due to extensive exposure to both faces and objects. Here, we systematically test these hypotheses by capitalizing on recent progress in convolutional neural networks (CNNs) that can be trained without face exposure (i.e., pre-trained weights). Domain-general mechanism accounts posit that face processing can emerge from a neural network without specialized pre-training on faces. Consequently, we trained CNNs solely on objects and tested their ability to recognize and represent faces as well as objects that look like faces (face pareidolia stimuli).... Due to the character limits, for more details see in attached pdf
Forward Laplacian: A New Computational Framework for Neural Network-based Variational Monte Carlo
Jul 17, 2023Neural network-based variational Monte Carlo (NN-VMC) has emerged as a promising cutting-edge technique of ab initio quantum chemistry. However, the high computational cost of existing approaches hinders their applications in realistic chemistry problems. Here, we report the development of a new NN-VMC method that achieves a remarkable speed-up by more than one order of magnitude, thereby greatly extending the applicability of NN-VMC to larger systems. Our key design is a novel computational framework named Forward Laplacian, which computes the Laplacian associated with neural networks, the bottleneck of NN-VMC, through an efficient forward propagation process. We then demonstrate that Forward Laplacian is not only versatile but also facilitates more developments of acceleration methods across various aspects, including optimization for sparse derivative matrix and efficient neural network design. Empirically, our approach enables NN-VMC to investigate a broader range of atoms, molecules and chemical reactions for the first time, providing valuable references to other ab initio methods. The results demonstrate a great potential in applying deep learning methods to solve general quantum mechanical problems.
TorchAudio: Building Blocks for Audio and Speech Processing
Oct 28, 2021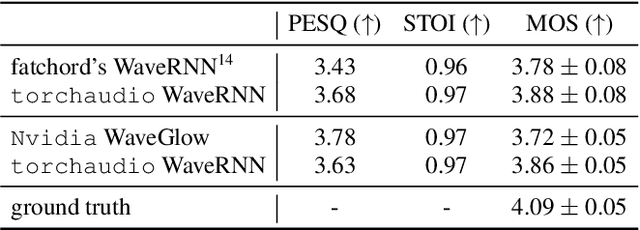
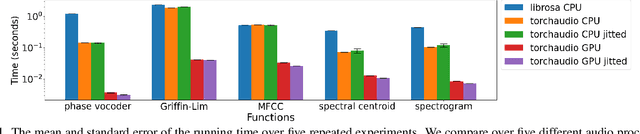
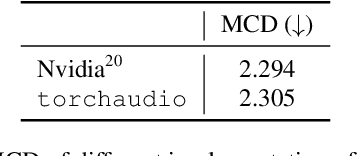
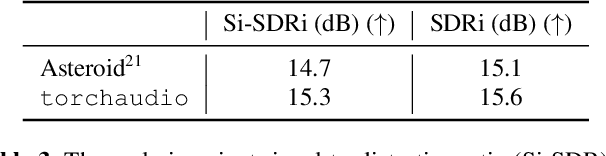
This document describes version 0.10 of torchaudio: building blocks for machine learning applications in the audio and speech processing domain. The objective of torchaudio is to accelerate the development and deployment of machine learning applications for researchers and engineers by providing off-the-shelf building blocks. The building blocks are designed to be GPU-compatible, automatically differentiable, and production-ready. torchaudio can be easily installed from Python Package Index repository and the source code is publicly available under a BSD-2-Clause License (as of September 2021) at https://github.com/pytorch/audio. In this document, we provide an overview of the design principles, functionalities, and benchmarks of torchaudio. We also benchmark our implementation of several audio and speech operations and models. We verify through the benchmarks that our implementations of various operations and models are valid and perform similarly to other publicly available implementations.
Learning Vision-based Reactive Policies for Obstacle Avoidance
Oct 30, 2020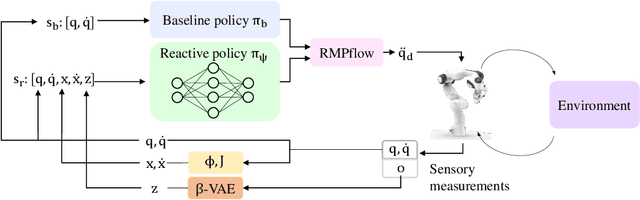
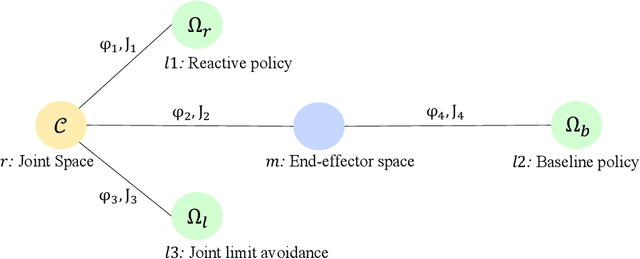
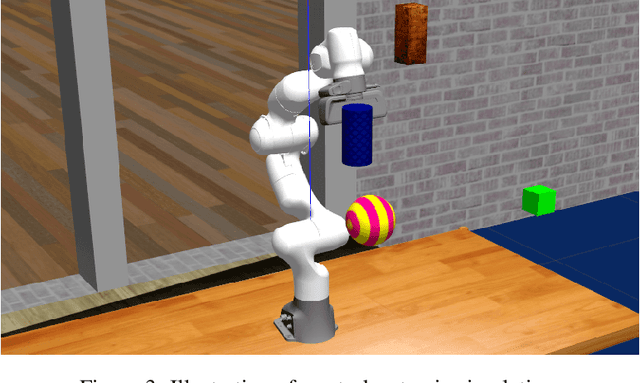
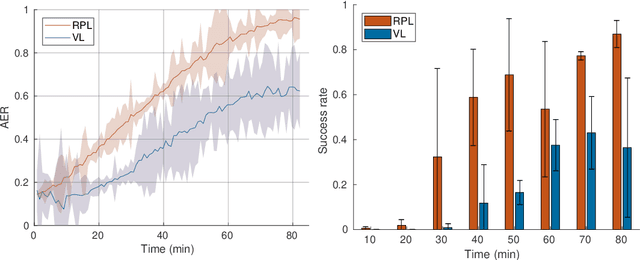
In this paper, we address the problem of vision-based obstacle avoidance for robotic manipulators. This topic poses challenges for both perception and motion generation. While most work in the field aims at improving one of those aspects, we provide a unified framework for approaching this problem. The main goal of this framework is to connect perception and motion by identifying the relationship between the visual input and the corresponding motion representation. To this end, we propose a method for learning reactive obstacle avoidance policies. We evaluate our method on goal-reaching tasks for single and multiple obstacles scenarios. We show the ability of the proposed method to efficiently learn stable obstacle avoidance strategies at a high success rate, while maintaining closed-loop responsiveness required for critical applications like human-robot interaction.
Nonconvex Matrix Completion with Linearly Parameterized Factors
Mar 29, 2020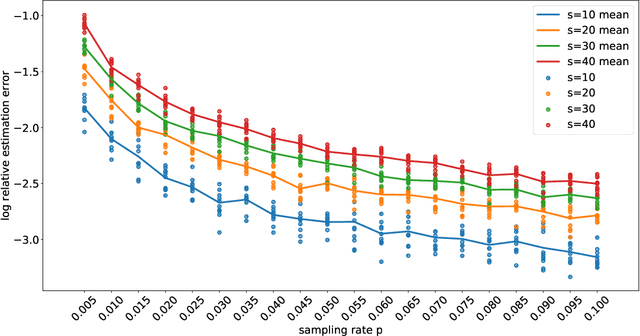
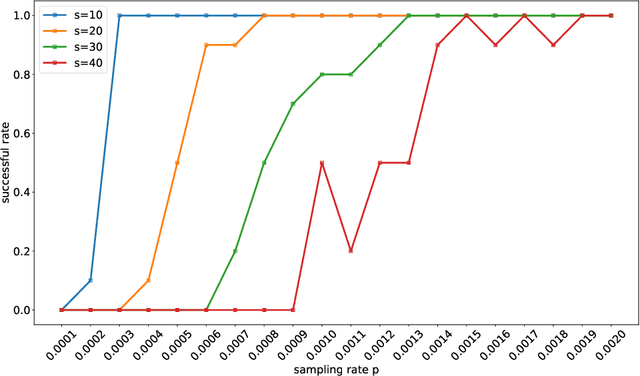
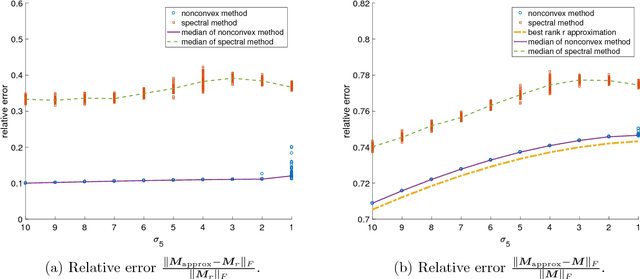
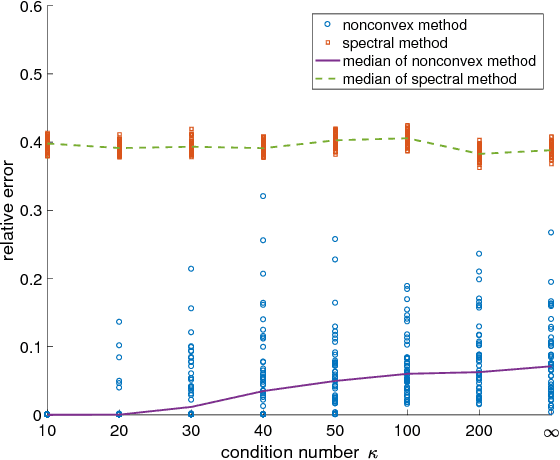
Techniques of matrix completion aim to impute a large portion of missing entries in a data matrix through a small portion of observed ones, with broad machine learning applications including collaborative filtering, pairwise ranking, etc. In practice, additional structures are usually employed in order to improve the accuracy of matrix completion. Examples include subspace constraints formed by side information in collaborative filtering, and skew symmetry in pairwise ranking. This paper performs a unified analysis of nonconvex matrix completion with linearly parameterized factorization, which covers the aforementioned examples as special cases. Importantly, uniform upper bounds for estimation errors are established for all local minima, provided that the sampling rate satisfies certain conditions determined by the rank, condition number, and incoherence parameter of the ground-truth low rank matrix. Empirical efficiency of the proposed method is further illustrated by numerical simulations.
Nonconvex Rectangular Matrix Completion via Gradient Descent without $\ell_{2,\infty}$ Regularization
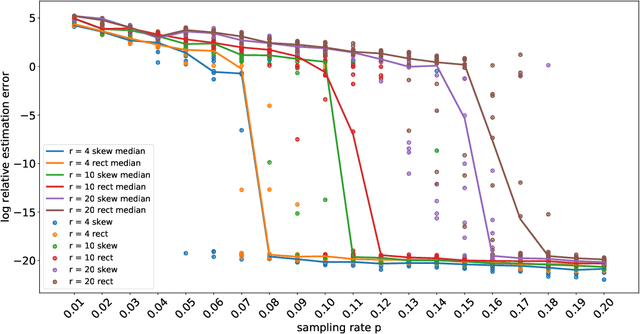
Jan 18, 2019The analysis of nonconvex matrix completion has recently attracted much attention in the community of machine learning thanks to its computational convenience. Existing analysis on this problem, however, usually relies on $\ell_{2,\infty}$ projection or regularization that involves unknown model parameters, although they are observed to be unnecessary in numerical simulations, see, e.g. Zheng and Lafferty [2016]. In this paper, we extend the analysis of the vanilla gradient descent for positive semidefinite matrix completion proposed in Ma et al. [2017] to the rectangular case, and more significantly, improve the required sampling complexity from $\widetilde{O}(r^3)$ to $\widetilde{O}(r^2)$. Our technical ideas and contributions are potentially useful in improving the leave-one-out analysis in other related problems.
Leveraging Elastic Demand for Forecasting
Sep 09, 2018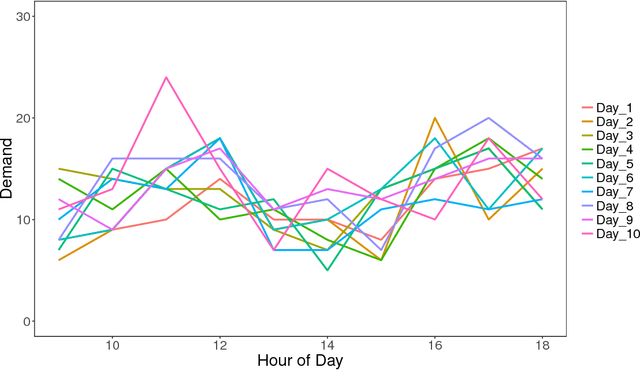


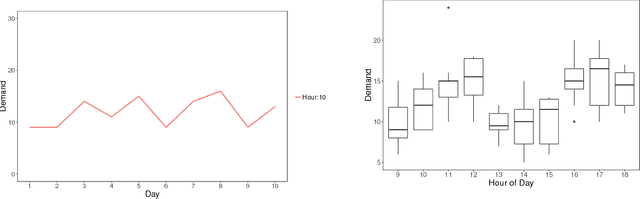
Demand variance can result in a mismatch between planned supply and actual demand. Demand shaping strategies such as pricing can be used to shift elastic demand to reduce the imbalance. In this work, we propose to consider elastic demand in the forecasting phase. We present a method to reallocate the historical elastic demand to reduce variance, thus making forecasting and supply planning more effective.
Memory-efficient Kernel PCA via Partial Matrix Sampling and Nonconvex Optimization: a Model-free Analysis of Local Minima
Dec 26, 2017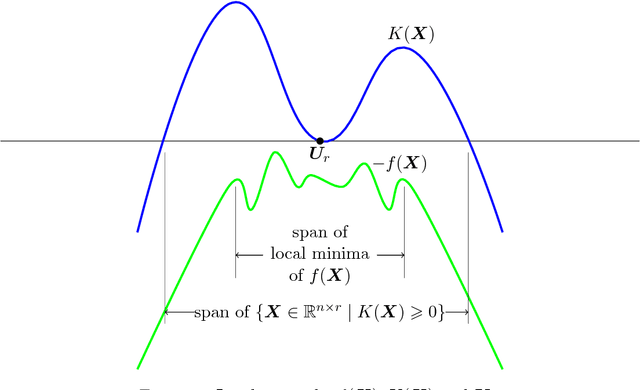
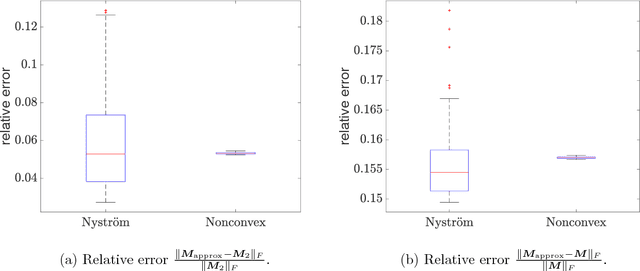
Kernel PCA is a widely used nonlinear dimension reduction technique in machine learning, but storing the kernel matrix is notoriously challenging when the sample size is large. Inspired by Yi et al. [2016], where the idea of partial matrix sampling followed by nonconvex optimization is proposed for matrix completion and robust PCA, we apply a similar approach to memory-efficient Kernel PCA. In theory, with no assumptions on the kernel matrix in terms of eigenvalues or eigenvectors, we established a model-free theory for the low-rank approximation based on any local minimum of the proposed objective function. As interesting byproducts, when the underlying positive semidefinite matrix is assumed to be low-rank and highly structured, corollaries of our main theorem improve the state-of-the-art results of Ge et al. [2016, 2017] for nonconvex matrix completion with no spurious local minima. Numerical experiments also show that our approach is competitive in terms of approximation accuracy compared to the well-known Nystr\"{o}m algorithm for Kernel PCA.