 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Trust-Region Interior-Point Stochastic Sequential Quadratic Programming Method
Mar 10, 2026In this paper, we propose a trust-region interior-point stochastic sequential quadratic programming (TR-IP-SSQP) method for solving optimization problems with a stochastic objective and deterministic nonlinear equality and inequality constraints. In this setting, exact evaluations of the objective function and its gradient are unavailable, but their stochastic estimates can be constructed. In particular, at each iteration our method builds stochastic oracles, which estimate the objective value and gradient to satisfy proper adaptive accuracy conditions with a fixed probability. To handle inequality constraints, we adopt an interior-point method (IPM), in which the barrier parameter follows a prescribed decaying sequence. Under standard assumptions, we establish global almost-sure convergence of the proposed method to first-order stationary points. We implement the method on a subset of problems from the CUTEst test set, as well as on logistic regression problems, to demonstrate its practical performance.
Why is Normalization Preferred? A Worst-Case Complexity Theory for Stochastically Preconditioned SGD under Heavy-Tailed Noise
Feb 13, 2026We develop a worst-case complexity theory for stochastically preconditioned stochastic gradient descent (SPSGD) and its accelerated variants under heavy-tailed noise, a setting that encompasses widely used adaptive methods such as Adam, RMSProp, and Shampoo. We assume the stochastic gradient noise has a finite $p$-th moment for some $p \in (1,2]$, and measure convergence after $T$ iterations. While clipping and normalization are parallel tools for stabilizing training of SGD under heavy-tailed noise, there is a fundamental separation in their worst-case properties in stochastically preconditioned settings. We demonstrate that normalization guarantees convergence to a first-order stationary point at rate $\mathcal{O}(T^{-\frac{p-1}{3p-2}})$ when problem parameters are known, and $\mathcal{O}(T^{-\frac{p-1}{2p}})$ when problem parameters are unknown, matching the optimal rates for normalized SGD, respectively. In contrast, we prove that clipping may fail to converge in the worst case due to the statistical dependence between the stochastic preconditioner and the gradient estimates. To enable the analysis, we develop a novel vector-valued Burkholder-type inequality that may be of independent interest. These results provide a theoretical explanation for the empirical preference for normalization over clipping in large-scale model training.
3DGS$^2$-TR: Scalable Second-Order Trust-Region Method for 3D Gaussian Splatting
Jan 30, 2026We propose 3DGS$^2$-TR,a second-order optimizer for accelerating the scene training problem in 3D Gaussian Splatting (3DGS). Unlike existing second-order approaches that rely on explicit or dense curvature representations, such as 3DGS-LM (Höllein et al., 2025) or 3DGS2 (Lan et al., 2025), our method approximates curvature using only the diagonal of the Hessian matrix, efficiently via Hutchinson's method. Our approach is fully matrix-free and has the same complexity as ADAM (Kingma, 2024), $O(n)$ in both computation and memory costs. To ensure stable optimization in the presence of strong nonlinearity in the 3DGS rasterization process, we introduce a parameter-wise trust-region technique based on the squared Hellinger distance, regularizing updates to Gaussian parameters. Under identical parameter initialization and without densification, 3DGS$^2$-TR is able to achieve better reconstruction quality on standard datasets, using 50% fewer training iterations compared to ADAM, while incurring less than 1GB of peak GPU memory overhead (17% more than ADAM and 85% less than 3DGS-LM), enabling scalability to very large scenes and potentially to distributed training settings.
Computron: Serving Distributed Deep Learning Models with Model Parallel Swapping
Jun 24, 2023



Many of the most performant deep learning models today in fields like language and image understanding are fine-tuned models that contain billions of parameters. In anticipation of workloads that involve serving many of such large models to handle different tasks, we develop Computron, a system that uses memory swapping to serve multiple distributed models on a shared GPU cluster. Computron implements a model parallel swapping design that takes advantage of the aggregate CPU-GPU link bandwidth of a cluster to speed up model parameter transfers. This design makes swapping large models feasible and can improve resource utilization. We demonstrate that Computron successfully parallelizes model swapping on multiple GPUs, and we test it on randomized workloads to show how it can tolerate real world variability factors like burstiness and skewed request rates. Computron's source code is available at https://github.com/dlzou/computron.
Distributed-Memory Sparse Kernels for Machine Learning
Mar 18, 2022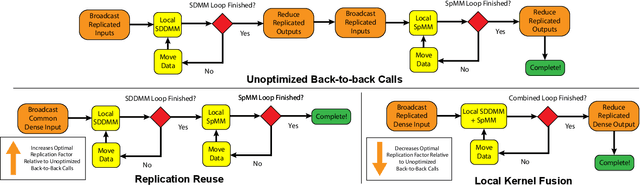
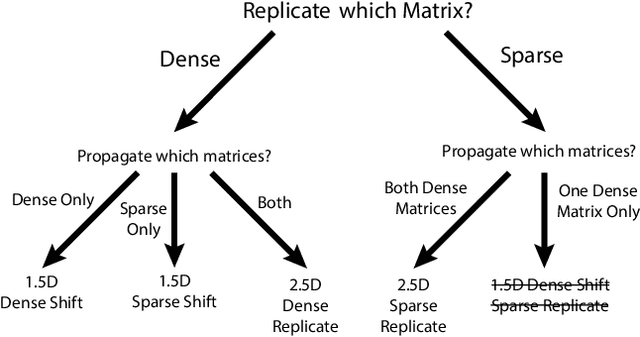
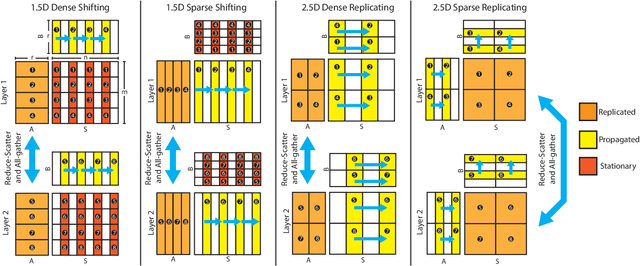
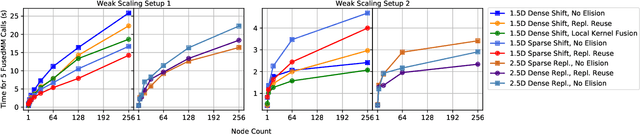
Sampled Dense Times Dense Matrix Multiplication (SDDMM) and Sparse Times Dense Matrix Multiplication (SpMM) appear in diverse settings, such as collaborative filtering, document clustering, and graph embedding. Frequently, the SDDMM output becomes the input sparse matrix for a subsequent SpMM operation. Existing work has focused on shared memory parallelization of these primitives. While there has been extensive analysis of communication-minimizing distributed 1.5D algorithms for SpMM, no such analysis exists for SDDMM or the back-to-back sequence of SDDMM and SpMM, termed FusedMM. We show that distributed memory 1.5D and 2.5D algorithms for SpMM can be converted to algorithms for SDDMM with identical communication costs and input / output data layouts. Further, we give two communication-eliding strategies to reduce costs further for FusedMM kernels: either reusing the replication of an input dense matrix for the SDDMM and SpMM in sequence, or fusing the local SDDMM and SpMM kernels. We benchmark FusedMM algorithms on Cori, a Cray XC40 at LBNL, using Erdos-Renyi random matrices and large real-world sparse matrices. On 256 nodes with 68 cores each, 1.5D FusedMM algorithms using either communication eliding approach can save at least 30% of time spent exclusively in communication compared to executing a distributed-memory SpMM and SDDMM kernel in sequence. On real-world matrices with hundreds of millions of edges, all of our algorithms exhibit at least a 10x speedup over the SpMM algorithm in PETSc. On these matrices, our communication-eliding techniques exhibit runtimes up to 1.6 times faster than an unoptimized sequence of SDDMM and SpMM. We embed and test the scaling of our algorithms in real-world applications, including collaborative filtering via alternating-least-squares and inference for attention-based graph neural networks.
CoSA: Scheduling by Constrained Optimization for Spatial Accelerators
May 05, 2021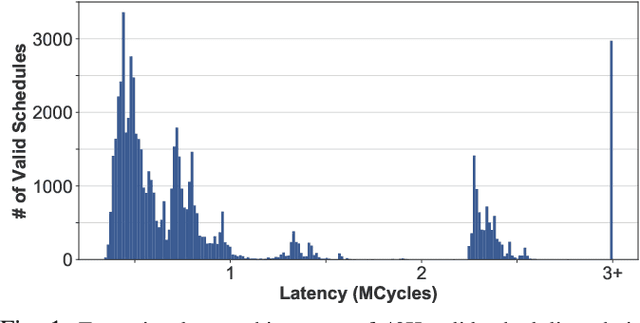
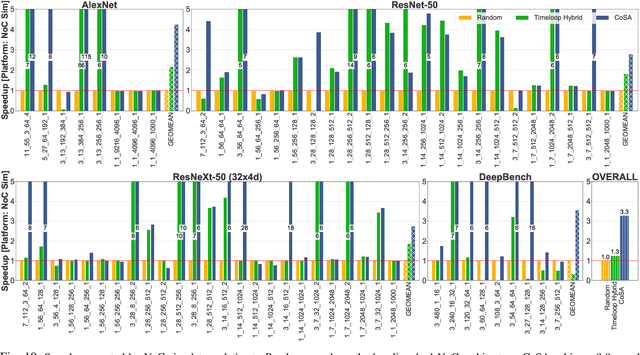
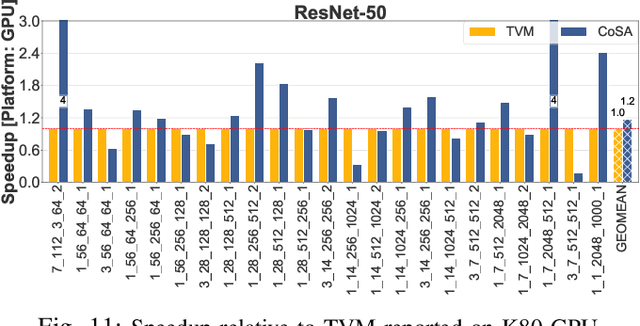
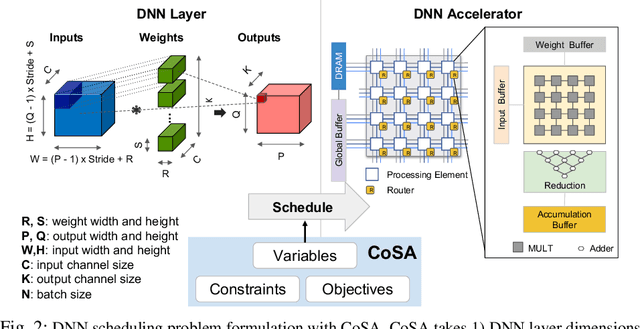
Recent advances in Deep Neural Networks (DNNs) have led to active development of specialized DNN accelerators, many of which feature a large number of processing elements laid out spatially, together with a multi-level memory hierarchy and flexible interconnect. While DNN accelerators can take advantage of data reuse and achieve high peak throughput, they also expose a large number of runtime parameters to the programmers who need to explicitly manage how computation is scheduled both spatially and temporally. In fact, different scheduling choices can lead to wide variations in performance and efficiency, motivating the need for a fast and efficient search strategy to navigate the vast scheduling space. To address this challenge, we present CoSA, a constrained-optimization-based approach for scheduling DNN accelerators. As opposed to existing approaches that either rely on designers' heuristics or iterative methods to navigate the search space, CoSA expresses scheduling decisions as a constrained-optimization problem that can be deterministically solved using mathematical optimization techniques. Specifically, CoSA leverages the regularities in DNN operators and hardware to formulate the DNN scheduling space into a mixed-integer programming (MIP) problem with algorithmic and architectural constraints, which can be solved to automatically generate a highly efficient schedule in one shot. We demonstrate that CoSA-generated schedules significantly outperform state-of-the-art approaches by a geometric mean of up to 2.5x across a wide range of DNN networks while improving the time-to-solution by 90x.
Avoiding Communication in Logistic Regression
Nov 16, 2020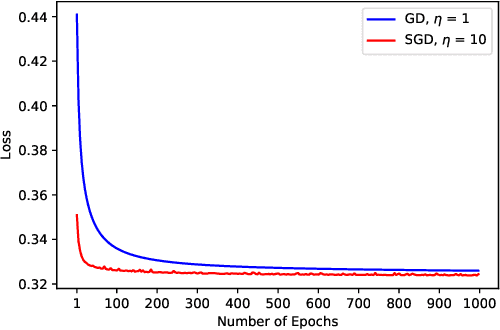
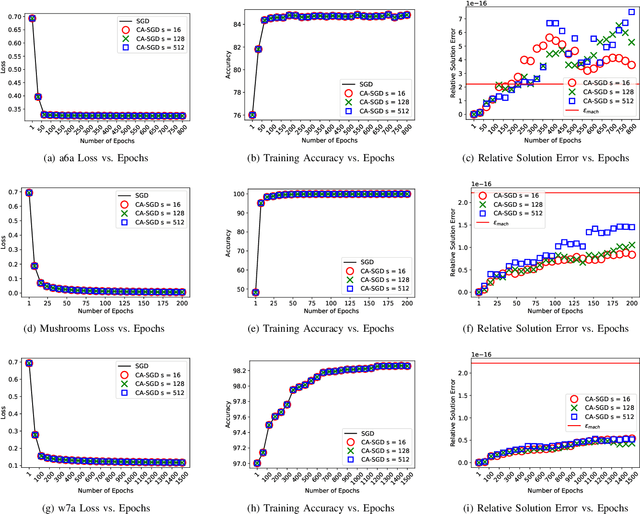
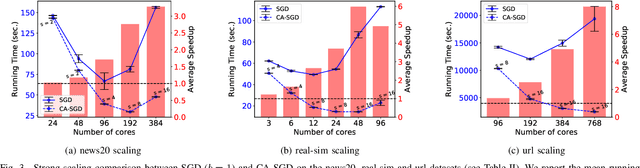
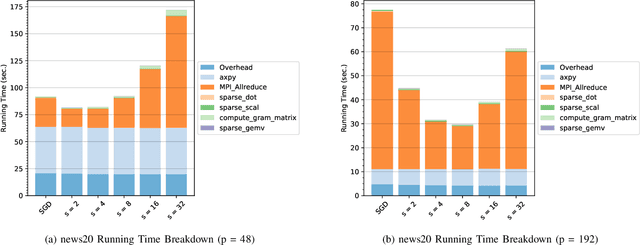
Stochastic gradient descent (SGD) is one of the most widely used optimization methods for solving various machine learning problems. SGD solves an optimization problem by iteratively sampling a few data points from the input data, computing gradients for the selected data points, and updating the solution. However, in a parallel setting, SGD requires interprocess communication at every iteration. We introduce a new communication-avoiding technique for solving the logistic regression problem using SGD. This technique re-organizes the SGD computations into a form that communicates every $s$ iterations instead of every iteration, where $s$ is a tuning parameter. We prove theoretical flops, bandwidth, and latency upper bounds for SGD and its new communication-avoiding variant. Furthermore, we show experimental results that illustrate that the new Communication-Avoiding SGD (CA-SGD) method can achieve speedups of up to $4.97\times$ on a high-performance Infiniband cluster without altering the convergence behavior or accuracy.
Training EfficientNets at Supercomputer Scale: 83% ImageNet Top-1 Accuracy in One Hour
Nov 05, 2020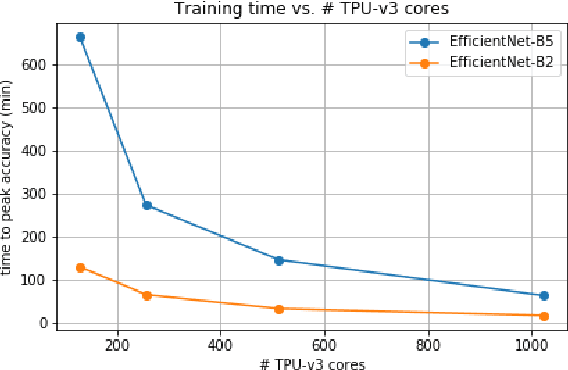
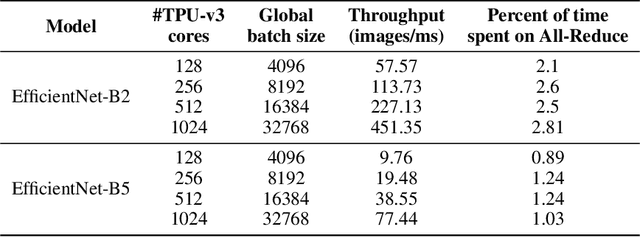
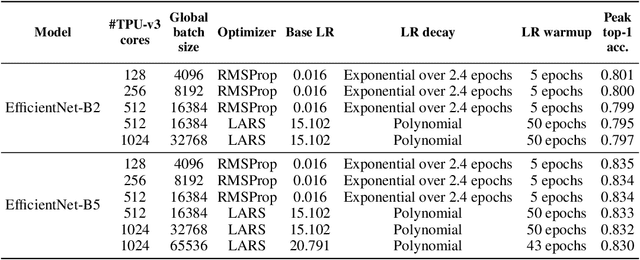
EfficientNets are a family of state-of-the-art image classification models based on efficiently scaled convolutional neural networks. Currently, EfficientNets can take on the order of days to train; for example, training an EfficientNet-B0 model takes 23 hours on a Cloud TPU v2-8 node. In this paper, we explore techniques to scale up the training of EfficientNets on TPU-v3 Pods with 2048 cores, motivated by speedups that can be achieved when training at such scales. We discuss optimizations required to scale training to a batch size of 65536 on 1024 TPU-v3 cores, such as selecting large batch optimizers and learning rate schedules as well as utilizing distributed evaluation and batch normalization techniques. Additionally, we present timing and performance benchmarks for EfficientNet models trained on the ImageNet dataset in order to analyze the behavior of EfficientNets at scale. With our optimizations, we are able to train EfficientNet on ImageNet to an accuracy of 83% in 1 hour and 4 minutes.
The Limit of the Batch Size
Jun 15, 2020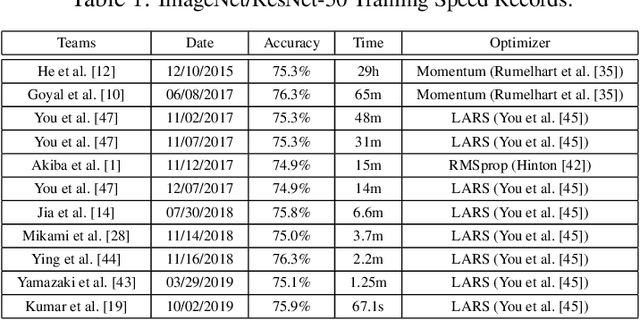
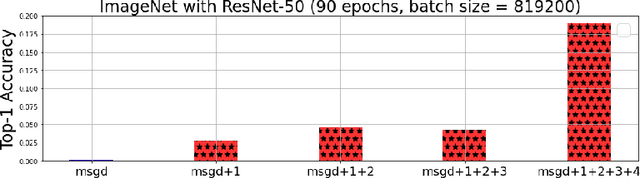

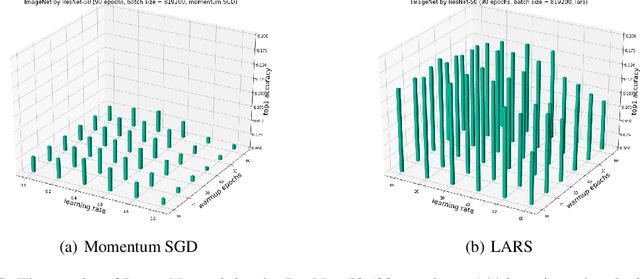
Large-batch training is an efficient approach for current distributed deep learning systems. It has enabled researchers to reduce the ImageNet/ResNet-50 training from 29 hours to around 1 minute. In this paper, we focus on studying the limit of the batch size. We think it may provide a guidance to AI supercomputer and algorithm designers. We provide detailed numerical optimization instructions for step-by-step comparison. Moreover, it is important to understand the generalization and optimization performance of huge batch training. Hoffer et al. introduced "ultra-slow diffusion" theory to large-batch training. However, our experiments show contradictory results with the conclusion of Hoffer et al. We provide comprehensive experimental results and detailed analysis to study the limitations of batch size scaling and "ultra-slow diffusion" theory. For the first time we scale the batch size on ImageNet to at least a magnitude larger than all previous work, and provide detailed studies on the performance of many state-of-the-art optimization schemes under this setting. We propose an optimization recipe that is able to improve the top-1 test accuracy by 18% compared to the baseline.
Auto-Precision Scaling for Distributed Deep Learning
Nov 20, 2019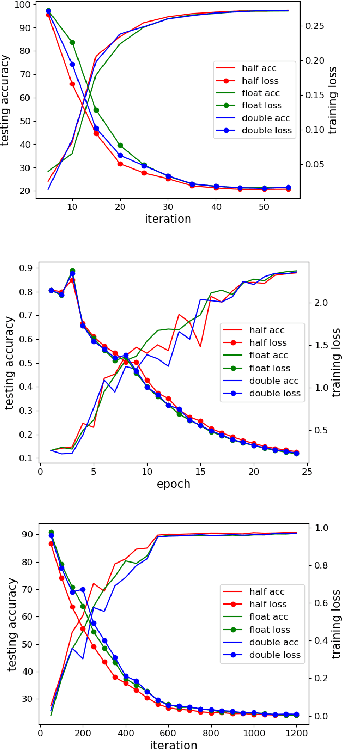
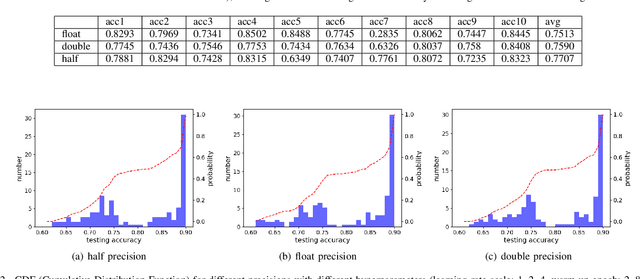
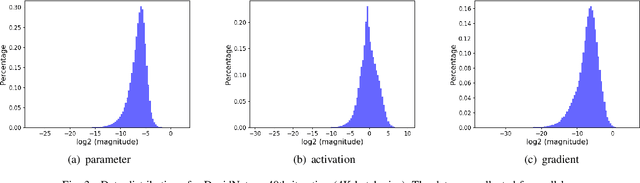
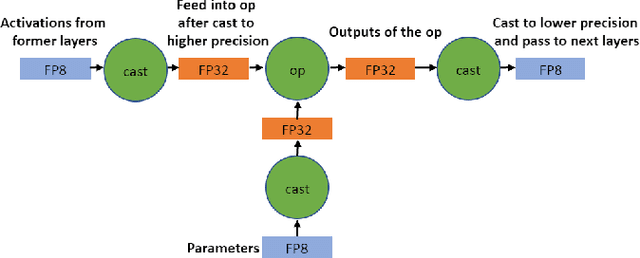
In recent years, large-batch optimization is becoming the key of distributed deep learning. However, large-batch optimization is hard. Straightforwardly porting the code often leads to a significant loss in testing accuracy. As some researchers suggested that large batch optimization leads to a low generalization performance, and they further conjectured that large-batch training needs a higher floating-point precision to achieve a higher generalization performance. To solve this problem, we conduct an open study in this paper. Our target is to find the number of bits that large-batch training needs. To do so, we need a system for customized precision study. However, state-of-the-art systems have some limitations that lower the efficiency of developers and researchers. To solve this problem, we design and implement our own system CPD: A High Performance System for Customized-Precision Distributed DL. In our experiments, our application often loses accuracy if we use a very-low precision (e.g. 8 bits or 4 bits). To solve this problem, we proposed the APS (Auto-Precision-Scaling) algorithm, which is a layer-wise adaptive scheme for gradients shifting. With APS, we are able to make the large-batch training converge with only 4 bits.