 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscovering General Reinforcement Learning Algorithms with Adversarial Environment Design
Oct 04, 2023



The past decade has seen vast progress in deep reinforcement learning (RL) on the back of algorithms manually designed by human researchers. Recently, it has been shown that it is possible to meta-learn update rules, with the hope of discovering algorithms that can perform well on a wide range of RL tasks. Despite impressive initial results from algorithms such as Learned Policy Gradient (LPG), there remains a generalization gap when these algorithms are applied to unseen environments. In this work, we examine how characteristics of the meta-training distribution impact the generalization performance of these algorithms. Motivated by this analysis and building on ideas from Unsupervised Environment Design (UED), we propose a novel approach for automatically generating curricula to maximize the regret of a meta-learned optimizer, in addition to a novel approximation of regret, which we name algorithmic regret (AR). The result is our method, General RL Optimizers Obtained Via Environment Design (GROOVE). In a series of experiments, we show that GROOVE achieves superior generalization to LPG, and evaluate AR against baseline metrics from UED, identifying it as a critical component of environment design in this setting. We believe this approach is a step towards the discovery of truly general RL algorithms, capable of solving a wide range of real-world environments.
Stabilizing Unsupervised Environment Design with a Learned Adversary
Aug 22, 2023



A key challenge in training generally-capable agents is the design of training tasks that facilitate broad generalization and robustness to environment variations. This challenge motivates the problem setting of Unsupervised Environment Design (UED), whereby a student agent trains on an adaptive distribution of tasks proposed by a teacher agent. A pioneering approach for UED is PAIRED, which uses reinforcement learning (RL) to train a teacher policy to design tasks from scratch, making it possible to directly generate tasks that are adapted to the agent's current capabilities. Despite its strong theoretical backing, PAIRED suffers from a variety of challenges that hinder its practical performance. Thus, state-of-the-art methods currently rely on curation and mutation rather than generation of new tasks. In this work, we investigate several key shortcomings of PAIRED and propose solutions for each shortcoming. As a result, we make it possible for PAIRED to match or exceed state-of-the-art methods, producing robust agents in several established challenging procedurally-generated environments, including a partially-observed maze navigation task and a continuous-control car racing environment. We believe this work motivates a renewed emphasis on UED methods based on learned models that directly generate challenging environments, potentially unlocking more open-ended RL training and, as a result, more general agents.
Synthetic Experience Replay
Mar 12, 2023



A key theme in the past decade has been that when large neural networks and large datasets combine they can produce remarkable results. In deep reinforcement learning (RL), this paradigm is commonly made possible through experience replay, whereby a dataset of past experiences is used to train a policy or value function. However, unlike in supervised or self-supervised learning, an RL agent has to collect its own data, which is often limited. Thus, it is challenging to reap the benefits of deep learning, and even small neural networks can overfit at the start of training. In this work, we leverage the tremendous recent progress in generative modeling and propose Synthetic Experience Replay (SynthER), a diffusion-based approach to arbitrarily upsample an agent's collected experience. We show that SynthER is an effective method for training RL agents across offline and online settings. In offline settings, we observe drastic improvements both when upsampling small offline datasets and when training larger networks with additional synthetic data. Furthermore, SynthER enables online agents to train with a much higher update-to-data ratio than before, leading to a large increase in sample efficiency, without any algorithmic changes. We believe that synthetic training data could open the door to realizing the full potential of deep learning for replay-based RL algorithms from limited data.
MAESTRO: Open-Ended Environment Design for Multi-Agent Reinforcement Learning
Mar 06, 2023Open-ended learning methods that automatically generate a curriculum of increasingly challenging tasks serve as a promising avenue toward generally capable reinforcement learning agents. Existing methods adapt curricula independently over either environment parameters (in single-agent settings) or co-player policies (in multi-agent settings). However, the strengths and weaknesses of co-players can manifest themselves differently depending on environmental features. It is thus crucial to consider the dependency between the environment and co-player when shaping a curriculum in multi-agent domains. In this work, we use this insight and extend Unsupervised Environment Design (UED) to multi-agent environments. We then introduce Multi-Agent Environment Design Strategist for Open-Ended Learning (MAESTRO), the first multi-agent UED approach for two-player zero-sum settings. MAESTRO efficiently produces adversarial, joint curricula over both environments and co-players and attains minimax-regret guarantees at Nash equilibrium. Our experiments show that MAESTRO outperforms a number of strong baselines on competitive two-player games, spanning discrete and continuous control settings.
Human-Timescale Adaptation in an Open-Ended Task Space
Jan 18, 2023



Foundation models have shown impressive adaptation and scalability in supervised and self-supervised learning problems, but so far these successes have not fully translated to reinforcement learning (RL). In this work, we demonstrate that training an RL agent at scale leads to a general in-context learning algorithm that can adapt to open-ended novel embodied 3D problems as quickly as humans. In a vast space of held-out environment dynamics, our adaptive agent (AdA) displays on-the-fly hypothesis-driven exploration, efficient exploitation of acquired knowledge, and can successfully be prompted with first-person demonstrations. Adaptation emerges from three ingredients: (1) meta-reinforcement learning across a vast, smooth and diverse task distribution, (2) a policy parameterised as a large-scale attention-based memory architecture, and (3) an effective automated curriculum that prioritises tasks at the frontier of an agent's capabilities. We demonstrate characteristic scaling laws with respect to network size, memory length, and richness of the training task distribution. We believe our results lay the foundation for increasingly general and adaptive RL agents that perform well across ever-larger open-ended domains.
The Surprising Effectiveness of Latent World Models for Continual Reinforcement Learning
Nov 29, 2022



We study the use of model-based reinforcement learning methods, in particular, world models for continual reinforcement learning. In continual reinforcement learning, an agent is required to solve one task and then another sequentially while retaining performance and preventing forgetting on past tasks. World models offer a task-agnostic solution: they do not require knowledge of task changes. World models are a straight-forward baseline for continual reinforcement learning for three main reasons. Firstly, forgetting in the world model is prevented by persisting existing experience replay buffers across tasks, experience from previous tasks is replayed for learning the world model. Secondly, they are sample efficient. Thirdly and finally, they offer a task-agnostic exploration strategy through the uncertainty in the trajectories generated by the world model. We show that world models are a simple and effective continual reinforcement learning baseline. We study their effectiveness on Minigrid and Minihack continual reinforcement learning benchmarks and show that it outperforms state of the art task-agnostic continual reinforcement learning methods.
Learning General World Models in a Handful of Reward-Free Deployments
Oct 23, 2022



Building generally capable agents is a grand challenge for deep reinforcement learning (RL). To approach this challenge practically, we outline two key desiderata: 1) to facilitate generalization, exploration should be task agnostic; 2) to facilitate scalability, exploration policies should collect large quantities of data without costly centralized retraining. Combining these two properties, we introduce the reward-free deployment efficiency setting, a new paradigm for RL research. We then present CASCADE, a novel approach for self-supervised exploration in this new setting. CASCADE seeks to learn a world model by collecting data with a population of agents, using an information theoretic objective inspired by Bayesian Active Learning. CASCADE achieves this by specifically maximizing the diversity of trajectories sampled by the population through a novel cascading objective. We provide theoretical intuition for CASCADE which we show in a tabular setting improves upon na\"ive approaches that do not account for population diversity. We then demonstrate that CASCADE collects diverse task-agnostic datasets and learns agents that generalize zero-shot to novel, unseen downstream tasks on Atari, MiniGrid, Crafter and the DM Control Suite. Code and videos are available at https://ycxuyingchen.github.io/cascade/
Hierarchical Kickstarting for Skill Transfer in Reinforcement Learning
Jul 23, 2022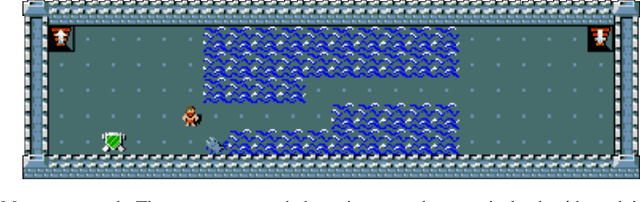
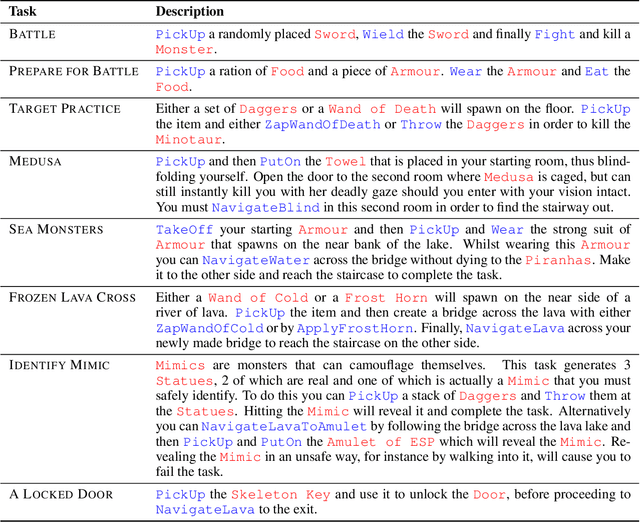
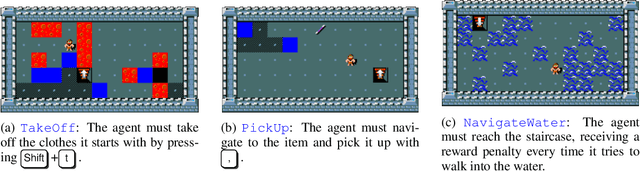
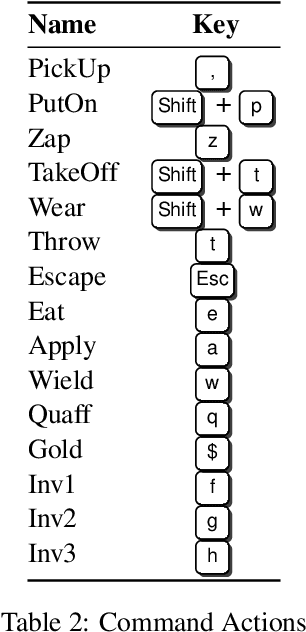
Practising and honing skills forms a fundamental component of how humans learn, yet artificial agents are rarely specifically trained to perform them. Instead, they are usually trained end-to-end, with the hope being that useful skills will be implicitly learned in order to maximise discounted return of some extrinsic reward function. In this paper, we investigate how skills can be incorporated into the training of reinforcement learning (RL) agents in complex environments with large state-action spaces and sparse rewards. To this end, we created SkillHack, a benchmark of tasks and associated skills based on the game of NetHack. We evaluate a number of baselines on this benchmark, as well as our own novel skill-based method Hierarchical Kickstarting (HKS), which is shown to outperform all other evaluated methods. Our experiments show that learning with a prior knowledge of useful skills can significantly improve the performance of agents on complex problems. We ultimately argue that utilising predefined skills provides a useful inductive bias for RL problems, especially those with large state-action spaces and sparse rewards.
Bayesian Generational Population-Based Training
Jul 19, 2022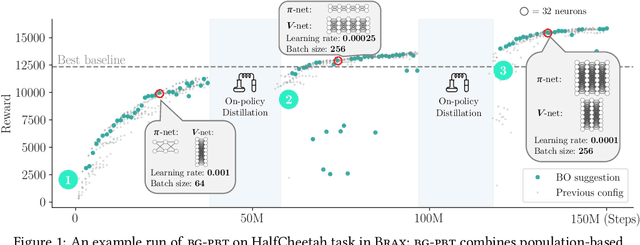
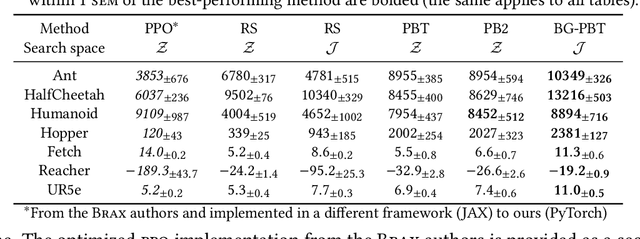
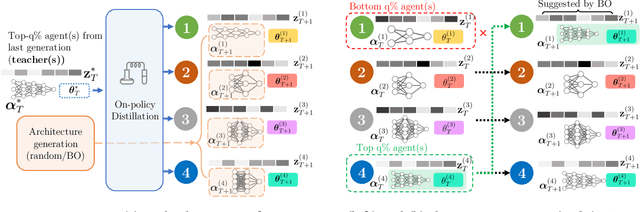
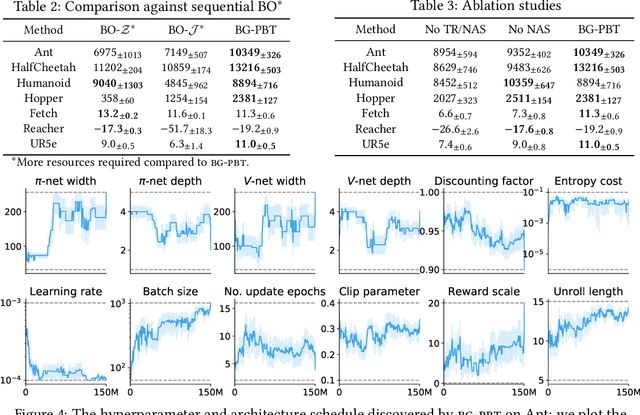
Reinforcement learning (RL) offers the potential for training generally capable agents that can interact autonomously in the real world. However, one key limitation is the brittleness of RL algorithms to core hyperparameters and network architecture choice. Furthermore, non-stationarities such as evolving training data and increased agent complexity mean that different hyperparameters and architectures may be optimal at different points of training. This motivates AutoRL, a class of methods seeking to automate these design choices. One prominent class of AutoRL methods is Population-Based Training (PBT), which have led to impressive performance in several large scale settings. In this paper, we introduce two new innovations in PBT-style methods. First, we employ trust-region based Bayesian Optimization, enabling full coverage of the high-dimensional mixed hyperparameter search space. Second, we show that using a generational approach, we can also learn both architectures and hyperparameters jointly on-the-fly in a single training run. Leveraging the new highly parallelizable Brax physics engine, we show that these innovations lead to large performance gains, significantly outperforming the tuned baseline while learning entire configurations on the fly. Code is available at https://github.com/xingchenwan/bgpbt.
Grounding Aleatoric Uncertainty in Unsupervised Environment Design
Jul 11, 2022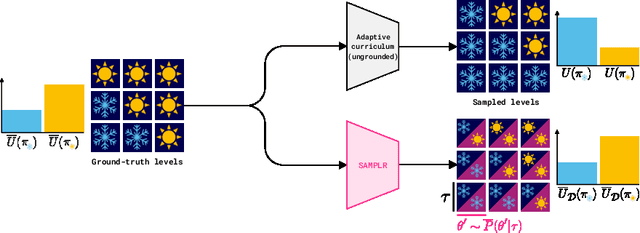
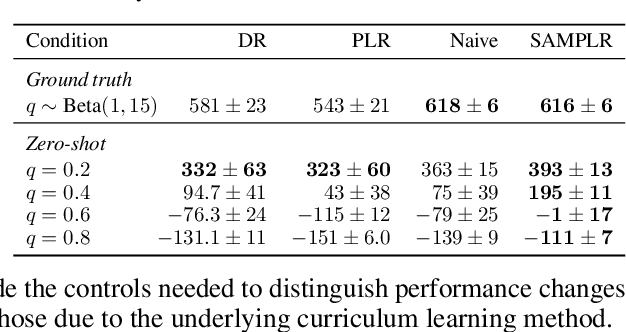
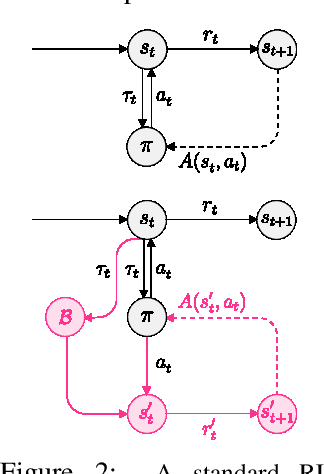
Adaptive curricula in reinforcement learning (RL) have proven effective for producing policies robust to discrepancies between the train and test environment. Recently, the Unsupervised Environment Design (UED) framework generalized RL curricula to generating sequences of entire environments, leading to new methods with robust minimax regret properties. Problematically, in partially-observable or stochastic settings, optimal policies may depend on the ground-truth distribution over aleatoric parameters of the environment in the intended deployment setting, while curriculum learning necessarily shifts the training distribution. We formalize this phenomenon as curriculum-induced covariate shift (CICS), and describe how its occurrence in aleatoric parameters can lead to suboptimal policies. Directly sampling these parameters from the ground-truth distribution avoids the issue, but thwarts curriculum learning. We propose SAMPLR, a minimax regret UED method that optimizes the ground-truth utility function, even when the underlying training data is biased due to CICS. We prove, and validate on challenging domains, that our approach preserves optimality under the ground-truth distribution, while promoting robustness across the full range of environment settings.