 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIdentification of Fully Physical Consistent Inertial Parameters using Optimization on Manifolds
Oct 27, 2016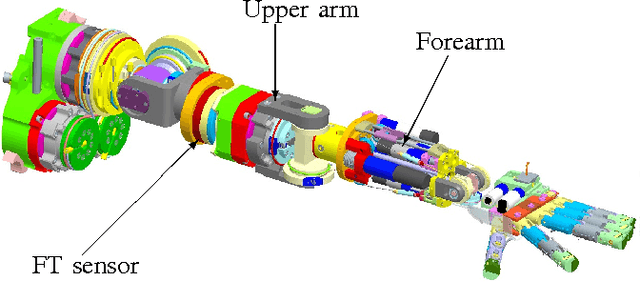
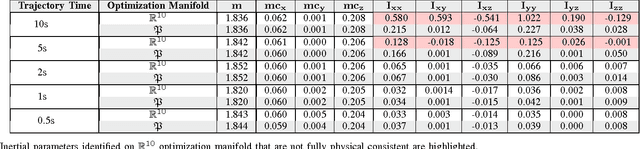
This paper presents a new condition, the fully physical consistency for a set of inertial parameters to determine if they can be generated by a physical rigid body. The proposed condition ensure both the positive definiteness and the triangular inequality of 3D inertia matrices as opposed to existing techniques in which the triangular inequality constraint is ignored. This paper presents also a new parametrization that naturally ensures that the inertial parameters are fully physical consistency. The proposed parametrization is exploited to reformulate the inertial identification problem as a manifold optimization problem, that ensures that the identified parameters can always be generated by a physical body. The proposed optimization problem has been validated with a set of experiments on the iCub humanoid robot.
Automatic Gain Tuning of a Momentum Based Balancing Controller for Humanoid Robots
Oct 21, 2016
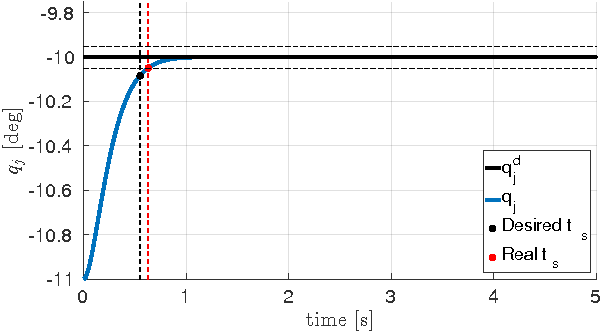
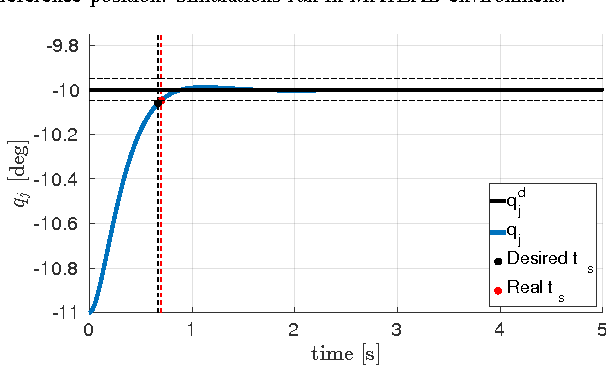
This paper proposes a technique for automatic gain tuning of a momentum based balancing controller for humanoid robots. The controller ensures the stabilization of the centroidal dynamics and the associated zero dynamics. Then, the closed-loop, constrained joint space dynamics is linearized and the controller's gains are chosen so as to obtain desired properties of the linearized system. Symmetry and positive definiteness constraints of gain matrices are enforced by proposing a tracker for symmetric positive definite matrices. Simulation results are carried out on the humanoid robot iCub.
Skin Normal Force Calibration Using Vacuum Bags
Sep 30, 2016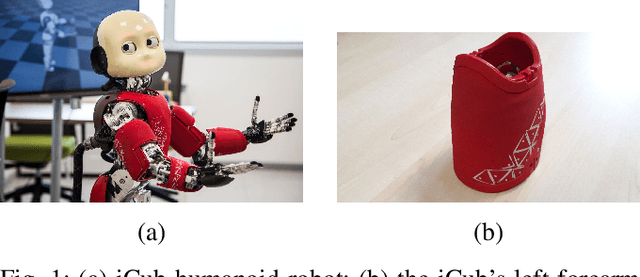
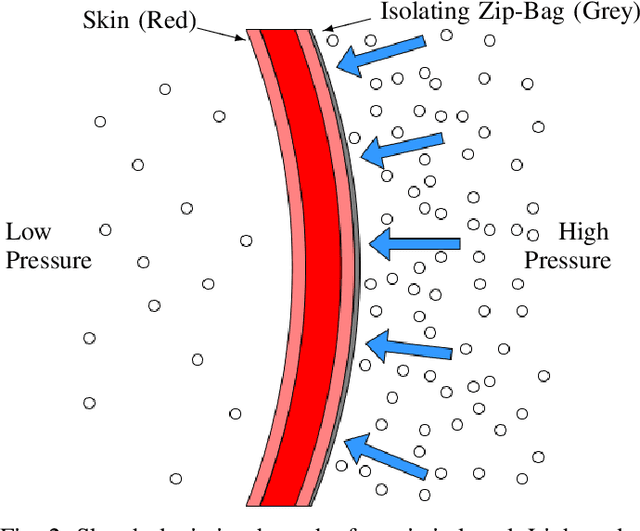
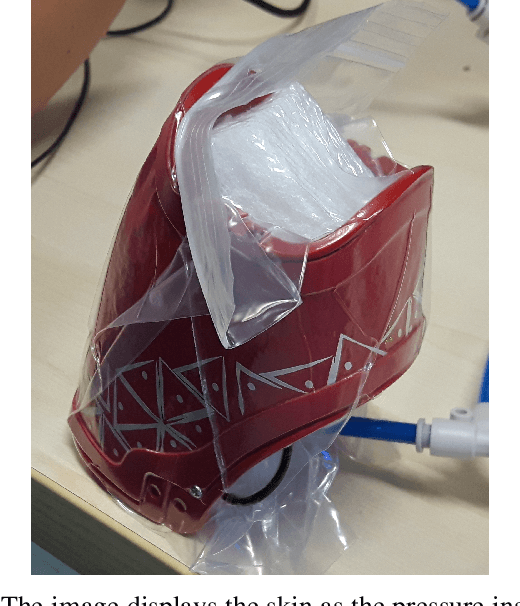
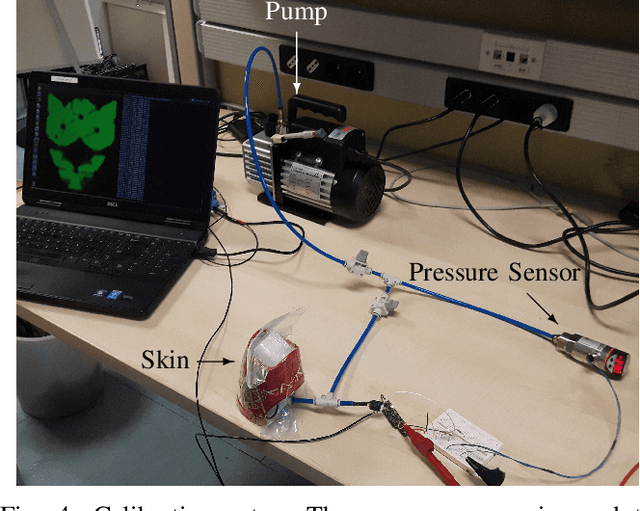
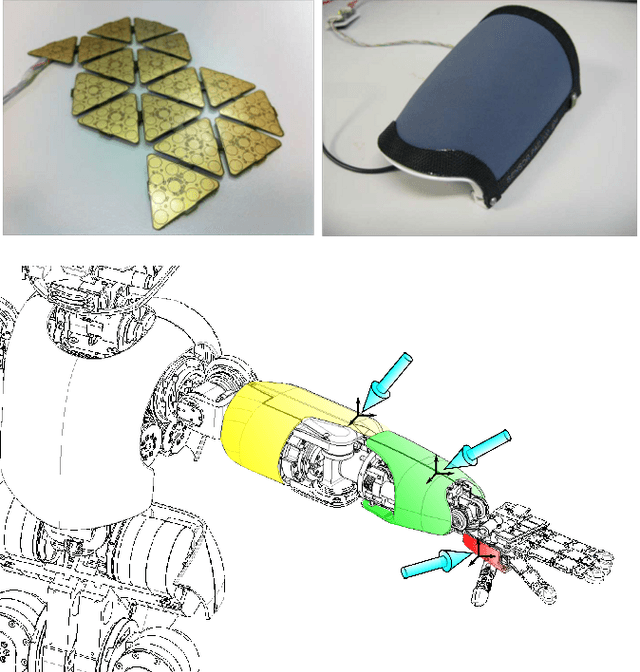
The paper presents a proof of concept to calibrate iCub's skin using vacuum bags. The method's main idea consists in inserting the skin in a vacuum bag, and then decreasing the pressure in the bag to create a uniform pressure distribution on the skin surface. Acquisition and data processing of the bag pressure and sensors' measured capacitance allow us to characterize the relationship between the pressure and the measured capacitance of each sensor. After calibration, integration of the pressure distribution over the skin geometry provides us with the net normal force applied to the skin. Experiments are conducted using the forearm skin of the iCub humanoid robot, and validation results indicate acceptable average errors in force prediction.
Incremental Semiparametric Inverse Dynamics Learning
Jan 18, 2016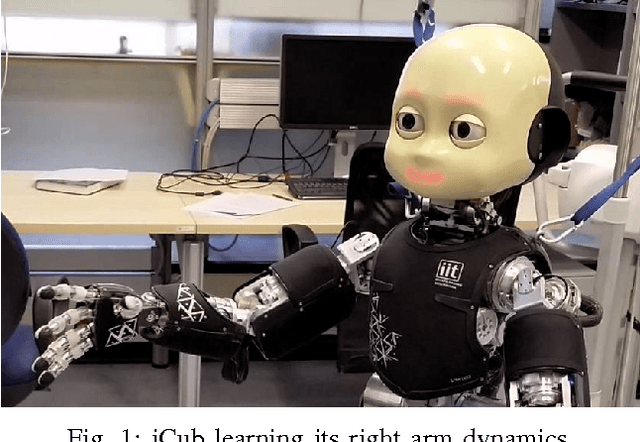
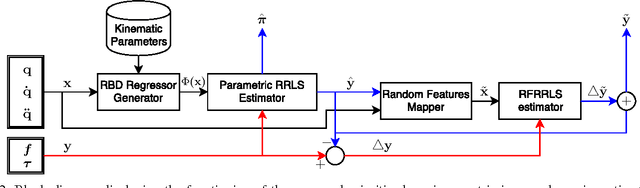
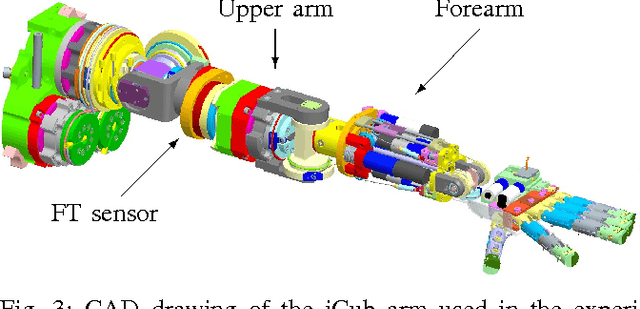
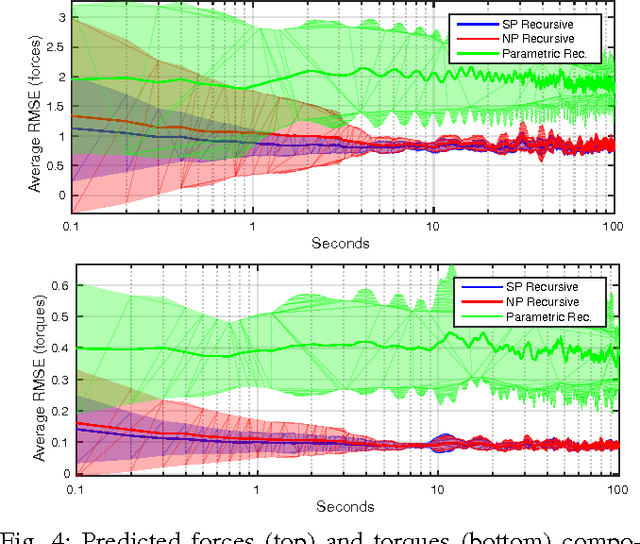
This paper presents a novel approach for incremental semiparametric inverse dynamics learning. In particular, we consider the mixture of two approaches: Parametric modeling based on rigid body dynamics equations and nonparametric modeling based on incremental kernel methods, with no prior information on the mechanical properties of the system. This yields to an incremental semiparametric approach, leveraging the advantages of both the parametric and nonparametric models. We validate the proposed technique learning the dynamics of one arm of the iCub humanoid robot.
In Situ Calibration of Six-Axes Force Torque Sensors using Accelerometer Measurements
Oct 17, 2014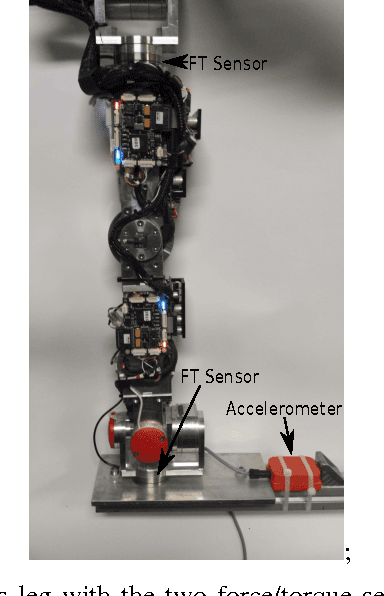
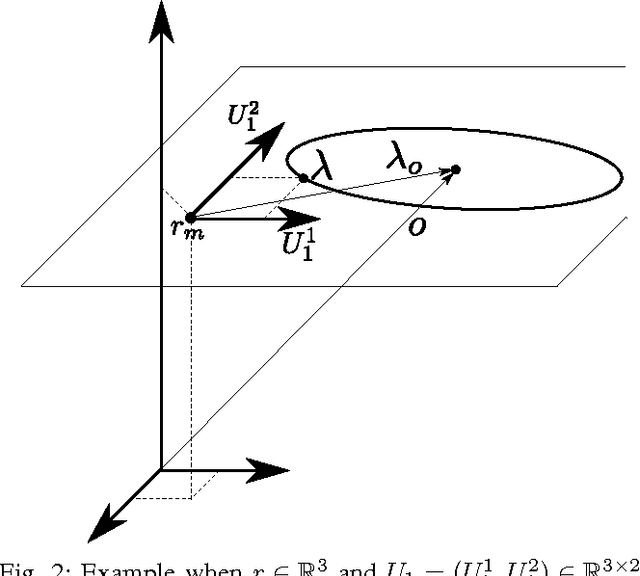
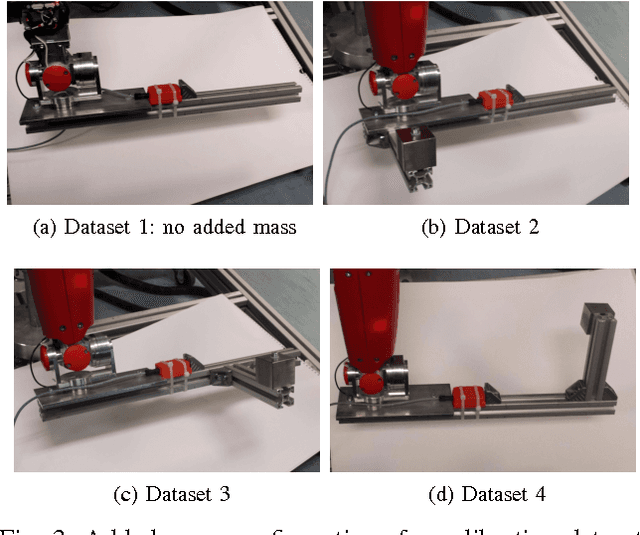
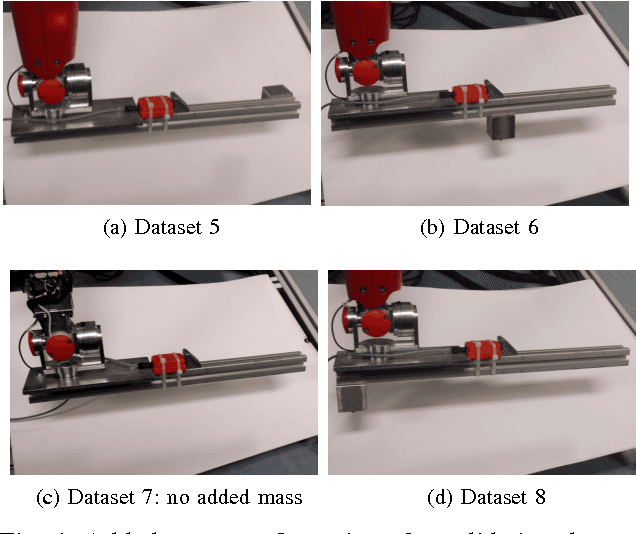
This paper proposes techniques to calibrate six-axis force-torque sensors that can be performed in situ, i.e., without removing the sensor from the hosting system. We assume that the force-torque sensor is attached to a rigid body equipped with an accelerometer. Then, the proposed calibration technique uses the measurements of the accelerometer, but requires neither the knowledge of the inertial parameters nor the orientation of the rigid body. The proposed method exploits the geometry induced by the model between the raw measurements of the sensor and the corresponding force-torque. The validation of the approach is performed by calibrating two six-axis force-torque sensors of the iCub humanoid robot.
Partial Force Control of Constrained Floating-Base Robots
Oct 16, 2014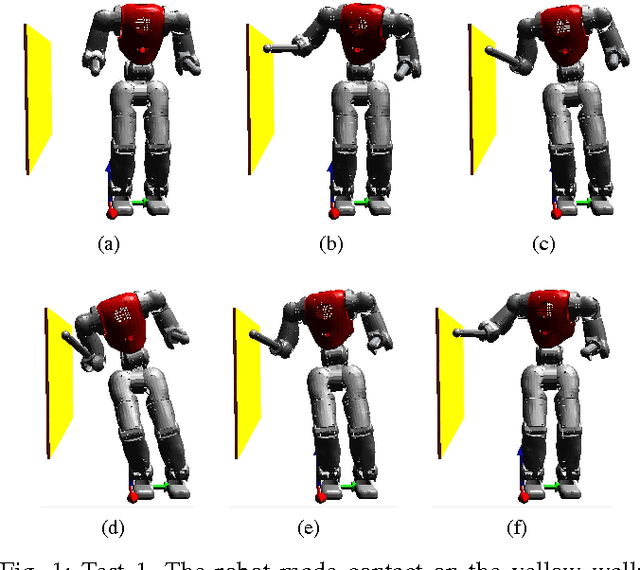
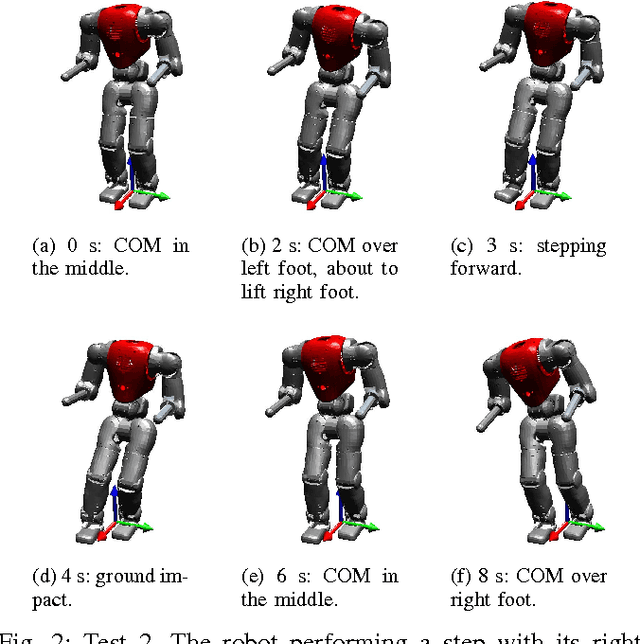
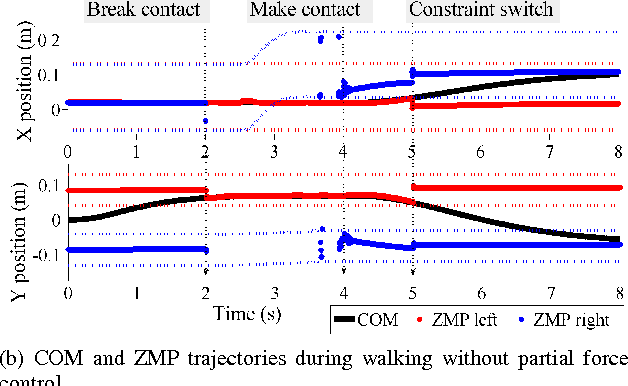
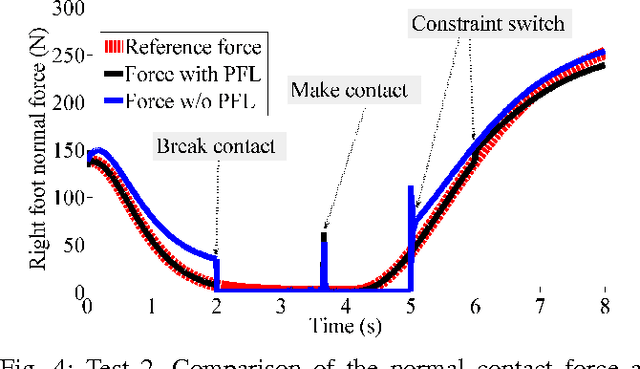
Legged robots are typically in rigid contact with the environment at multiple locations, which add a degree of complexity to their control. We present a method to control the motion and a subset of the contact forces of a floating-base robot. We derive a new formulation of the lexicographic optimization problem typically arising in multitask motion/force control frameworks. The structure of the constraints of the problem (i.e. the dynamics of the robot) allows us to find a sparse analytical solution. This leads to an equivalent optimization with reduced computational complexity, comparable to inverse-dynamics based approaches. At the same time, our method preserves the flexibility of optimization based control frameworks. Simulations were carried out to achieve different multi-contact behaviors on a 23-degree-offreedom humanoid robot, validating the presented approach. A comparison with another state-of-the-art control technique with similar computational complexity shows the benefits of our controller, which can eliminate force/torque discontinuities.
Prioritized Optimal Control
Oct 16, 2014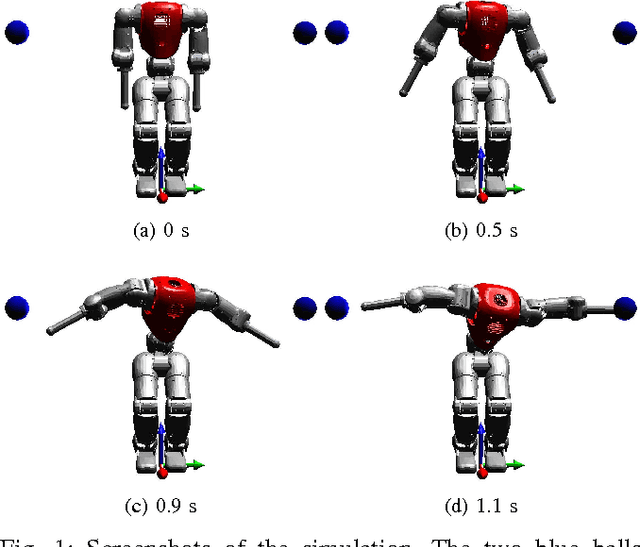
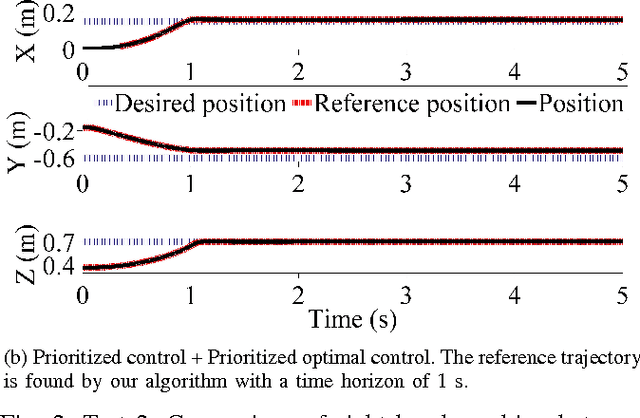
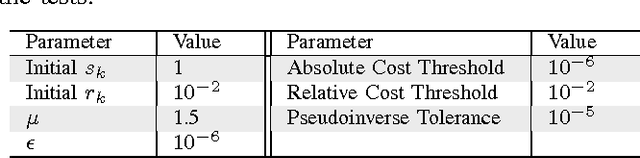
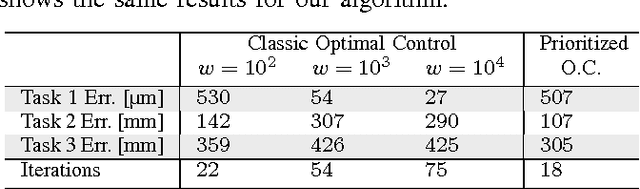
This paper presents a new technique to control highly redundant mechanical systems, such as humanoid robots. We take inspiration from two approaches. Prioritized control is a widespread multi-task technique in robotics and animation: tasks have strict priorities and they are satisfied only as long as they do not conflict with any higher-priority task. Optimal control instead formulates an optimization problem whose solution is either a feedback control policy or a feedforward trajectory of control inputs. We introduce strict priorities in multi-task optimal control problems, as an alternative to weighting task errors proportionally to their importance. This ensures the respect of the specified priorities, while avoiding numerical conditioning issues. We compared our approach with both prioritized control and optimal control with tests on a simulated robot with 11 degrees of freedom.
Inertial Parameter Identification Including Friction and Motor Dynamics
Oct 16, 2014
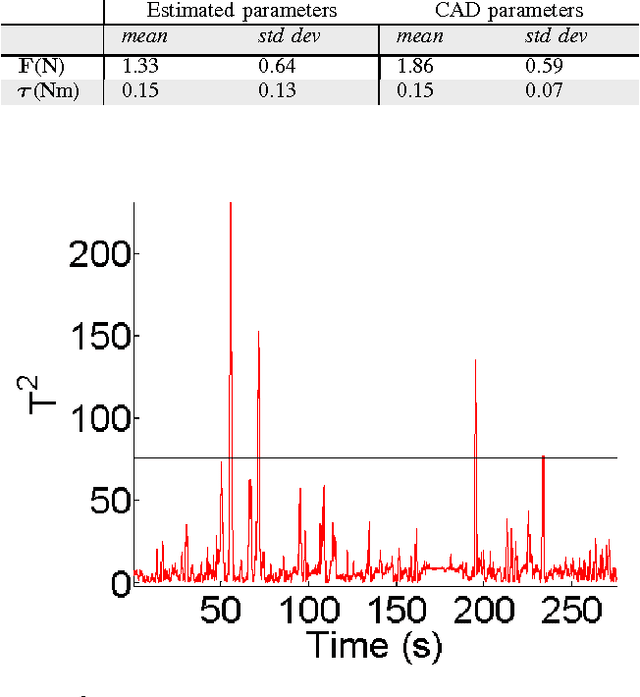
Identification of inertial parameters is fundamental for the implementation of torque-based control in humanoids. At the same time, good models of friction and actuator dynamics are critical for the low-level control of joint torques. We propose a novel method to identify inertial, friction and motor parameters in a single procedure. The identification exploits the measurements of the PWM of the DC motors and a 6-axis force/torque sensor mounted inside the kinematic chain. The partial least-square (PLS) method is used to perform the regression. We identified the inertial, friction and motor parameters of the right arm of the iCub humanoid robot. We verified that the identified model can accurately predict the force/torque sensor measurements and the motor voltages. Moreover, we compared the identified parameters against the CAD parameters, in the prediction of the force/torque sensor measurements. Finally, we showed that the estimated model can effectively detect external contacts, comparing it against a tactile-based contact detection. The presented approach offers some advantages with respect to other state-of-the-art methods, because of its completeness (i.e. it identifies inertial, friction and motor parameters) and simplicity (only one data collection, with no particular requirements).
Prioritized motion-force control of constrained fully-actuated robots: "Task Space Inverse Dynamics"
Oct 14, 2014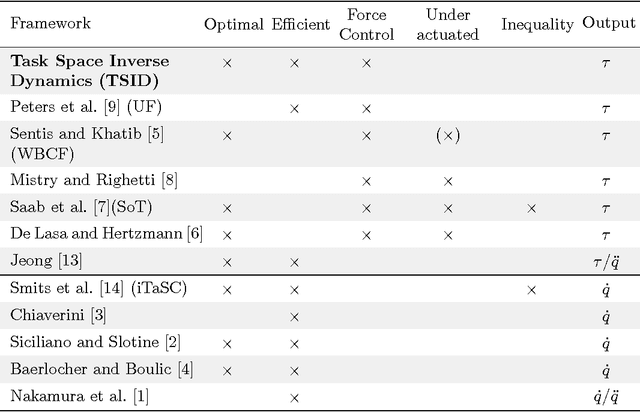
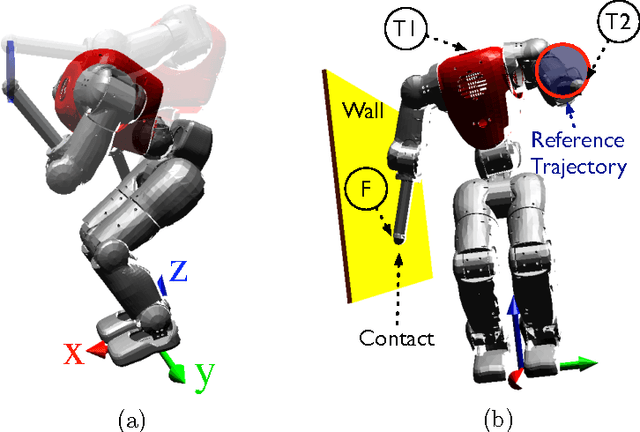
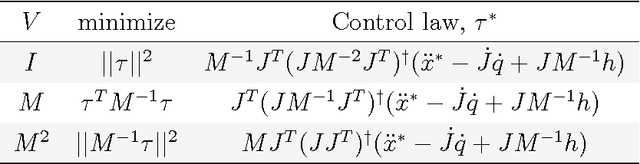
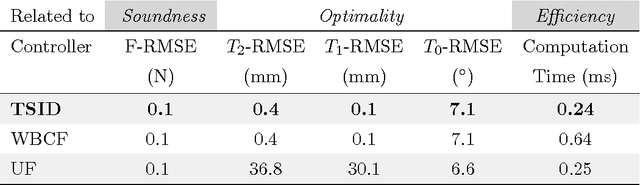
We present a new framework for prioritized multi-task motion-force control of fully-actuated robots. This work is established on a careful review and comparison of the state of the art. Some control frameworks are not optimal, that is they do not find the optimal solution for the secondary tasks. Other frameworks are optimal, but they tackle the control problem at kinematic level, hence they neglect the robot dynamics and they do not allow for force control. Still other frameworks are optimal and consider force control, but they are computationally less efficient than ours. Our final claim is that, for fully-actuated robots, computing the operational-space inverse dynamics is equivalent to computing the inverse kinematics (at acceleration level) and then the joint-space inverse dynamics. Thanks to this fact, our control framework can efficiently compute the optimal solution by decoupling kinematics and dynamics of the robot. We take into account: motion and force control, soft and rigid contacts, free and constrained robots. Tests in simulation validate our control framework, comparing it with other state-of-the-art equivalent frameworks and showing remarkable improvements in optimality and efficiency.
* Pre-print submitted to "Robotics and Autonomous Systems"
Tools for dynamics simulation of robots: a survey based on user feedback
Feb 27, 2014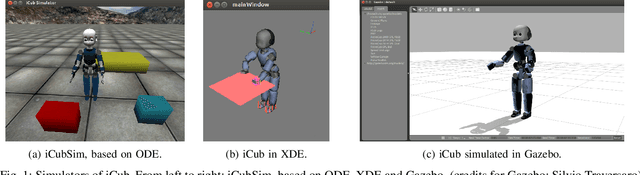
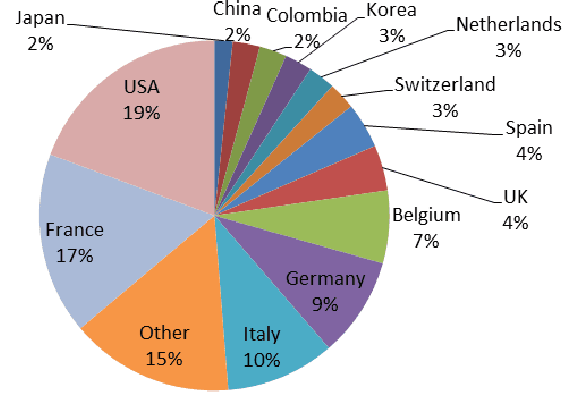
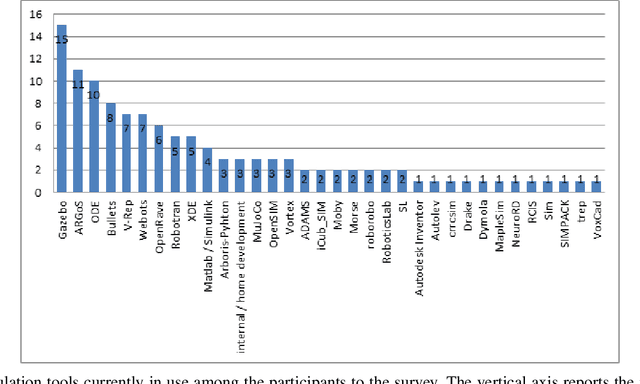
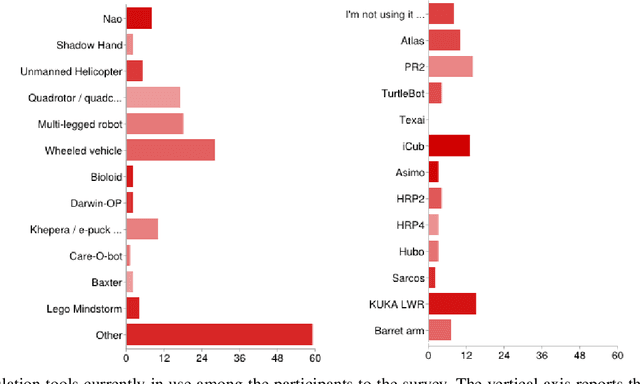
The number of tools for dynamics simulation has grown in the last years. It is necessary for the robotics community to have elements to ponder which of the available tools is the best for their research. As a complement to an objective and quantitative comparison, difficult to obtain since not all the tools are open-source, an element of evaluation is user feedback. With this goal in mind, we created an online survey about the use of dynamical simulation in robotics. This paper reports the analysis of the participants' answers and a descriptive information fiche for the most relevant tools. We believe this report will be helpful for roboticists to choose the best simulation tool for their researches.