 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning-Guided Force-Feedback Model Predictive Control with Obstacle Avoidance for Robotic Deburring
Apr 07, 2026Model Predictive Control (MPC) is widely used for torque-controlled robots, but classical formulations often neglect real-time force feedback and struggle with contact-rich industrial tasks under collision constraints. Deburring in particular requires precise tool insertion, stable force regulation, and collision-free circular motions in challenging configurations, which exceeds the capability of standard MPC pipelines. We propose a framework that integrates force-feedback MPC with diffusion-based motion priors to address these challenges. The diffusion model serves as a memory of motion strategies, providing robust initialization and adaptation across multiple task instances, while MPC ensures safe execution with explicit force tracking, torque feasibility, and collision avoidance. We validate our approach on a torque-controlled manipulator performing industrial deburring tasks. Experiments demonstrate reliable tool insertion, accurate normal force tracking, and circular deburring motions even in hard-to-reach configurations and under obstacle constraints. To our knowledge, this is the first integration of diffusion motion priors with force-feedback MPC for collision-aware, contact-rich industrial tasks.
Warm-Starting Collision-Free Model Predictive Control With Object-Centric Diffusion
Jan 06, 2026Acting in cluttered environments requires predicting and avoiding collisions while still achieving precise control. Conventional optimization-based controllers can enforce physical constraints, but they struggle to produce feasible solutions quickly when many obstacles are present. Diffusion models can generate diverse trajectories around obstacles, yet prior approaches lacked a general and efficient way to condition them on scene structure. In this paper, we show that combining diffusion-based warm-starting conditioned with a latent object-centric representation of the scene and with a collision-aware model predictive controller (MPC) yields reliable and efficient motion generation under strict time limits. Our approach conditions a diffusion transformer on the system state, task, and surroundings, using an object-centric slot attention mechanism to provide a compact obstacle representation suitable for control. The sampled trajectories are refined by an optimal control problem that enforces rigid-body dynamics and signed-distance collision constraints, producing feasible motions in real time. On benchmark tasks, this hybrid method achieved markedly higher success rates and lower latency than sampling-based planners or either component alone. Real-robot experiments with a torque-controlled Panda confirm reliable and safe execution with MPC.
Multi-step manipulation task and motion planning guided by video demonstration
May 13, 2025



This work aims to leverage instructional video to solve complex multi-step task-and-motion planning tasks in robotics. Towards this goal, we propose an extension of the well-established Rapidly-Exploring Random Tree (RRT) planner, which simultaneously grows multiple trees around grasp and release states extracted from the guiding video. Our key novelty lies in combining contact states and 3D object poses extracted from the guiding video with a traditional planning algorithm that allows us to solve tasks with sequential dependencies, for example, if an object needs to be placed at a specific location to be grasped later. We also investigate the generalization capabilities of our approach to go beyond the scene depicted in the instructional video. To demonstrate the benefits of the proposed video-guided planning approach, we design a new benchmark with three challenging tasks: (I) 3D re-arrangement of multiple objects between a table and a shelf, (ii) multi-step transfer of an object through a tunnel, and (iii) transferring objects using a tray similar to a waiter transfers dishes. We demonstrate the effectiveness of our planning algorithm on several robots, including the Franka Emika Panda and the KUKA KMR iiwa. For a seamless transfer of the obtained plans to the real robot, we develop a trajectory refinement approach formulated as an optimal control problem (OCP).
Continuous Collision Detection for a Robotic Arm Mounted on a Cable-Driven Parallel Robot
Sep 24, 2019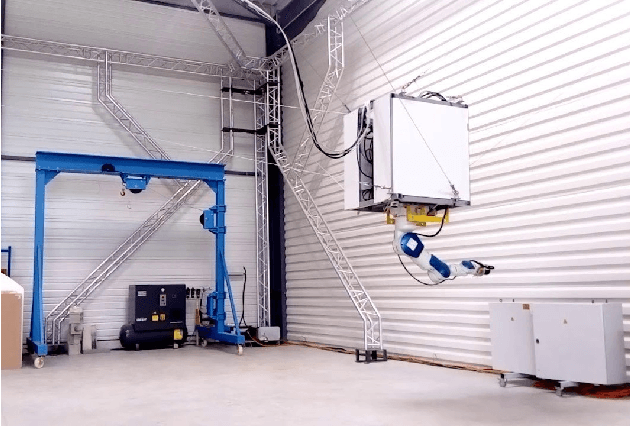
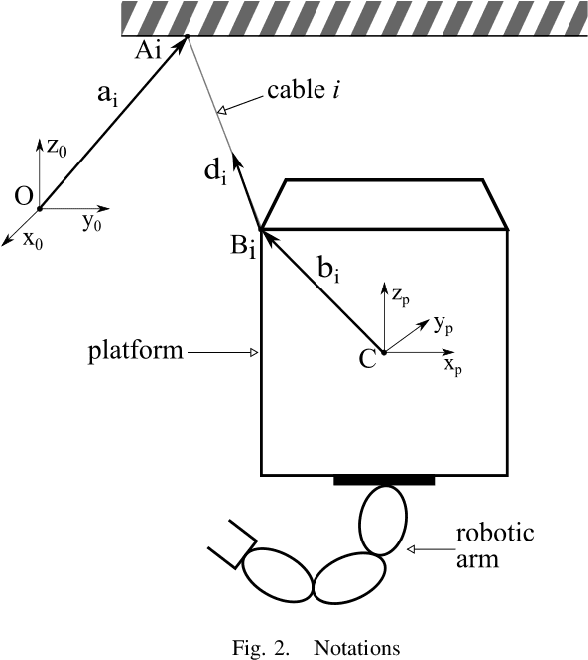
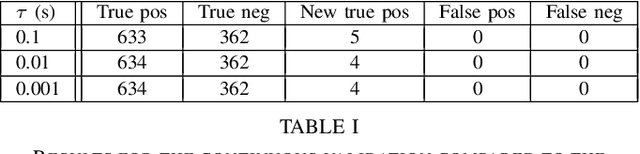
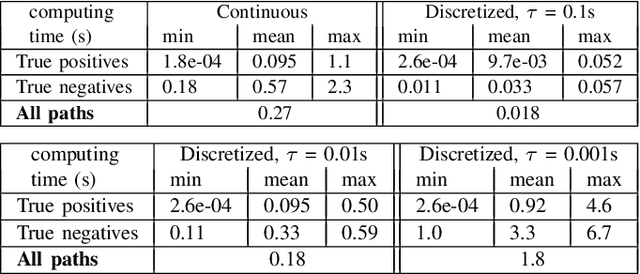
A continuous collision checking method for a cable-driven parallel robot with an embarked robotic arm is proposed in this paper. The method aims at validating paths by checking for collisions between any pair of robot bodies (mobile platform, cables, and arm links). For a pair of bodies, an upper bound on their relative velocity and a lower bound on the distance between the bodies are computed and used to validate a portion of the path. These computations are done repeatedly until a collision is found or the path is validated. The method is integrated within the Humanoid Path Planner (HPP) software, tested with the cable-driven parallel robot CoGiRo, and compared to a discretized validation method.