 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning-Guided Force-Feedback Model Predictive Control with Obstacle Avoidance for Robotic Deburring
Apr 07, 2026Model Predictive Control (MPC) is widely used for torque-controlled robots, but classical formulations often neglect real-time force feedback and struggle with contact-rich industrial tasks under collision constraints. Deburring in particular requires precise tool insertion, stable force regulation, and collision-free circular motions in challenging configurations, which exceeds the capability of standard MPC pipelines. We propose a framework that integrates force-feedback MPC with diffusion-based motion priors to address these challenges. The diffusion model serves as a memory of motion strategies, providing robust initialization and adaptation across multiple task instances, while MPC ensures safe execution with explicit force tracking, torque feasibility, and collision avoidance. We validate our approach on a torque-controlled manipulator performing industrial deburring tasks. Experiments demonstrate reliable tool insertion, accurate normal force tracking, and circular deburring motions even in hard-to-reach configurations and under obstacle constraints. To our knowledge, this is the first integration of diffusion motion priors with force-feedback MPC for collision-aware, contact-rich industrial tasks.
Stepping Stabilization Using a Combination of DCM Tracking and Step Adjustment
Sep 30, 2016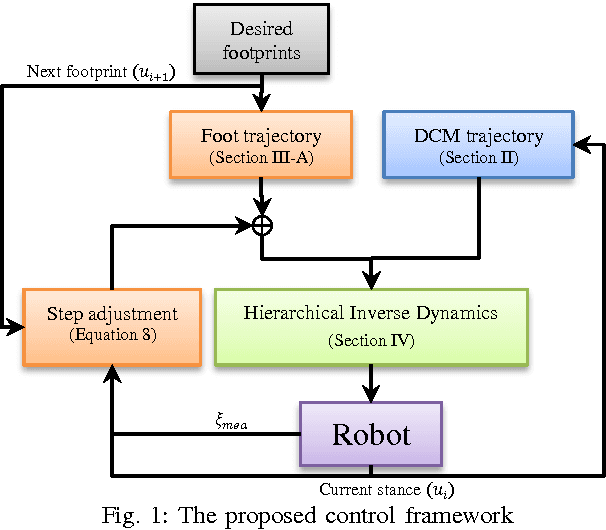
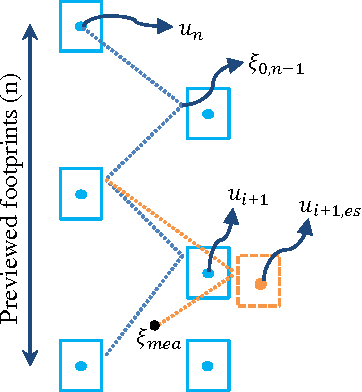
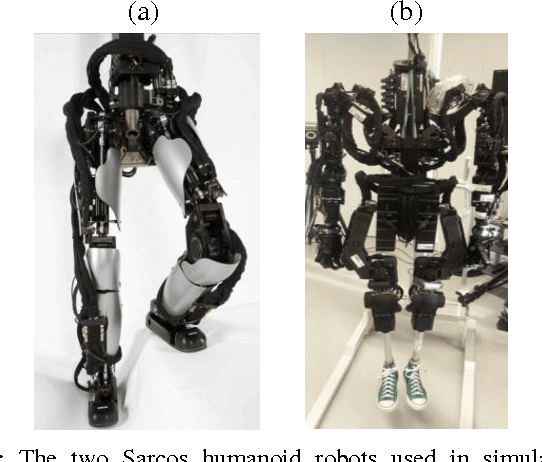
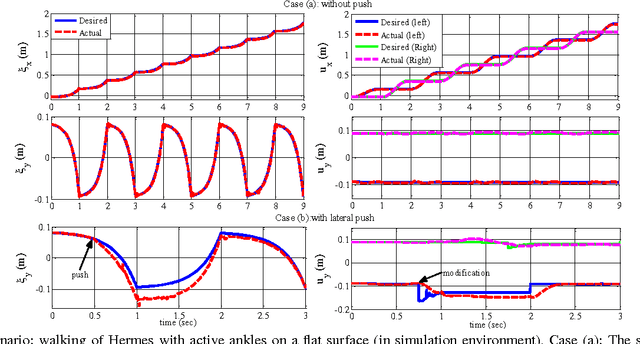
In this paper, a method for stabilizing biped robots stepping by a combination of Divergent Component of Motion (DCM) tracking and step adjustment is proposed. In this method, the DCM trajectory is generated, consistent with the predefined footprints. Furthermore, a swing foot trajectory modification strategy is proposed to adapt the landing point, using DCM measurement. In order to apply the generated trajectories to the full robot, a Hierarchical Inverse Dynamics (HID) is employed. The HID enables us to use different combinations of the DCM tracking and step adjustment for stabilizing different biped robots. Simulation experiments on two scenarios for two different simulated robots, one with active ankles and the other with passive ankles, are carried out. Simulation results demonstrate the effectiveness of the proposed method for robots with both active and passive ankles.