 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMuon Learns More Robust and Transferable Features than Adam
Jun 08, 2026Muon has recently emerged as a state-of-the-art optimizer for pretraining Large Language Models (LLMs) and vision classifiers. Despite its efficiency advantage over Adam and SGD, the feature-learning advantage of Muon remains unclear. This paper investigates Muon's feature-learning advantage through the lens of robustness and transferability. First, by evaluating pretrained models on corrupted images and texts, we show that features learned by Muon are consistently more robust than those learned by Adam and SGD across different architectures, including transformers and Convolutional Neural Networks (CNNs). Using trained layer-wise probes, we further show that this robustness advantage is reflected in larger logit margins across layers. Second, by training linear classifiers or fine-tuning full models from pretrained parameters on downstream tasks, we demonstrate that Muon-learned features transfer more effectively than those learned by Adam and SGD. This transferability advantage is further supported by the diversity of hidden states across layers, as measured by effective rank. Finally, in a representative classification problem with multi-component features, we prove that Muon attains larger margins and higher effective rank than Adam and SGD, providing theoretical support for our empirical findings.
INFUSER: Influence-Guided Self-Evolution Improves Reasoning
Jun 08, 2026Self-evolution offers a scalable path to stronger reasoning: a pretrained language model improves itself with only minimal external supervision. Yet existing methods either depend on extensively curated or teacher-generated training data, or, when the generator runs unsupervised, reward it by a difficulty heuristic that need not improve the solver. We introduce INFUSER, an iterative co-training framework with two co-evolving roles: a Generator that drafts questions and reference golden answers from a pool of unstructured, automatically collected documents, and a Solver that improves by training on them. The solver is trained with standard correctness rewards against the generator-provided answers, while the generator is rewarded by an optimizer-aware influence score that measures whether each proposed question would actually improve the solver on the target distribution. Because this continuous, noisy influence score is poorly served by standard GRPO, we propose DuGRPO, a dual-normalized variant of GRPO, for generator training. Together, these turn the document pool into an adaptive curriculum that favors questions useful to the current solver, not just hard ones. On Qwen3-8B-Base, INFUSER outperforms strong self-evolution baselines with over 20% relative improvement on Olympiad and SuperGPQA benchmarks, and an 8B INFUSER co-evolving generator outperforms a frozen 32B thinking generator on math and coding. Ablations confirm each design choice is necessary, and two extensions, applying INFUSER to an instruction-finetuned anchor and augmenting it with rule-verifiable RLVR data, further demonstrate the flexibility and generalizability of the framework. Code is available at https://github.com/FFishy-git/INFUSER.
Why Muon Outperforms Adam: A Curvature Perspective
Jun 03, 2026Muon improves training efficiency over Adam in large language-model training by about two times, but the local geometric source of this advantage remains unclear. Our work takes a first step toward demystifying Muon's superiority over Adam from a curvature perspective. First, we apply a second-order Taylor approximation to the training landscape and show that Muon achieves a larger one-step loss decrease than Adam at matched validation loss. The two optimizers have comparable first-order gains, but Muon consistently incurs a smaller second-order curvature penalty. Second, we decompose this curvature penalty into the squared update norm and Normalized Directional Sharpness (NDS). We find that Muon and Adam have comparable update norms, so Muon's smaller curvature penalty is driven by lower NDS, not update scale. Third, we study how training data and model structure shape Muon's NDS advantage. Using Zipf-Probabilistic Context-Free Grammar (PCFG) data with controlled imbalance, we show that data imbalance amplifies Muon's NDS advantage over Adam. A within-/cross-layer decomposition further shows that, in the middle and late stages of training, Muon's lower NDS is mainly sustained by smaller within-layer curvature. Beyond empirical evidence, we analyze stylized quadratic problems with heterogeneous curvature and gradient alignment toward high-curvature modes. We prove that Muon attains a smaller average NDS than GD by balancing update energy across curvature groups; when curvature heterogeneity is sufficiently strong, this also yields lower local quadratic loss after the same number of steps.
Neural Networks Provably Learn Spectral Representations for Group Composition
Jun 02, 2026Understanding how structured internal structure emerges during neural network training is central to the study of deep learning. We investigate this phenomenon through the group composition task, where a two-layer neural network is trained to predict $g_1 \star g_2$ for elements of a finite group $G$. By lifting the projected gradient flow to the Fourier domain, we demonstrate that the training dynamics are governed by a Riemannian gradient ascent on a representation-theoretic energy functional. We prove that, under random initialization, this flow drives each neuron to converge almost surely toward a single irreducible representation, while the cross-layer Fourier coefficients achieve a rotational rank-one alignment. This framework provides a representation-theoretic account of feature learning and characterizes a novel low-rank compression phenomenon for matrix-valued group representations. Moreover, for Abelian groups, we provide a complete population-level description: random initialization promotes uniform diversification across nontrivial representations and induces Haar-uniform phases, jointly approximating the indicator via a majority-vote mechanism. We further prove that both phase alignment and representation competition emerge with exponential convergence rates.
Annealed Relaxation of Speculative Decoding for Faster Autoregressive Image Generation
Jan 14, 2026Despite significant progress in autoregressive image generation, inference remains slow due to the sequential nature of AR models and the ambiguity of image tokens, even when using speculative decoding. Recent works attempt to address this with relaxed speculative decoding but lack theoretical grounding. In this paper, we establish the theoretical basis of relaxed SD and propose COOL-SD, an annealed relaxation of speculative decoding built on two key insights. The first analyzes the total variation (TV) distance between the target model and relaxed speculative decoding and yields an optimal resampling distribution that minimizes an upper bound of the distance. The second uses perturbation analysis to reveal an annealing behaviour in relaxed speculative decoding, motivating our annealed design. Together, these insights enable COOL-SD to generate images faster with comparable quality, or achieve better quality at similar latency. Experiments validate the effectiveness of COOL-SD, showing consistent improvements over prior methods in speed-quality trade-offs.
Demystifying the Slash Pattern in Attention: The Role of RoPE
Jan 13, 2026Large Language Models (LLMs) often exhibit slash attention patterns, where attention scores concentrate along the $Δ$-th sub-diagonal for some offset $Δ$. These patterns play a key role in passing information across tokens. But why do they emerge? In this paper, we demystify the emergence of these Slash-Dominant Heads (SDHs) from both empirical and theoretical perspectives. First, by analyzing open-source LLMs, we find that SDHs are intrinsic to models and generalize to out-of-distribution prompts. To explain the intrinsic emergence, we analyze the queries, keys, and Rotary Position Embedding (RoPE), which jointly determine attention scores. Our empirical analysis reveals two characteristic conditions of SDHs: (1) Queries and keys are almost rank-one, and (2) RoPE is dominated by medium- and high-frequency components. Under these conditions, queries and keys are nearly identical across tokens, and interactions between medium- and high-frequency components of RoPE give rise to SDHs. Beyond empirical evidence, we theoretically show that these conditions are sufficient to ensure the emergence of SDHs by formalizing them as our modeling assumptions. Particularly, we analyze the training dynamics of a shallow Transformer equipped with RoPE under these conditions, and prove that models trained via gradient descent exhibit SDHs. The SDHs generalize to out-of-distribution prompts.
Sparse-to-Dense: A Free Lunch for Lossless Acceleration of Video Understanding in LLMs
May 25, 2025Due to the auto-regressive nature of current video large language models (Video-LLMs), the inference latency increases as the input sequence length grows, posing challenges for the efficient processing of video sequences that are usually very long. We observe that during decoding, the attention scores of most tokens in Video-LLMs tend to be sparse and concentrated, with only certain tokens requiring comprehensive full attention. Based on this insight, we introduce Sparse-to-Dense (StD), a novel decoding strategy that integrates two distinct modules: one leveraging sparse top-K attention and the other employing dense full attention. These modules collaborate to accelerate Video-LLMs without loss. The fast (sparse) model speculatively decodes multiple tokens, while the slow (dense) model verifies them in parallel. StD is a tuning-free, plug-and-play solution that achieves up to a 1.94$\times$ walltime speedup in video processing. It maintains model performance while enabling a seamless transition from a standard Video-LLM to a sparse Video-LLM with minimal code modifications.
BanditSpec: Adaptive Speculative Decoding via Bandit Algorithms
May 21, 2025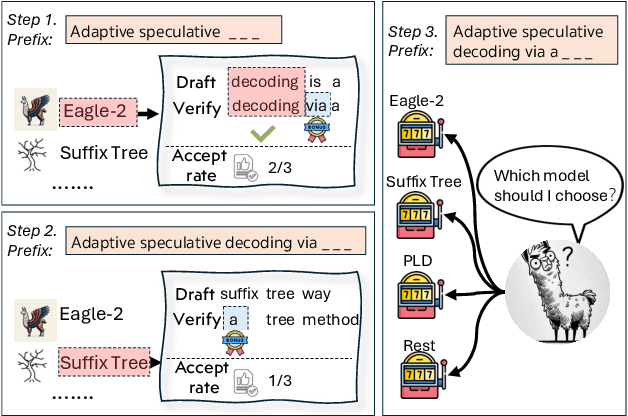
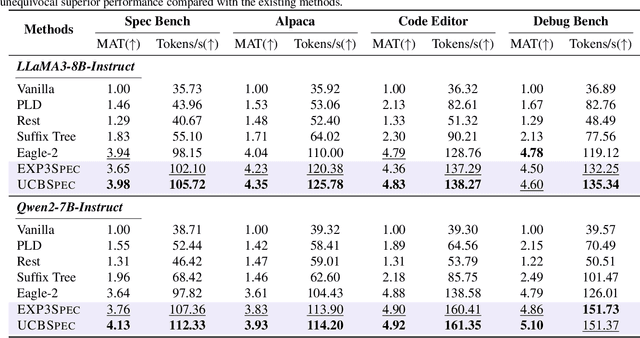
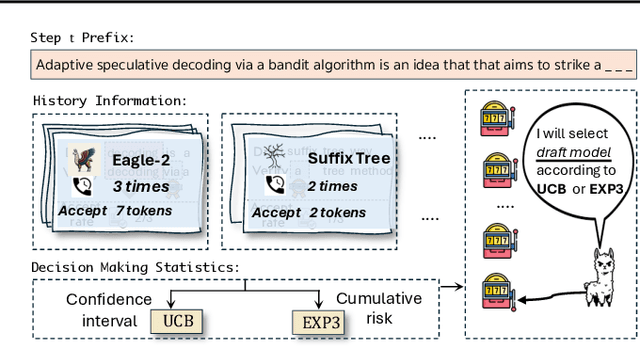
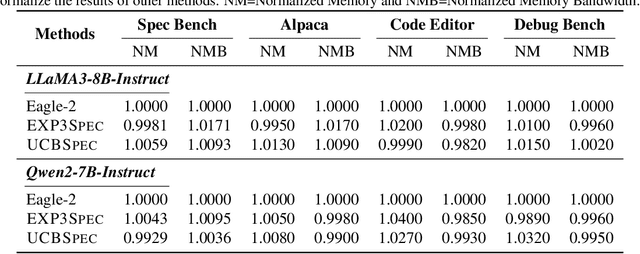
Speculative decoding has emerged as a popular method to accelerate the inference of Large Language Models (LLMs) while retaining their superior text generation performance. Previous methods either adopt a fixed speculative decoding configuration regardless of the prefix tokens, or train draft models in an offline or online manner to align them with the context. This paper proposes a training-free online learning framework to adaptively choose the configuration of the hyperparameters for speculative decoding as text is being generated. We first formulate this hyperparameter selection problem as a Multi-Armed Bandit problem and provide a general speculative decoding framework BanditSpec. Furthermore, two bandit-based hyperparameter selection algorithms, UCBSpec and EXP3Spec, are designed and analyzed in terms of a novel quantity, the stopping time regret. We upper bound this regret under both stochastic and adversarial reward settings. By deriving an information-theoretic impossibility result, it is shown that the regret performance of UCBSpec is optimal up to universal constants. Finally, extensive empirical experiments with LLaMA3 and Qwen2 demonstrate that our algorithms are effective compared to existing methods, and the throughput is close to the oracle best hyperparameter in simulated real-life LLM serving scenarios with diverse input prompts.
LongSpec: Long-Context Speculative Decoding with Efficient Drafting and Verification
Feb 24, 2025
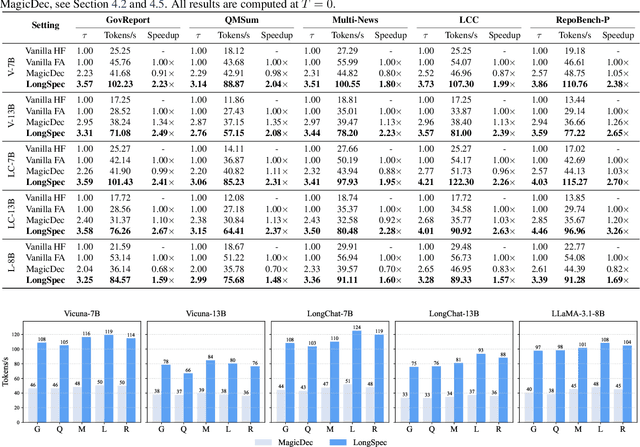

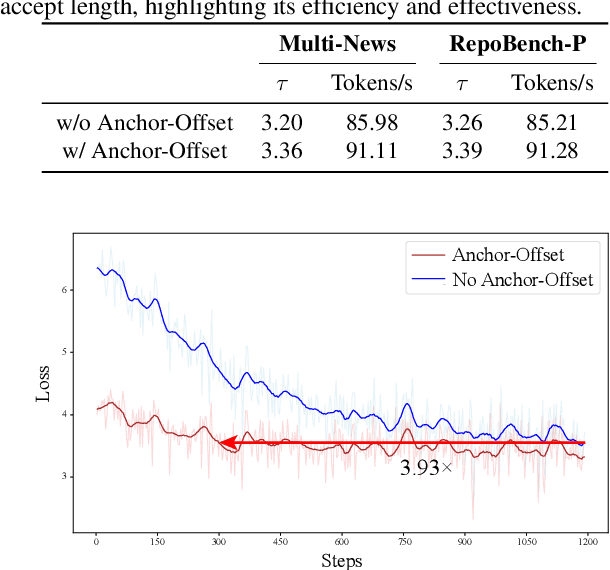
Speculative decoding has become a promising technique to mitigate the high inference latency of autoregressive decoding in Large Language Models (LLMs). Despite its promise, the effective application of speculative decoding in LLMs still confronts three key challenges: the increasing memory demands of the draft model, the distribution shift between the short-training corpora and long-context inference, and inefficiencies in attention implementation. In this work, we enhance the performance of speculative decoding in long-context settings by addressing these challenges. First, we propose a memory-efficient draft model with a constant-sized Key-Value (KV) cache. Second, we introduce novel position indices for short-training data, enabling seamless adaptation from short-context training to long-context inference. Finally, we present an innovative attention aggregation method that combines fast implementations for prefix computation with standard attention for tree mask handling, effectively resolving the latency and memory inefficiencies of tree decoding. Our approach achieves strong results on various long-context tasks, including repository-level code completion, long-context summarization, and o1-like long reasoning tasks, demonstrating significant improvements in latency reduction. The code is available at https://github.com/sail-sg/LongSpec.
Enhancing Multi-Text Long Video Generation Consistency without Tuning: Time-Frequency Analysis, Prompt Alignment, and Theory
Dec 23, 2024



Despite the considerable progress achieved in the long video generation problem, there is still significant room to improve the consistency of the videos, particularly in terms of smoothness and transitions between scenes. We address these issues to enhance the consistency and coherence of videos generated with either single or multiple prompts. We propose the Time-frequency based temporal Attention Reweighting Algorithm (TiARA), which meticulously edits the attention score matrix based on the Discrete Short-Time Fourier Transform. Our method is supported by a theoretical guarantee, the first-of-its-kind for frequency-based methods in diffusion models. For videos generated by multiple prompts, we further investigate key factors affecting prompt interpolation quality and propose PromptBlend, an advanced prompt interpolation pipeline. The efficacy of our proposed method is validated via extensive experimental results, exhibiting consistent and impressive improvements over baseline methods. The code will be released upon acceptance.