 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLow-overhead Beam Training Scheme for Extremely Large-Scale RIS in Near-field
Nov 30, 2022Extremely large-scale reconfigurable intelligent surface (XL-RIS) has recently been proposed and is recognized as a promising technology that can further enhance the capacity of communication systems and compensate for severe path loss . However, the pilot overhead of beam training in XL-RIS-assisted wireless communication systems is enormous because the near-field channel model needs to be taken into account, and the number of candidate codewords in the codebook increases dramatically accordingly. To tackle this problem, we propose two deep learning-based near-field beam training schemes in XL-RIS-assisted communication systems, where deep residual networks are employed to determine the optimal near-field RIS codeword. Specifically, we first propose a far-field beam-based beam training (FBT) scheme in which the received signals of all far-field RIS codewords are fed into the neural network to estimate the optimal near-field RIS codeword. In order to further reduce the pilot overhead, a partial near-field beam-based beam training (PNBT) scheme is proposed, where only the received signals corresponding to the partial near-field XL-RIS codewords are served as input to the neural network. Moreover, we further propose an improved PNBT scheme to enhance the performance of beam training by fully exploring the neural network's output. Finally, simulation results show that the proposed schemes outperform the existing beam training schemes and can reduce the beam sweeping overhead by approximately 95%.
Two Low-complexity Efficient Beamformers for IRS-aided Directional Modulation Networks
Nov 17, 2022As an excellent tool for aiding communication, intelligent reflecting surface (IRS) can extend the coverage area, remove blind area, and achieve a dramatic rate improvement. In this paper, we improve the secret rate (SR) performance at directional modulation (DM) networks using IRS. To fully explore the benefits of IRS, two efficient methods are proposed to enhance SR performance. The first approach computes the confidential message (CM) beamforming vector by maximizing the SR, and the signal-to-leakage-noise ratio (SLNR) method is used to optimize the IRS phase shift matrix, which is called Max-SR-SLNR. Here, Eve is maximally interfered by transmiting artificial noise (AN) along the direct path and null-space projection (NSP) on the remaining two channels. To reduce the computational complexity, the CM, AN beamforming and IRS phase shift design are independently designed in the following methods. The CM beamforming vector is constructed based on maximum ratio transmission (MRT) criteria along the channel from Alice-to-IRS, and phase shift matrix of IRS is directly given by phase alignment (PA) method. This method is called MRT-NSP-PA. Simulation results show that the SR performance of the Max-SR-SLNR method outperforms the MRT-NSP-PA method in the cases of small-scale and medium-scale IRSs, and the latter approaches the former as IRS tends to lager-scale.
Enhanced Secure Wireless Transmission Using IRS-aided Directional Modulation
Sep 29, 2022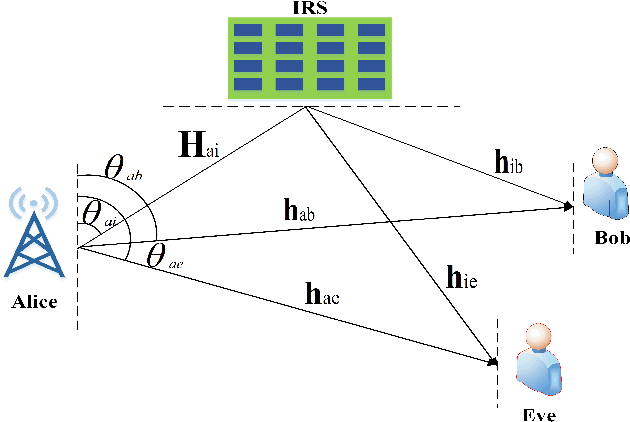

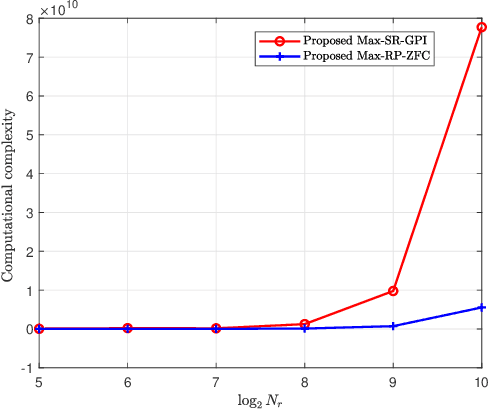
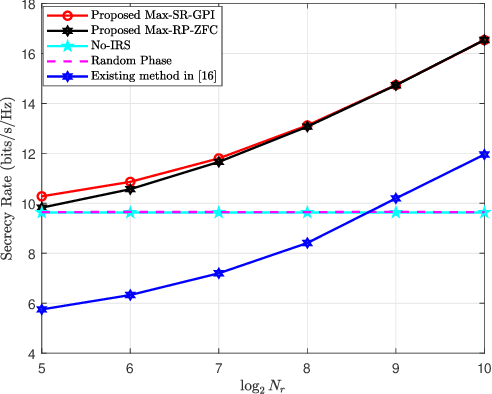
As an excellent aided communication tool, intelligent reflecting surface (IRS) can make a significant rate enhancement and coverage extension. In this paper, we present an investigation on beamforming in an IRS-aided directional modulation (DM) network. To fully explore the advantages of IRS, two beamforming methods with enhanced secrecy rate (SR) performance are proposed. The first method of maximizing secrecy rate (Max-SR) alternately optimizes confidential message (CM) beamforming vector, artificial noise (AN) beamforming vector and phase shift matrix. The first optimization vector is directly computed by the Rayleigh ratio and the last two are solved with generalized power iteration (GPI). This method is called Max-SR-GPI. To reduce the computational complexity, a new method of maximizing receive power with zero-forcing constraint (Max-RP-ZFC) of only reflecting CM and no AN is proposed. Simulation results show that the proposed two methods harvest about 30 percent rate gains over the cases of random-phase IRS and no IRS, and the proposed Max-SR-GPI performs slightly better than the Max-RP-ZFC in terms of SR, particularly in the small-large IRS.
Deep Learning Based DOA Estimation for Hybrid Massive MIMO Receive Array with Overlapped Subarrays
Sep 11, 2022
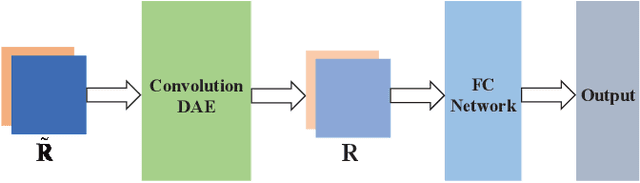
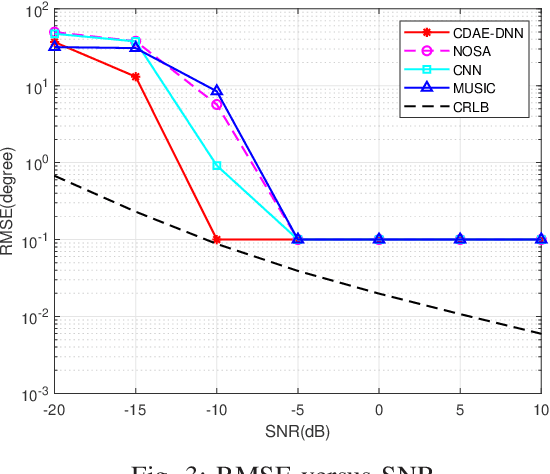
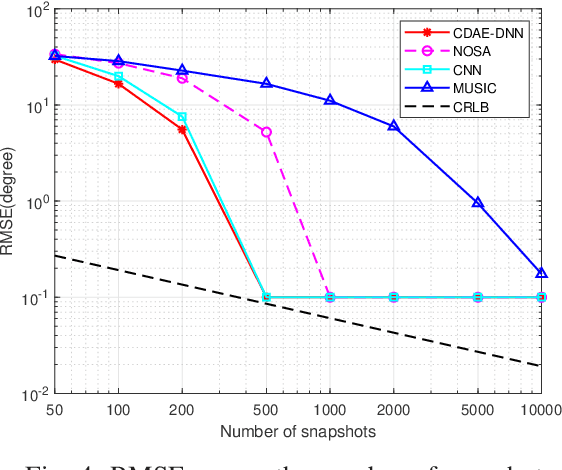
To improve the accuracy of direction-of-arrival (DOA) estimation, a deep learning (DL)-based method called CDAE-DNN is proposed for hybrid analog and digital (HAD) massive MIMO receive array with overlapped subarray (OSA) architecture in this paper. In the proposed method, the sample covariance matrix (SCM) is first input to a convolution denoise autoencoder (CDAE) to remove the approximation error, then the output of CDAE is imported to a fully-connected (FC) network to get the estimation result. Based on the simulation results, the proposed CDAE-DNN has great performance advantages over traditional MUSIC algorithm and CNN-based method, especially in the situations with low signal to noise ratio (SNR) and low snapshot numbers. And the OSA architecture has also been shown to significantly improve the estimation accuracy compared to non-overlapped subarray (NOSA) architecture. In addition, the Cramer-Rao lower bound (CRLB) for the HAD-OSA architecture is presented.
Two-Step mmWave Positioning Scheme with RIS-Part II: Position Estimation and Error Analysis
Aug 16, 2022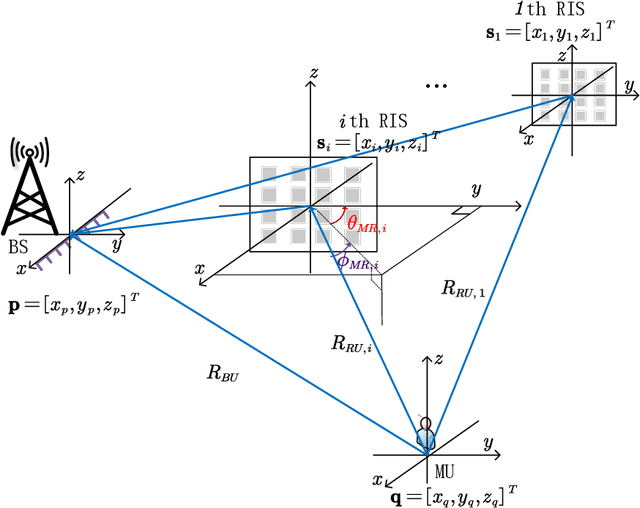
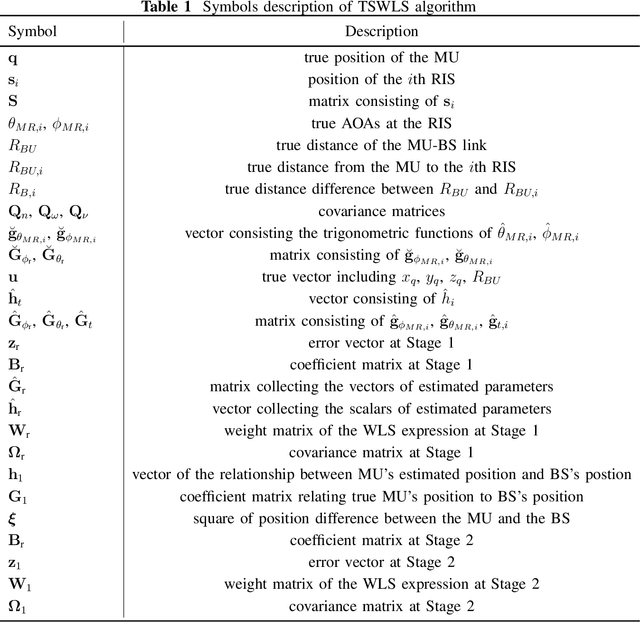
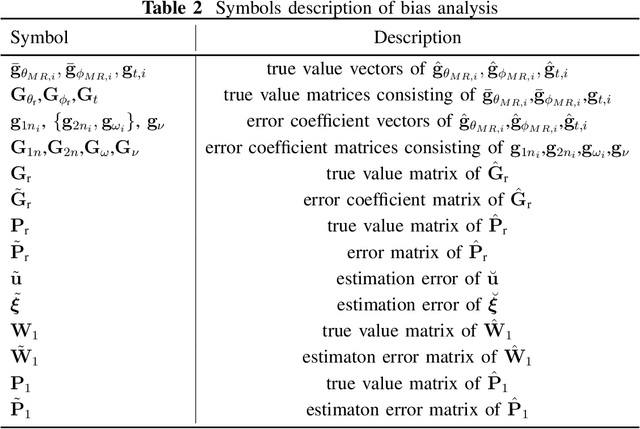
In this series of work, we propose a comprehensive two-step three-dimensional (3D) positioning scheme in a millimeter wave (mmWave) system, where the reconfigurable intelligent surface (RIS) is leveraged to enhance the positioning performance of mobile users (MUs). Specifically, the first step is the estimation error modeling and analysis, while the second step is the corresponding positioning algorithm design and bias analysis. The first step is introduced in Part I of this series of work, and the second step is investigated in this paper. Our aim in this series of work is to obtain the closed-form solution of the MU's position through a two-stage weight least square (TSWLS) algorithm. In the first stage, we construct the pseudolinear equations based on the angle of arrival (AOA) and the time difference of arrival (TDOA) estimation at the RISs, then we obtain a preliminary estimation by solving these equations using the weight least square (WLS) method. Based on the preliminary estimation in the first stage, a new set of pseudolinear equations are obtained, and a finer estimation is obtained by solving the equations using the WLS method in the second stage. By combining the estimation of both stages, the final estimation of the MU's position is obtained. Further, we study the theoretical bias of the proposed algorithm by considering the estimation error in both stages. Simulation results demonstrate the superiority of the proposed positioning scheme.
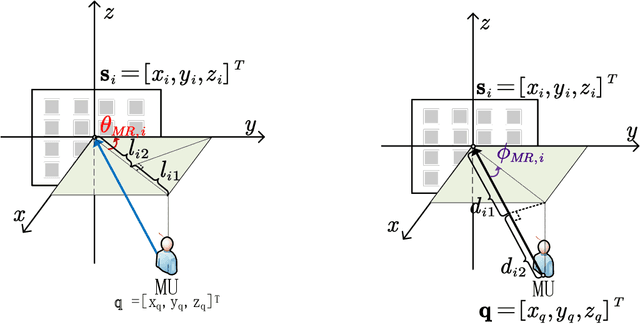
Two-Step mmWave Positioning Scheme with RIS-Part I: Angle Estimation and Analysis
Aug 16, 2022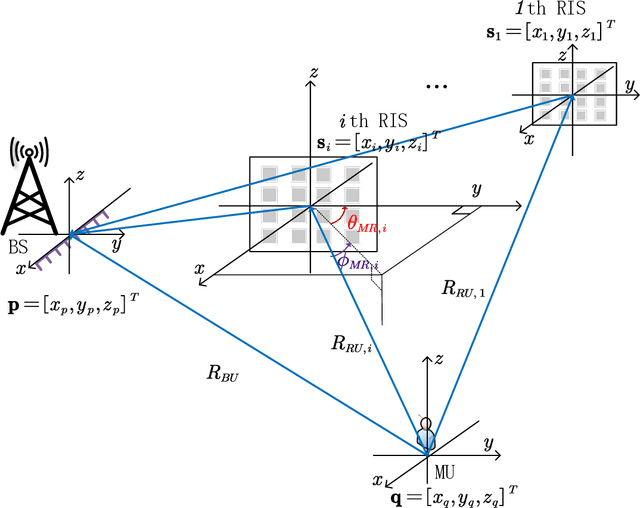
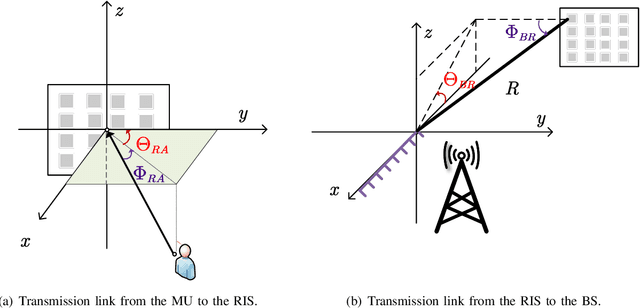
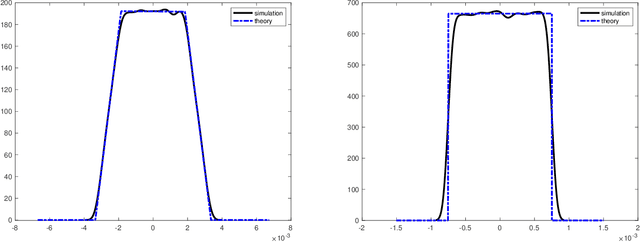
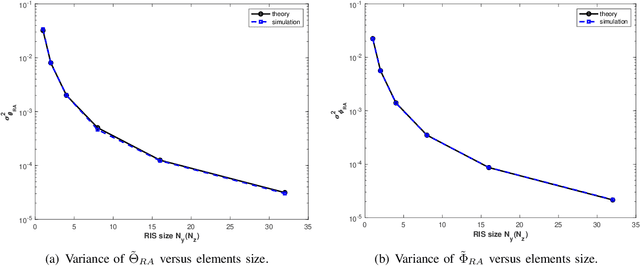
In this series of work, we propose a comprehensive two-step three-dimensional (3D) positioning scheme in a millimeter wave (mmWave) system, where the reconfigurable intelligent surface (RIS) is leveraged to enhance the positioning performance of mobile users (MUs). Specifically, the first step is the estimation error modeling and analysis based on the two-dimensional discrete Fourier transform (2D-DFT) angle estimation technique, while the second step is the corresponding positioning algorithm design and bias analysis. The first step is introduced in this paper, and the second step is investigated in Part II of this series work. Based on 2D-DFT angle estimation, the angle estimation error is modeled and analyzed by deriving its probability density functions (PDF). More specifically, we first derive the PDF by using the geometric relationship between the angles of arrival (AOAs) and their triangle functions. Then, we simplify the intricate expression of the PDF of the AOA estimation error by employing the first-order linear approximation of triangle functions. Finally, we derive a complex expression for the variance based on the derived PDF. Distinctively, for the azimuth estimation error, the variance is separately integrated according to the different non-zero intervals of the PDF, which will be used in the second part of this series work for the analysis of the position estimation error. Extensive simulation results are also presented to verify the accuracy of the derived results.
Optimal Measurement of Drone Swarm in RSS-based Passive Localization with Region Constraints
Aug 08, 2022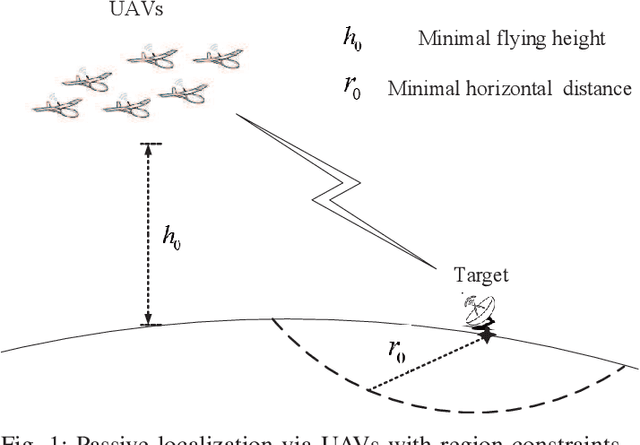
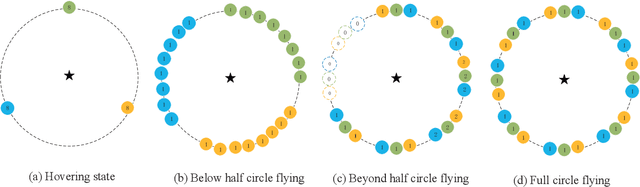
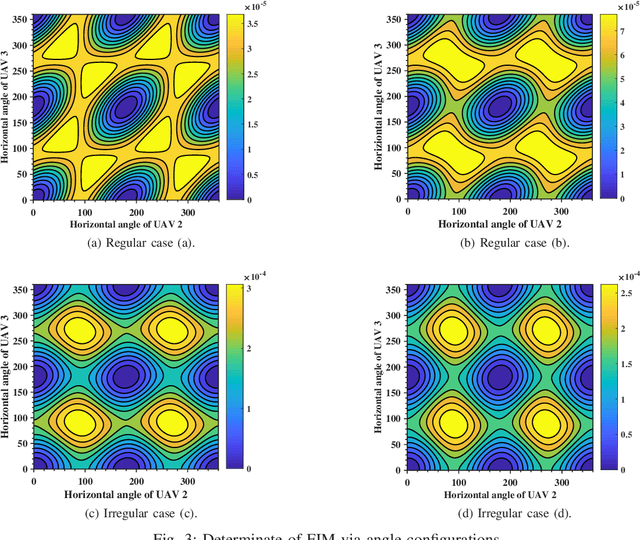
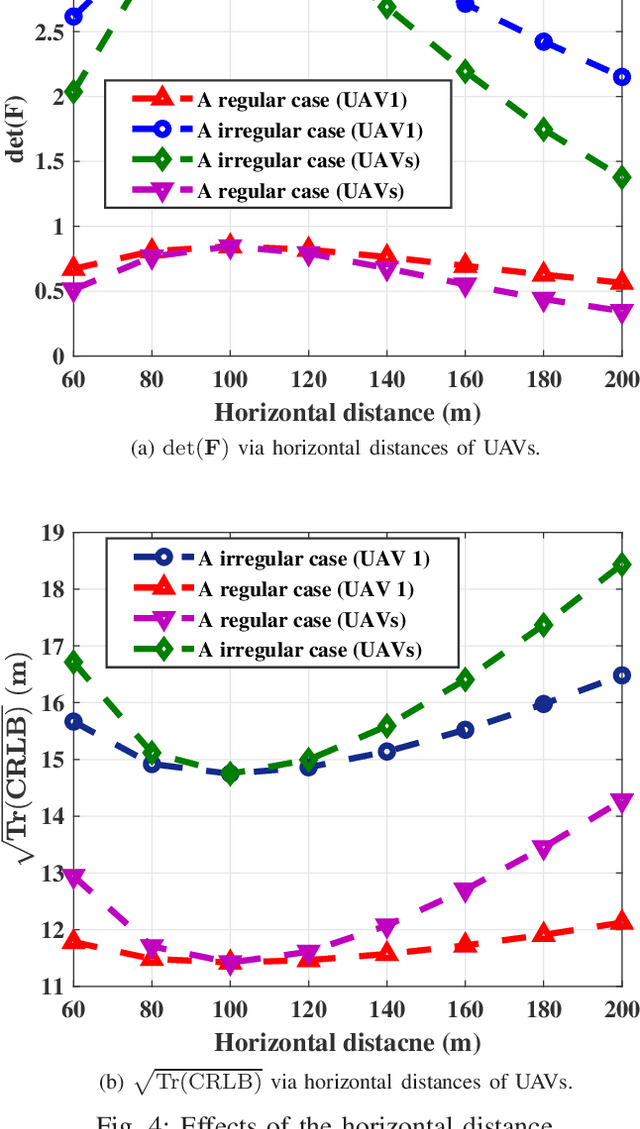
Passive geolocation by multiple unmanned aerial vehicles (UAVs) covers a wide range of military and civilian applications including rescue, wild life tracking and electronic warfare. The sensor-target geometry is known to significantly affect the localization precision. The existing sensor placement strategies mainly work on the cases without any constraints on the sensors locations. However, UAVs cannot fly/hover simply in arbitrary region due to realistic constraints, such as the geographical limitations, the security issues, and the max flying speed. In this paper, optimal geometrical configurations of UAVs in received signal strength (RSS)-based localization under region constraints are investigated. Employing the D-optimal criteria, i.e., minimizing the determinate of Fisher information matrix (FIM), such optimal problem is formulated. Based on the rigorous algebra and geometrical derivations, optimal and also closed form configurations of UAVs under different flying states are proposed. Finally, the effectiveness and practicality of the proposed configurations are demonstrated by simulation examples.
Low-complexity Joint Phase Adjustment and Receive Beamforming for Directional Modulation Networks via IRS
Jul 11, 2022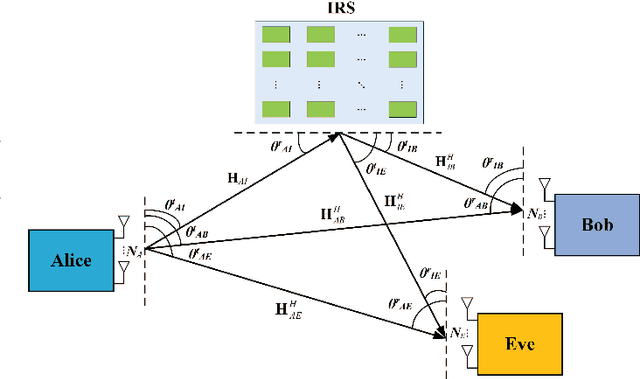
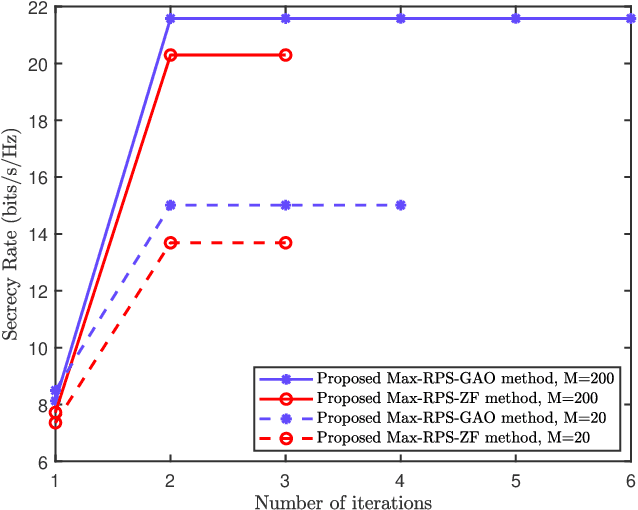
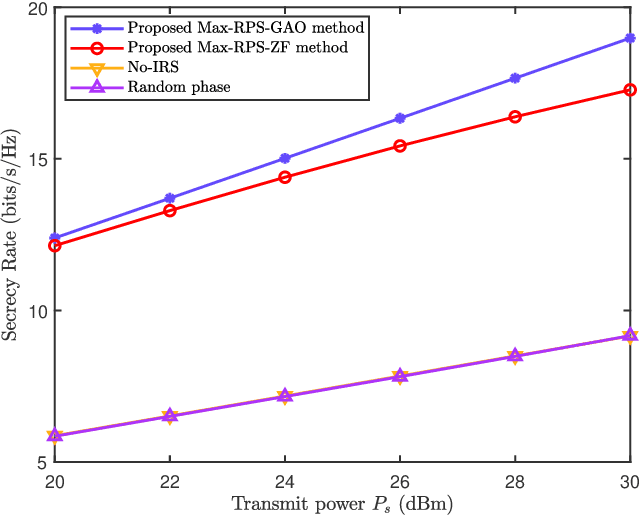
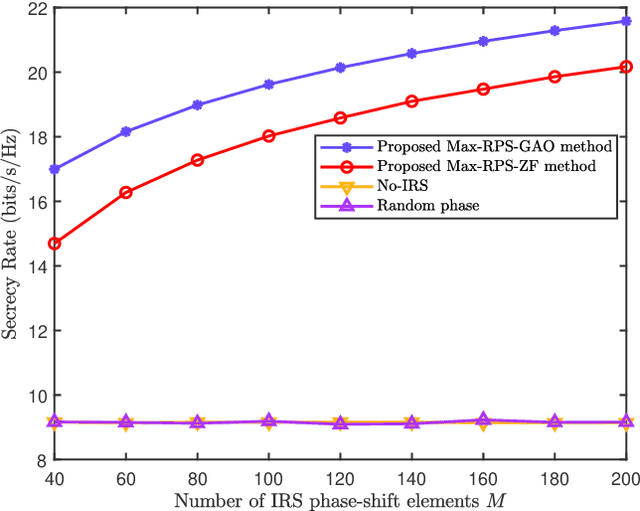
Intelligent reflecting surface (IRS) is a revolutionary and low-cost technology for boosting the spectrum and energy efficiencies in future wireless communication network. In order to create controllable multipath transmission in the conventional line-of-sight (LOS) wireless communication environment, an IRS-aided directional modulation (DM) network is considered. In this paper, to improve the transmission security of the system and maximize the receive power sum (Max-RPS), two alternately optimizing schemes of jointly designing receive beamforming (RBF) vectors and IRS phase shift matrix (PSM) are proposed: Max-RPS using general alternating optimization (Max-RPS-GAO) algorithm and Max-RPS using zero-forcing (Max-RPS-ZF) algorithm. Simulation results show that, compared with the no-IRS-assisted scheme and the no-PSM optimization scheme, the proposed IRS-assisted Max-RPS-GAO method and Max-RPS-ZF method can significantly improve the secrecy rate (SR) performance of the DM system. Moreover, compared with the Max-RPS-GAO method, the proposed Max-RPS-ZF method has a faster convergence speed and a certain lower computational complexity.
Providing Location Information at Edge Networks: A Federated Learning-Based Approach
May 17, 2022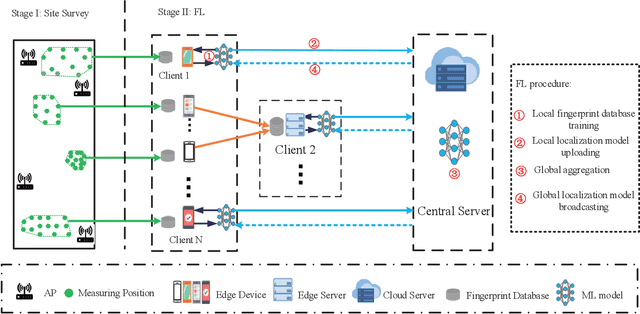
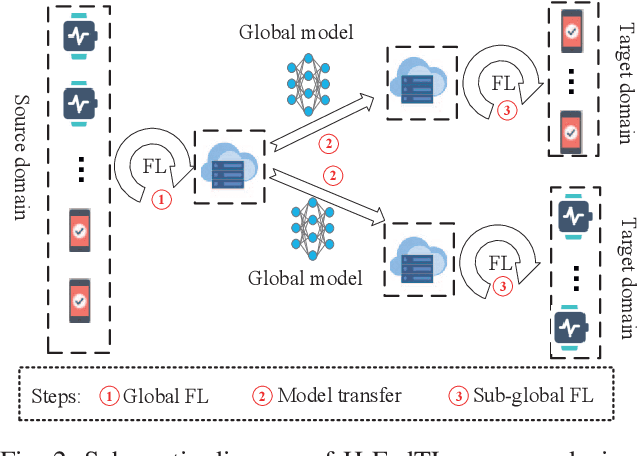
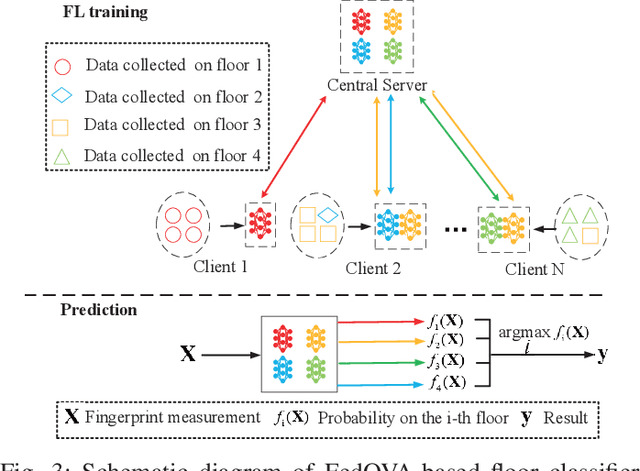
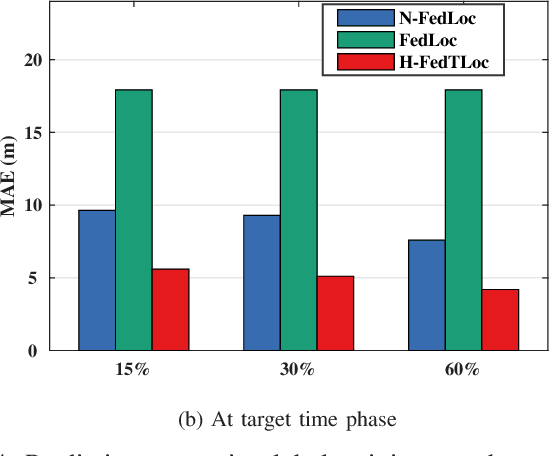
Recently, the development of mobile edge computing has enabled exhilarating edge artificial intelligence (AI) with fast response and low communication cost. The location information of edge devices is essential to support the edge AI in many scenarios, like smart home, intelligent transportation systems and integrated health care. Taking advantages of deep learning intelligence, the centralized machine learning (ML)-based positioning technique has received heated attention from both academia and industry. However, some potential issues, such as location information leakage and huge data traffic, limit its application. Fortunately, a newly emerging privacy-preserving distributed ML mechanism, named federated learning (FL), is expected to alleviate these concerns. In this article, we illustrate a framework of FL-based localization system as well as the involved entities at edge networks. Moreover, the advantages of such system are elaborated. On practical implementation of it, we investigate the field-specific issues associated with system-level solutions, which are further demonstrated over a real-word database. Moreover, future challenging open problems in this field are outlined.
A Rapid Power-iterative Root-MUSIC Estimator for Massive/Ultra-massive MIMO Receiver
May 16, 2022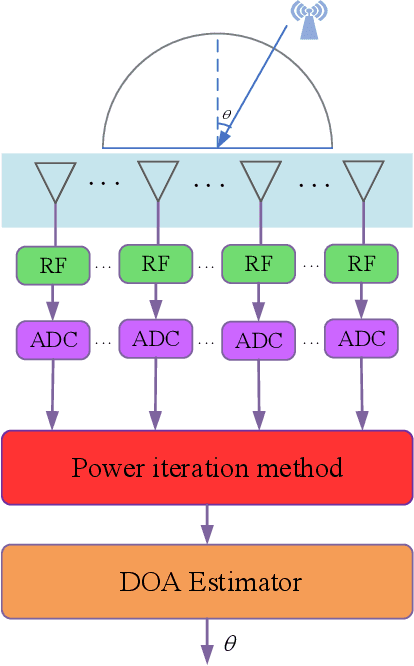
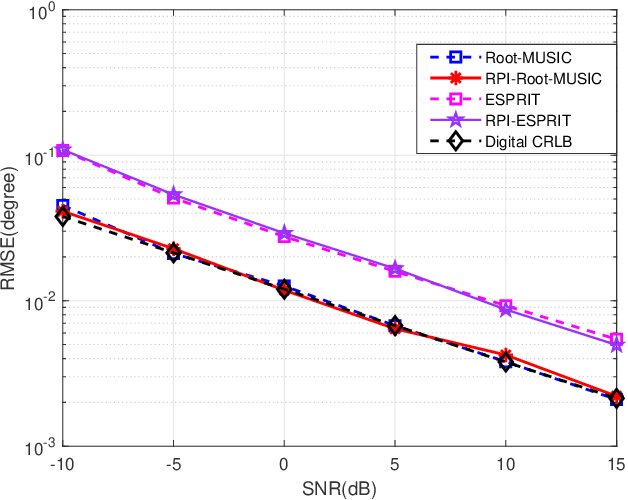
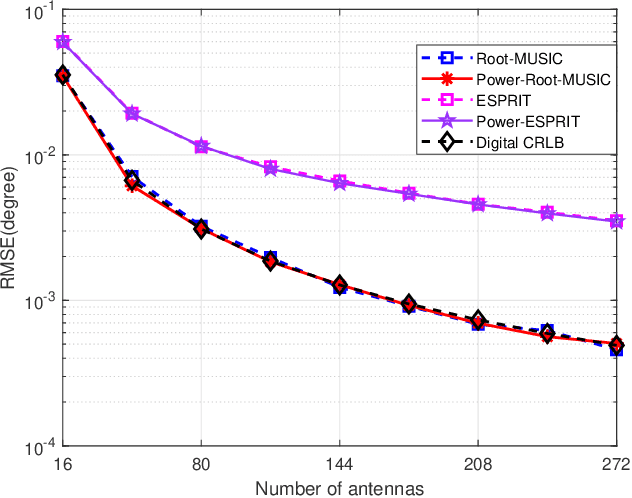
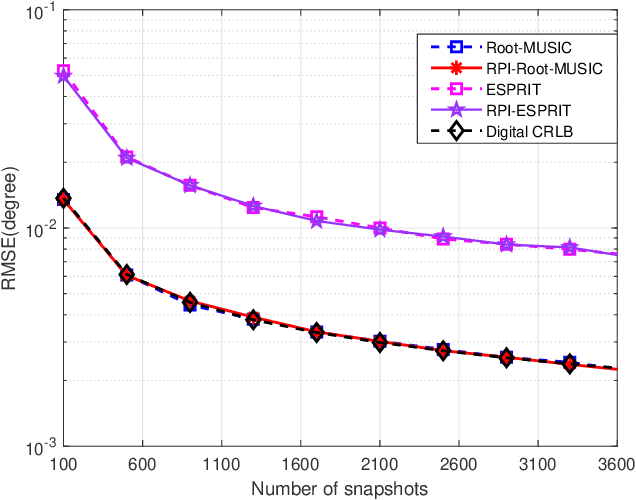
For a passive direction of arrival (DOA) measurement system using massive multiple input multiple output (MIMO), the complexity of the covariance matrix decompositionbased DOA measurement method is extremely high. To significantly reduce the computational complexity, two strategies are proposed. Firstly, a rapid power-iterative estimation of signal parameters via rotational invariance technique (RPI-ESPRIT) method is proposed, which not only reduces the complexity but also achieves good directional measurement results. However, the general complexity is still high. In order to further the complexity, a rapid power-iterative root Multiple Signal Classification (RPIRoot-MUSIC) method is proposed. Simulation results show that the two proposed methods outperform the classical DOA estimation method in terms of computational complexity. In particular, the lowest complexity achieved by the RPI-Root-MUSIC method is about two-order-magnitude lower than that of Root-MUSIC in terms of FLOP. In addition, it is verified that the initial vector and relative error have a substantial effect on the performance of computational complexity.