 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransMPC: Transformer-based Explicit MPC with Variable Prediction Horizon
Sep 09, 2025
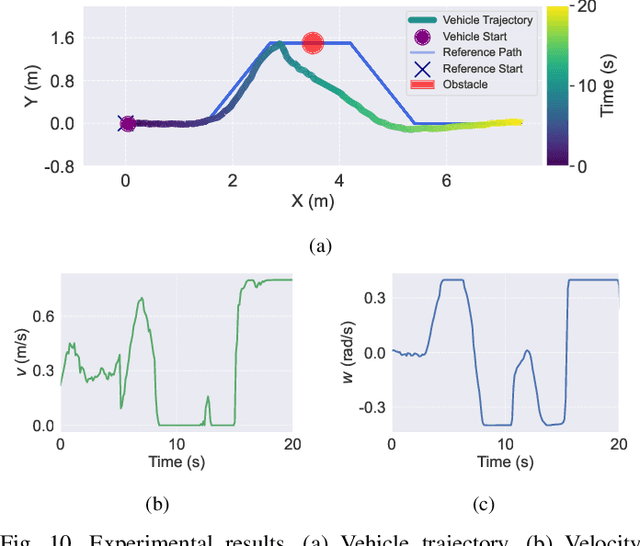
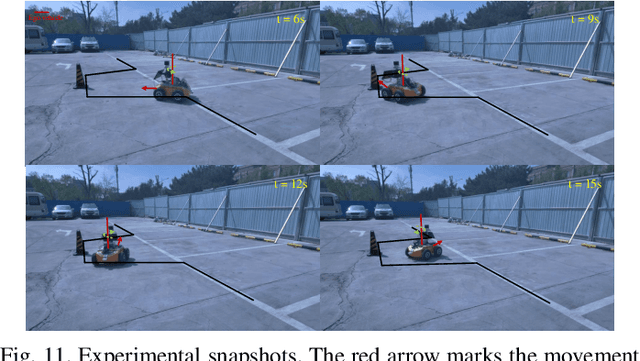
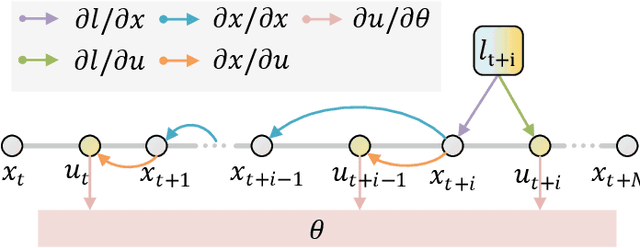
Traditional online Model Predictive Control (MPC) methods often suffer from excessive computational complexity, limiting their practical deployment. Explicit MPC mitigates online computational load by pre-computing control policies offline; however, existing explicit MPC methods typically rely on simplified system dynamics and cost functions, restricting their accuracy for complex systems. This paper proposes TransMPC, a novel Transformer-based explicit MPC algorithm capable of generating highly accurate control sequences in real-time for complex dynamic systems. Specifically, we formulate the MPC policy as an encoder-only Transformer leveraging bidirectional self-attention, enabling simultaneous inference of entire control sequences in a single forward pass. This design inherently accommodates variable prediction horizons while ensuring low inference latency. Furthermore, we introduce a direct policy optimization framework that alternates between sampling and learning phases. Unlike imitation-based approaches dependent on precomputed optimal trajectories, TransMPC directly optimizes the true finite-horizon cost via automatic differentiation. Random horizon sampling combined with a replay buffer provides independent and identically distributed (i.i.d.) training samples, ensuring robust generalization across varying states and horizon lengths. Extensive simulations and real-world vehicle control experiments validate the effectiveness of TransMPC in terms of solution accuracy, adaptability to varying horizons, and computational efficiency.
Encoding Distributional Soft Actor-Critic for Autonomous Driving in Multi-lane Scenarios
Sep 12, 2021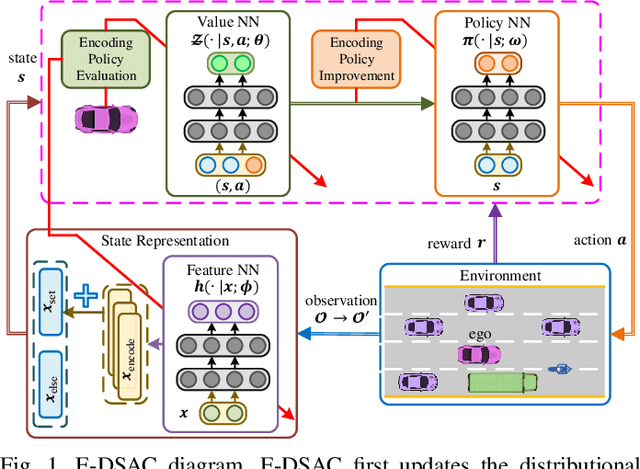
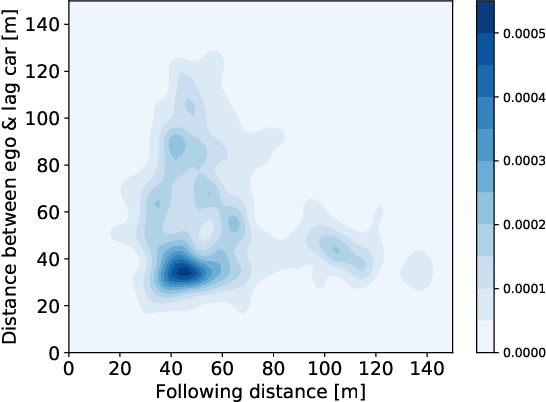
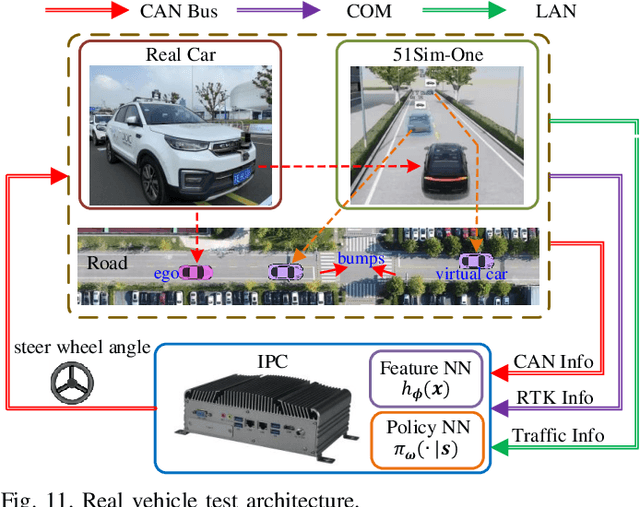
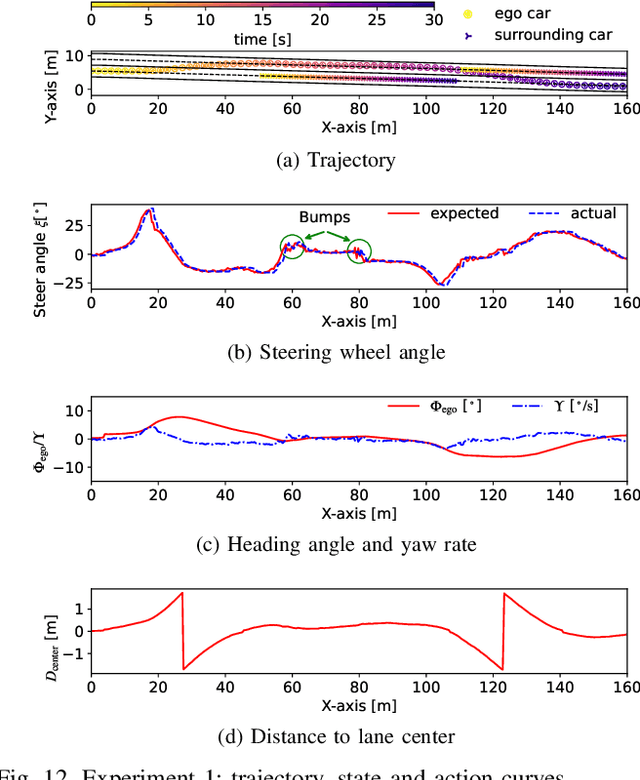
In this paper, we propose a new reinforcement learning (RL) algorithm, called encoding distributional soft actor-critic (E-DSAC), for decision-making in autonomous driving. Unlike existing RL-based decision-making methods, E-DSAC is suitable for situations where the number of surrounding vehicles is variable and eliminates the requirement for manually pre-designed sorting rules, resulting in higher policy performance and generality. We first develop an encoding distributional policy iteration (DPI) framework by embedding a permutation invariant module, which employs a feature neural network (NN) to encode the indicators of each vehicle, in the distributional RL framework. The proposed DPI framework is proved to exhibit important properties in terms of convergence and global optimality. Next, based on the developed encoding DPI framework, we propose the E-DSAC algorithm by adding the gradient-based update rule of the feature NN to the policy evaluation process of the DSAC algorithm. Then, the multi-lane driving task and the corresponding reward function are designed to verify the effectiveness of the proposed algorithm. Results show that the policy learned by E-DSAC can realize efficient, smooth, and relatively safe autonomous driving in the designed scenario. And the final policy performance learned by E-DSAC is about three times that of DSAC. Furthermore, its effectiveness has also been verified in real vehicle experiments.