 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransMPC: Transformer-based Explicit MPC with Variable Prediction Horizon
Sep 09, 2025
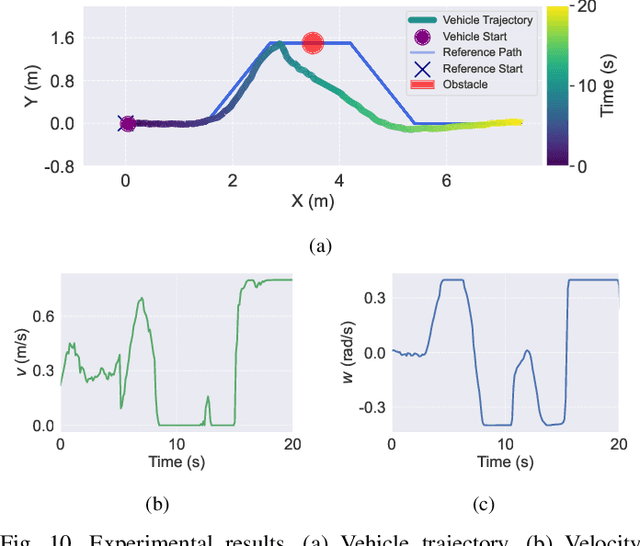
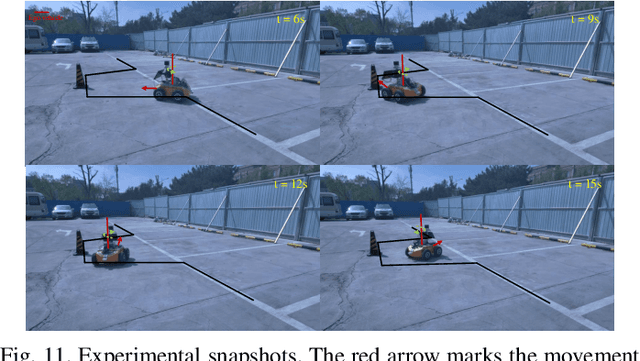
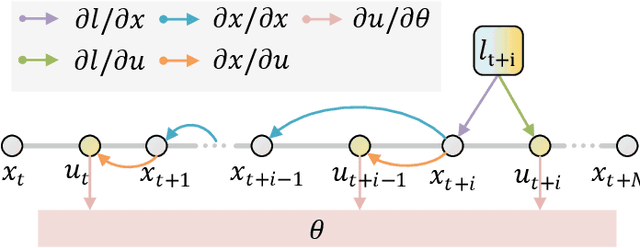
Traditional online Model Predictive Control (MPC) methods often suffer from excessive computational complexity, limiting their practical deployment. Explicit MPC mitigates online computational load by pre-computing control policies offline; however, existing explicit MPC methods typically rely on simplified system dynamics and cost functions, restricting their accuracy for complex systems. This paper proposes TransMPC, a novel Transformer-based explicit MPC algorithm capable of generating highly accurate control sequences in real-time for complex dynamic systems. Specifically, we formulate the MPC policy as an encoder-only Transformer leveraging bidirectional self-attention, enabling simultaneous inference of entire control sequences in a single forward pass. This design inherently accommodates variable prediction horizons while ensuring low inference latency. Furthermore, we introduce a direct policy optimization framework that alternates between sampling and learning phases. Unlike imitation-based approaches dependent on precomputed optimal trajectories, TransMPC directly optimizes the true finite-horizon cost via automatic differentiation. Random horizon sampling combined with a replay buffer provides independent and identically distributed (i.i.d.) training samples, ensuring robust generalization across varying states and horizon lengths. Extensive simulations and real-world vehicle control experiments validate the effectiveness of TransMPC in terms of solution accuracy, adaptability to varying horizons, and computational efficiency.
FuXi-Air: Urban Air Quality Forecasting Based on Emission-Meteorology-Pollutant multimodal Machine Learning
Jun 09, 2025Air pollution has emerged as a major public health challenge in megacities. Numerical simulations and single-site machine learning approaches have been widely applied in air quality forecasting tasks. However, these methods face multiple limitations, including high computational costs, low operational efficiency, and limited integration with observational data. With the rapid advancement of artificial intelligence, there is an urgent need to develop a low-cost, efficient air quality forecasting model for smart urban management. An air quality forecasting model, named FuXi-Air, has been constructed in this study based on multimodal data fusion to support high-precision air quality forecasting and operated in typical megacities. The model integrates meteorological forecasts, emission inventories, and pollutant monitoring data under the guidance of air pollution mechanism. By combining an autoregressive prediction framework with a frame interpolation strategy, the model successfully completes 72-hour forecasts for six major air pollutants at an hourly resolution across multiple monitoring sites within 25-30 seconds. In terms of both computational efficiency and forecasting accuracy, it outperforms the mainstream numerical air quality models in operational forecasting work. Ablation experiments concerning key influencing factors show that although meteorological data contribute more to model accuracy than emission inventories do, the integration of multimodal data significantly improves forecasting precision and ensures that reliable predictions are obtained under differing pollution mechanisms across megacities. This study provides both a technical reference and a practical example for applying multimodal data-driven models to air quality forecasting and offers new insights into building hybrid forecasting systems to support air pollution risk warning in smart city management.