 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransMPC: Transformer-based Explicit MPC with Variable Prediction Horizon
Sep 09, 2025
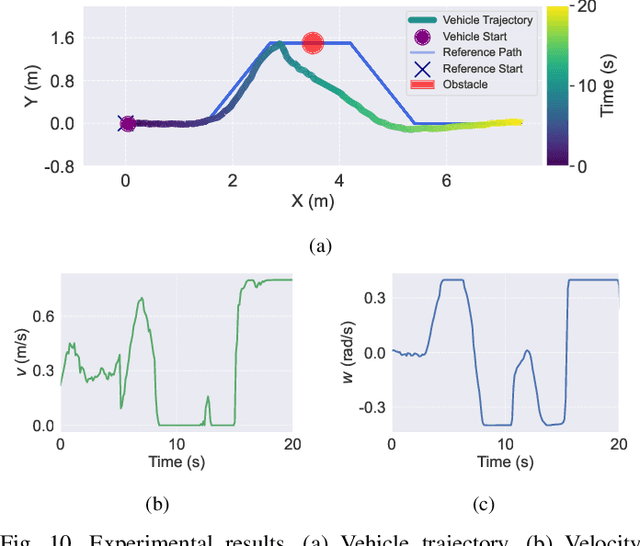
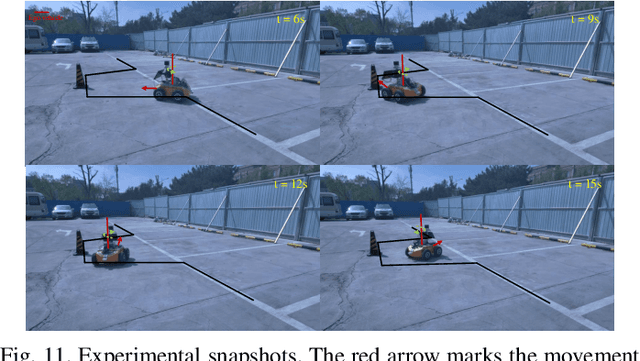
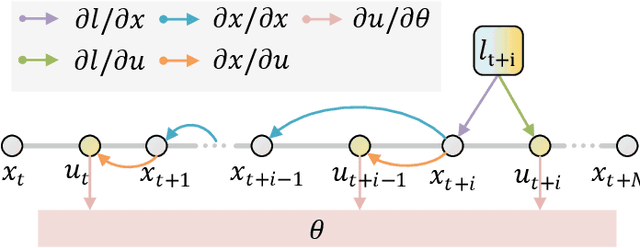
Traditional online Model Predictive Control (MPC) methods often suffer from excessive computational complexity, limiting their practical deployment. Explicit MPC mitigates online computational load by pre-computing control policies offline; however, existing explicit MPC methods typically rely on simplified system dynamics and cost functions, restricting their accuracy for complex systems. This paper proposes TransMPC, a novel Transformer-based explicit MPC algorithm capable of generating highly accurate control sequences in real-time for complex dynamic systems. Specifically, we formulate the MPC policy as an encoder-only Transformer leveraging bidirectional self-attention, enabling simultaneous inference of entire control sequences in a single forward pass. This design inherently accommodates variable prediction horizons while ensuring low inference latency. Furthermore, we introduce a direct policy optimization framework that alternates between sampling and learning phases. Unlike imitation-based approaches dependent on precomputed optimal trajectories, TransMPC directly optimizes the true finite-horizon cost via automatic differentiation. Random horizon sampling combined with a replay buffer provides independent and identically distributed (i.i.d.) training samples, ensuring robust generalization across varying states and horizon lengths. Extensive simulations and real-world vehicle control experiments validate the effectiveness of TransMPC in terms of solution accuracy, adaptability to varying horizons, and computational efficiency.
Efficient Tensor Contraction via Fast Count Sketch
Jun 24, 2021
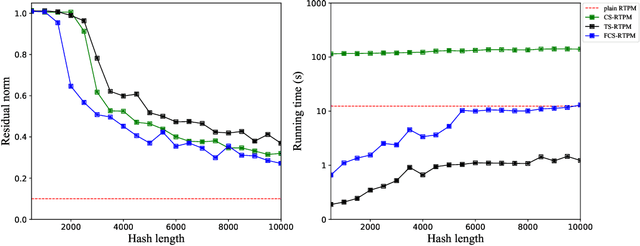

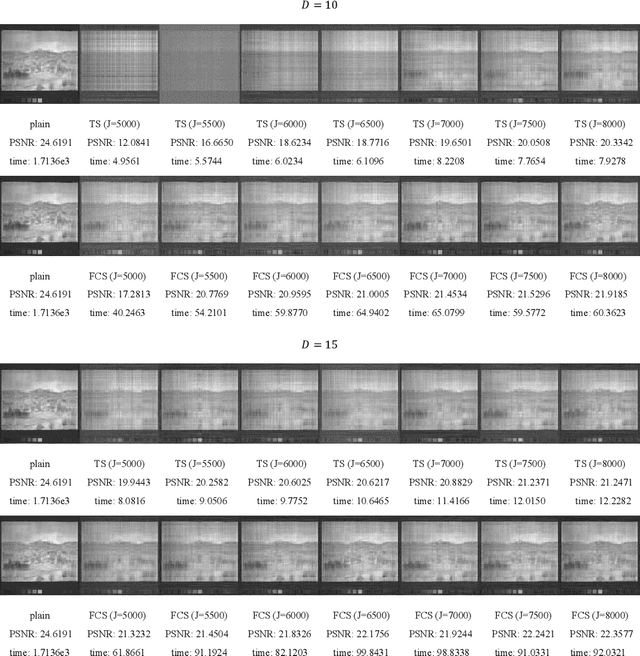
Sketching uses randomized Hash functions for dimensionality reduction and acceleration. The existing sketching methods, such as count sketch (CS), tensor sketch (TS), and higher-order count sketch (HCS), either suffer from low accuracy or slow speed in some tensor based applications. In this paper, the proposed fast count sketch (FCS) applies multiple shorter Hash functions based CS to the vector form of the input tensor, which is more accurate than TS since the spatial information of the input tensor can be preserved more sufficiently. When the input tensor admits CANDECOMP/PARAFAC decomposition (CPD), FCS can accelerate CS and HCS by using fast Fourier transform, which exhibits a computational complexity asymptotically identical to TS for low-order tensors. The effectiveness of FCS is validated by CPD, tensor regression network compression, and Kronecker product compression. Experimental results show its superior performance in terms of approximation accuracy and computational efficiency.
Scalable Deep Compressive Sensing
Jan 22, 2021
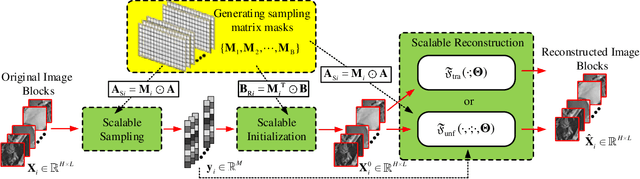
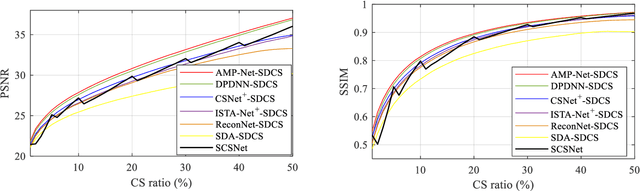
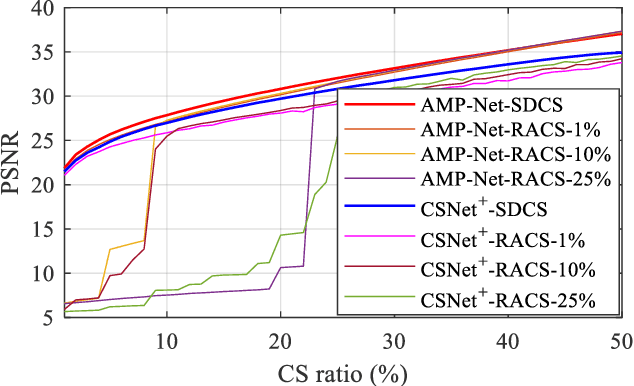
Deep learning has been used to image compressive sensing (CS) for enhanced reconstruction performance. However, most existing deep learning methods train different models for different subsampling ratios, which brings additional hardware burden. In this paper, we develop a general framework named scalable deep compressive sensing (SDCS) for the scalable sampling and reconstruction (SSR) of all existing end-to-end-trained models. In the proposed way, images are measured and initialized linearly. Two sampling masks are introduced to flexibly control the subsampling ratios used in sampling and reconstruction, respectively. To make the reconstruction model adapt to any subsampling ratio, a training strategy dubbed scalable training is developed. In scalable training, the model is trained with the sampling matrix and the initialization matrix at various subsampling ratios by integrating different sampling matrix masks. Experimental results show that models with SDCS can achieve SSR without changing their structure while maintaining good performance, and SDCS outperforms other SSR methods.