 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePreprocessing-based Kinodynamic Motion Planning Framework for Intercepting Projectiles using a Robot Manipulator
Jan 16, 2024



We are interested in studying sports with robots and starting with the problem of intercepting a projectile moving toward a robot manipulator equipped with a shield. To successfully perform this task, the robot needs to (i) detect the incoming projectile, (ii) predict the projectile's future motion, (iii) plan a minimum-time rapid trajectory that can evade obstacles and intercept the projectile, and (iv) execute the planned trajectory. These four steps must be performed under the manipulator's dynamic limits and extreme time constraints (<350ms in our setting) to successfully intercept the projectile. In addition, we want these trajectories to be smooth to reduce the robot's joint torques and the impulse on the platform on which it is mounted. To this end, we propose a kinodynamic motion planning framework that preprocesses smooth trajectories offline to allow real-time collision-free executions online. We present an end-to-end pipeline along with our planning framework, including perception, prediction, and execution modules. We evaluate our framework experimentally in simulation and show that it has a higher blocking success rate than the baselines. Further, we deploy our pipeline on a robotic system comprising an industrial arm (ABB IRB-1600) and an onboard stereo camera (ZED 2i), which achieves a 78% success rate in projectile interceptions.
Provably Constant-time Planning and Replanning for Real-time Grasping Objects off a Conveyor Belt
Jan 15, 2021
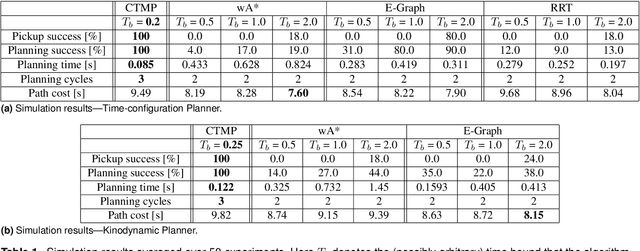
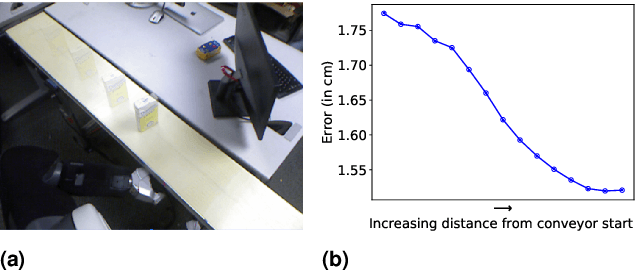
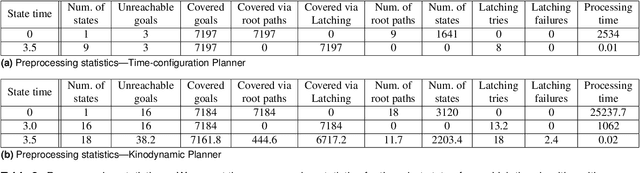
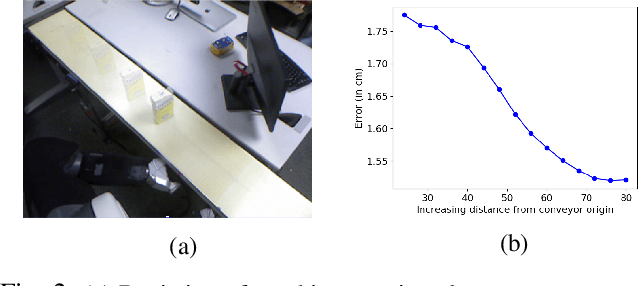
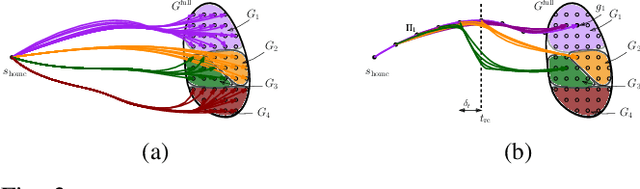
In warehouse and manufacturing environments, manipulation platforms are frequently deployed at conveyor belts to perform pick and place tasks. Because objects on the conveyor belts are moving, robots have limited time to pick them up. This brings the requirement for fast and reliable motion planners that could provide provable real-time planning guarantees, which the existing algorithms do not provide. Besides the planning efficiency, the success of manipulation tasks relies heavily on the accuracy of the perception system which is often noisy, especially if the target objects are perceived from a distance. For fast moving conveyor belts, the robot cannot wait for a perfect estimate before it starts executing its motion. In order to be able to reach the object in time, it must start moving early on (relying on the initial noisy estimates) and adjust its motion on-the-fly in response to the pose updates from perception. We propose a planning framework that meets these requirements by providing provable constant-time planning and replanning guarantees. To this end, we first introduce and formalize a new class of algorithms called Constant-Time Motion Planning algorithms (CTMP) that guarantee to plan in constant time and within a user-defined time bound. We then present our planning framework for grasping objects off a conveyor belt as an instance of the CTMP class of algorithms.
Alternative Paths Planner (APP) for Provably Fixed-time Manipulation Planning in Semi-structured Environments
Dec 29, 2020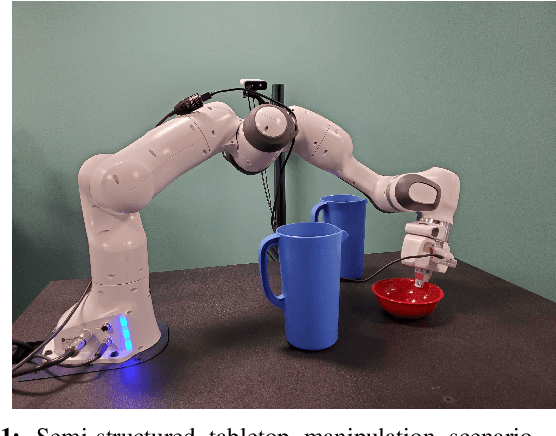
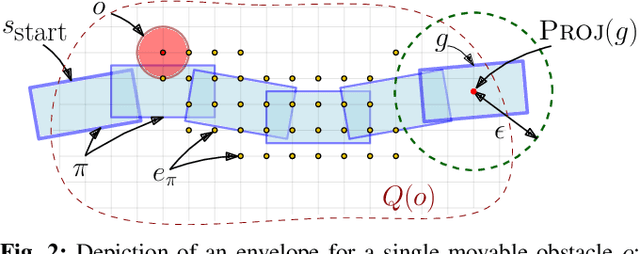
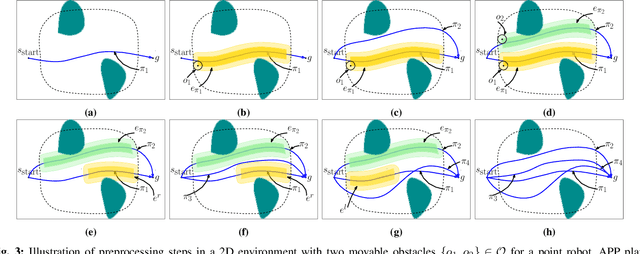
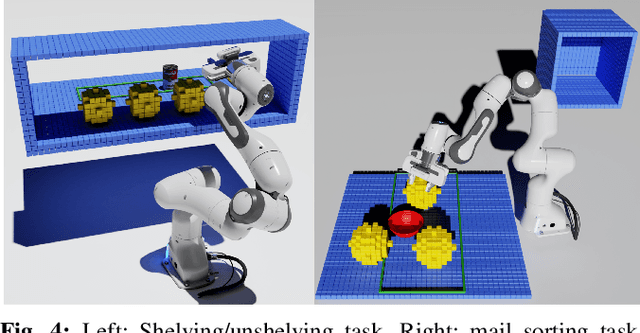
In many applications, including logistics and manufacturing, robot manipulators operate in semi-structured environments alongside humans or other robots. These environments are largely static, but they may contain some movable obstacles that the robot must avoid. Manipulation tasks in these applications are often highly repetitive, but require fast and reliable motion planning capabilities, often under strict time constraints. Existing preprocessing-based approaches are beneficial when the environments are highly-structured, but their performance degrades in the presence of movable obstacles, since these are not modelled a priori. We propose a novel preprocessing-based method called Alternative Paths Planner (APP) that provides provably fixed-time planning guarantees in semi-structured environments. APP plans a set of alternative paths offline such that, for any configuration of the movable obstacles, at least one of the paths from this set is collision-free. During online execution, a collision-free path can be looked up efficiently within a few microseconds. We evaluate APP on a 7 DoF robot arm in semi-structured domains of varying complexity and demonstrate that APP is several orders of magnitude faster than state-of-the-art motion planners for each domain. We further validate this approach with real-time experiments on a robotic manipulator.
Multi-Resolution A*
Apr 14, 2020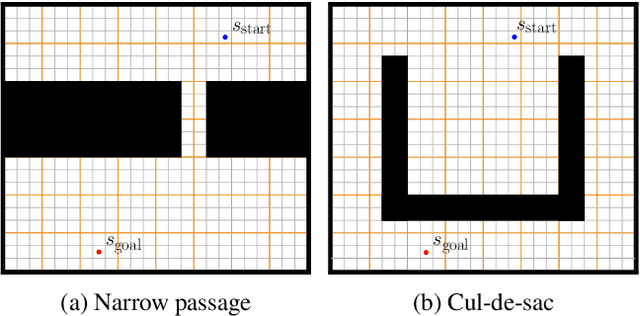
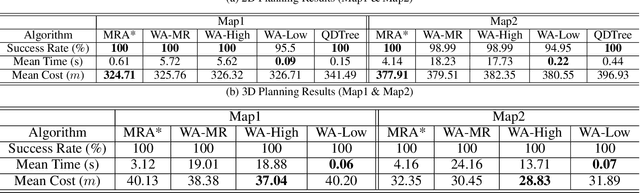
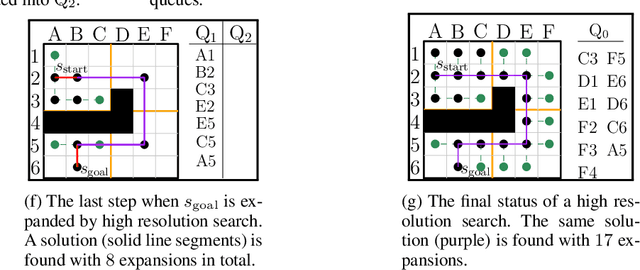
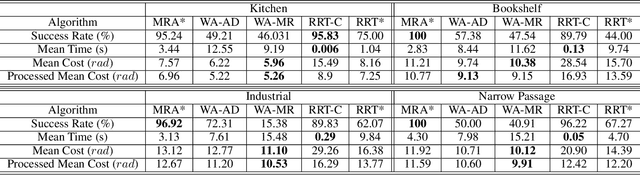
Heuristic search-based planning techniques are commonly used for motion planning on discretized spaces. The performance of these algorithms is heavily affected by the resolution at which the search space is discretized. Typically a fixed resolution is chosen for a given domain. While a finer resolution allows for better maneuverability, it significantly increases the size of the state space, and hence demands more search efforts. On the contrary, a coarser resolution gives a fast exploratory behavior but compromises on maneuverability and the completeness of the search. To effectively leverage the advantages of both high and low resolution discretizations, we propose Multi-Resolution A* (MRA*) algorithm, that runs multiple weighted-A*(WA*) searches having different resolution levels simultaneously and combines the strengths of all of them. In addition to these searches, MRA* uses one anchor search to control expansions from these searches. We show that MRA* is bounded suboptimal with respect to the anchor resolution search space and resolution complete. We performed experiments on several motion planning domains including 2D, 3D grid planning and 7 DOF manipulation planning and compared our approach with several search-based and sampling-based baselines.
Provably Constant-Time Planning and Re-planning for Real-time Grasping Objects off a Conveyor
Mar 19, 2020

In warehousing and manufacturing environments, manipulation platforms are frequently deployed at conveyor belts to perform pick and place tasks. Because objects on the conveyor belts are moving, robots have limited time to pick them up. This brings the requirement for fast and reliable motion planners that could provide provable real-time planning guarantees, which the existing algorithms do not provide. Besides the planning efficiency, the success of manipulation tasks relies heavily on the accuracy of the perception system which often is noisy, especially if the target objects are perceived from a distance. For fast moving conveyor belts, the robot cannot wait for a perfect estimate before it starts execution. In order to be able to reach the object in time it must start moving early on (relying on the initial noisy estimates) and adjust its motion on-the-fly in response to the pose updates from perception. We propose an approach that meets these requirements by providing provable constant-time planning and replanning guarantees. We present it, give its analytical properties and show experimental analysis in simulation and on a real robot.
Planning, Learning and Reasoning Framework for Robot Truck Unloading
Oct 21, 2019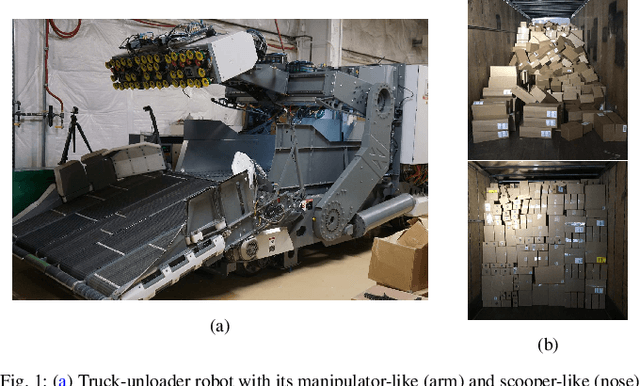
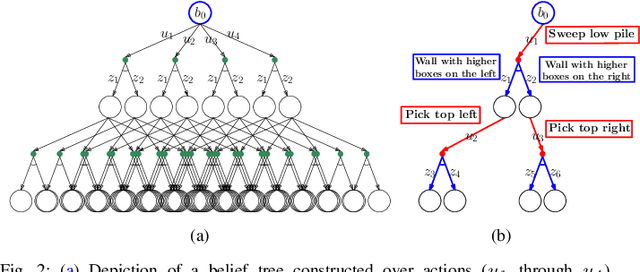
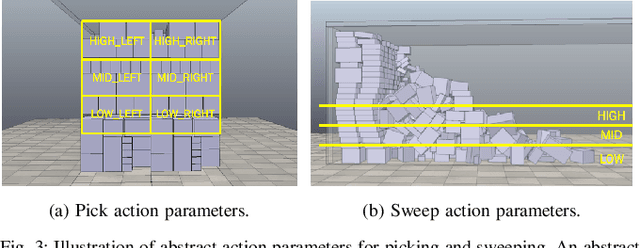
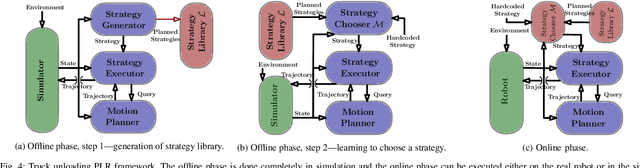
We consider the task of autonomously unloading boxes from trucks using an industrial manipulator robot. There are multiple challenges that arise: (1) real-time motion planning for a complex robotic system carrying two articulated mechanisms, an arm and a scooper, (2) decision-making in terms of what action to execute next given imperfect information about boxes such as their masses, (3) accounting for the sequential nature of the problem where current actions affect future state of the boxes, and (4) real-time execution that interleaves high-level decision-making with lower level motion planning. In this work, we propose a planning, learning, and reasoning framework to tackle these challenges, and describe its components including motion planning, belief space planning for offline learning, online decision-making based on offline learning, and an execution module to combine decision-making with motion planning. We analyze the performance of the framework on real-world scenarios. In particular, motion planning and execution modules are evaluated in simulation and on a real robot, while offline learning and online decision-making are evaluated in simulated real-world scenarios.
Provable Indefinite-Horizon Real-Time Planning for Repetitive Tasks
Apr 11, 2019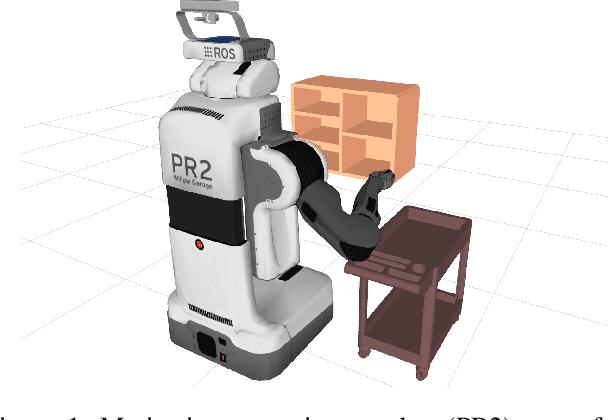

In many robotic manipulation scenarios, robots often have to perform highly-repetitive tasks in structured environments e.g. sorting mail in a mailroom or pick and place objects on a conveyor belt. In this work we are interested in settings where the tasks are similar, yet not identical (e.g., due to uncertain orientation of objects) and motion planning needs to be extremely fast. Preprocessing-based approaches prove to be very beneficial in these settings. They analyze the configuration-space offline to generate some auxiliary information which can then be used in the query phase to speedup planning times. Typically, the tighter the requirement is on query times the larger the memory footprint will be. In particular, for high-dimensional spaces, providing real-time planning capabilities is extremely challenging. While there are planners that guarantee real-time performance by limiting the planning horizon, we are not aware of general-purpose planners capable of doing it for indefinite horizon (i.e., planning to the goal). To this end, we propose a preprocessing-based method that provides provable bounds on the query time while incurring only a small amount of memory overhead in the query phase. We evaluate our method on a 7-DOF robot arm and show a speedup of over tenfold in query time when compared to the PRM algorithm.
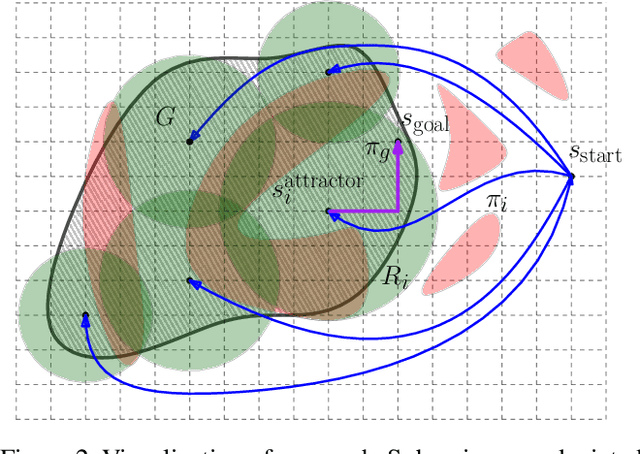
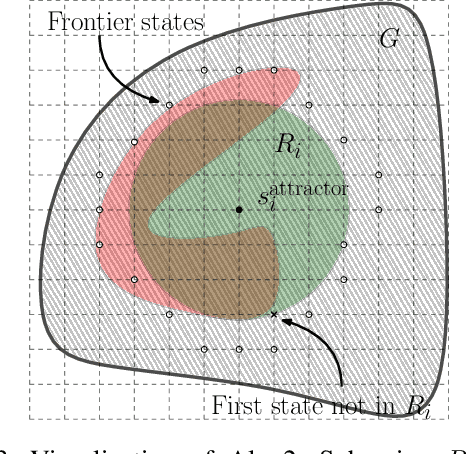
Online, interactive user guidance for high-dimensional, constrained motion planning
Jul 20, 2018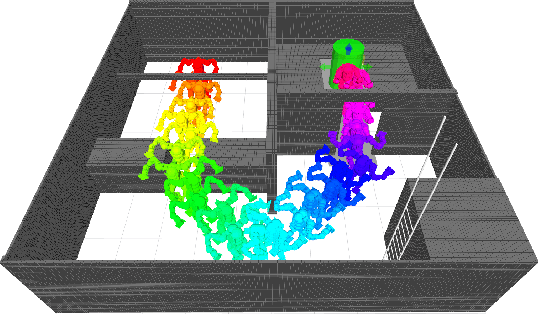
We consider the problem of planning a collision-free path for a high-dimensional robot. Specifically, we suggest a planning framework where a motion-planning algorithm can obtain guidance from a user. In contrast to existing approaches that try to speed up planning by incorporating experiences or demonstrations ahead of planning, we suggest to seek user guidance only when the planner identifies that it ceases to make significant progress towards the goal. Guidance is provided in the form of an intermediate configuration $\hat{q}$, which is used to bias the planner to go through $\hat{q}$. We demonstrate our approach for the case where the planning algorithm is Multi-Heuristic A* (MHA*) and the robot is a 34-DOF humanoid. We show that our approach allows to compute highly-constrained paths with little domain knowledge. Without our approach, solving such problems requires carefully-crafting domain-dependent heuristics.
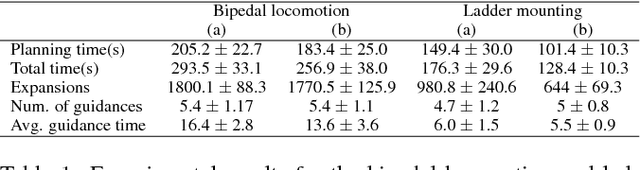
A Single-Planner Approach to Multi-Modal Humanoid Mobility
Jan 30, 2018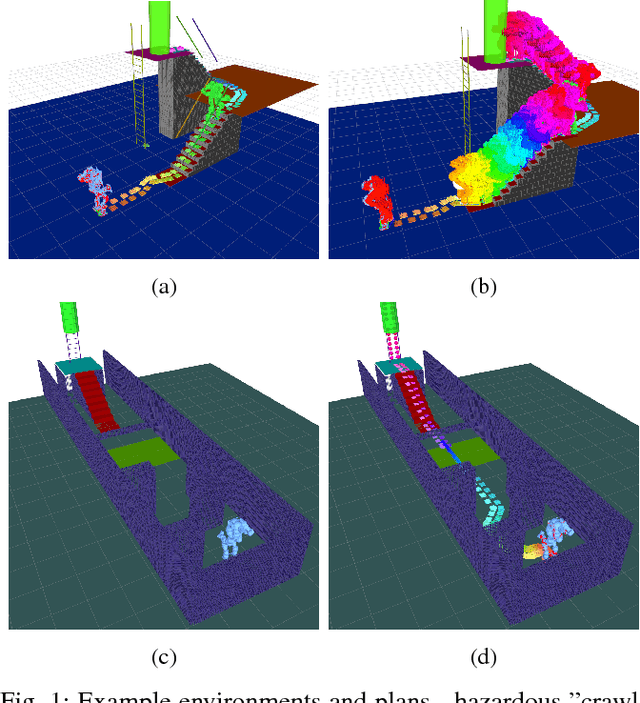
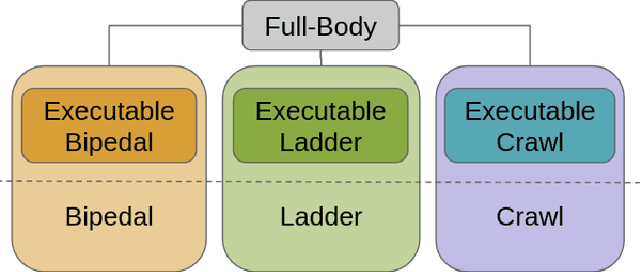
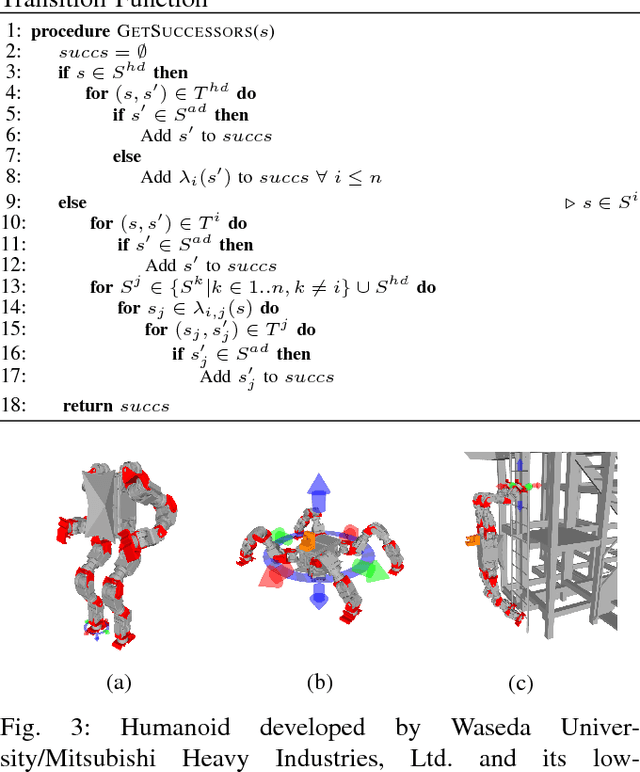
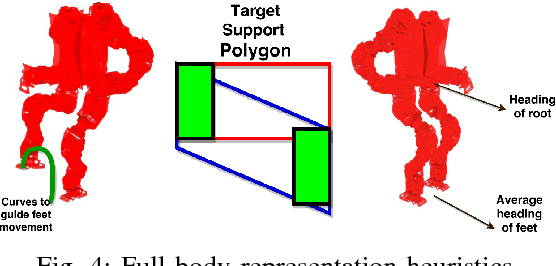
In this work, we present an approach to planning for humanoid mobility. Humanoid mobility is a challenging problem, as the configuration space for a humanoid robot is intractably large, especially if the robot is capable of performing many types of locomotion. For example, a humanoid robot may be able to perform such tasks as bipedal walking, crawling, and climbing. Our approach is to plan for all these tasks within a single search process. This allows the search to reason about all the capabilities of the robot at any point, and to derive the complete solution such that the plan is guaranteed to be feasible. A key observation is that we often can roughly decompose a mobility task into a sequence of smaller tasks, and focus planning efforts to reason over much smaller search spaces. To this end, we leverage the results of a recently developed framework for planning with adaptive dimensionality, and incorporate the capabilities of available controllers directly into the planning process. The resulting planner can also be run in an interleaved fashion alongside execution so that time spent idle is much reduced.