 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA-MHA*: Anytime Multi-Heuristic A*
Aug 29, 2025Designing good heuristic functions for graph search requires adequate domain knowledge. It is often easy to design heuristics that perform well and correlate with the underlying true cost-to-go values in certain parts of the search space but these may not be admissible throughout the domain thereby affecting the optimality guarantees of the search. Bounded suboptimal search using several such partially good but inadmissible heuristics was developed in Multi-Heuristic A* (MHA*). Although MHA* leverages multiple inadmissible heuristics to potentially generate a faster suboptimal solution, the original version does not improve the solution over time. It is a one shot algorithm that requires careful setting of inflation factors to obtain a desired one time solution. In this work, we tackle this issue by extending MHA* to an anytime version that finds a feasible suboptimal solution quickly and continually improves it until time runs out. Our work is inspired from the Anytime Repairing A* (ARA*) algorithm. We prove that our precise adaptation of ARA* concepts in the MHA* framework preserves the original suboptimal and completeness guarantees and enhances MHA* to perform in an anytime fashion. Furthermore, we report the performance of A-MHA* in 3-D path planning domain and sliding tiles puzzle and compare against MHA* and other anytime algorithms.
Implicit Graph Search for Planning on Graphs of Convex Sets
Oct 11, 2024



Graphs of Convex Sets (GCS) is a recent method for synthesizing smooth trajectories by decomposing the planning space into convex sets, forming a graph to encode the adjacency relationships within the decomposition, and then simultaneously searching this graph and optimizing parts of the trajectory to obtain the final trajectory. To do this, one must solve a Mixed Integer Convex Program (MICP) and to mitigate computational time, GCS proposes a convex relaxation that is empirically very tight. Despite this tight relaxation, motion planning with GCS for real-world robotics problems translates to solving the simultaneous batch optimization problem that may contain millions of constraints and therefore can be slow. This is further exacerbated by the fact that the size of the GCS problem is invariant to the planning query. Motivated by the observation that the trajectory solution lies only on a fraction of the set of convex sets, we present two implicit graph search methods for planning on the graph of convex sets called INSATxGCS (IxG) and IxG*. INterleaved Search And Trajectory optimization (INSAT) is a previously developed algorithm that alternates between searching on a graph and optimizing partial paths to find a smooth trajectory. By using an implicit graph search method INSAT on the graph of convex sets, we achieve faster planning while ensuring stronger guarantees on completeness and optimality. Moveover, introducing a search-based technique to plan on the graph of convex sets enables us to easily leverage well-established techniques such as search parallelization, lazy planning, anytime planning, and replanning as future work. Numerical comparisons against GCS demonstrate the superiority of IxG across several applications, including planning for an 18-degree-of-freedom multi-arm assembly scenario.
PINSAT: Parallelized Interleaving of Graph Search and Trajectory Optimization for Kinodynamic Motion Planning
Jan 17, 2024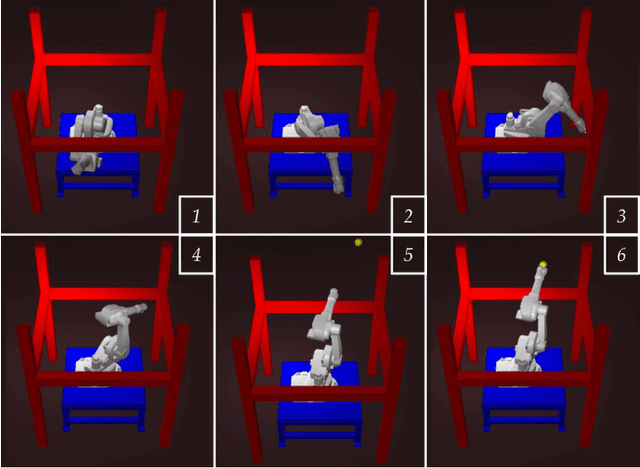

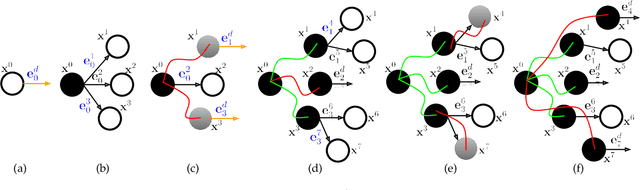
Trajectory optimization is a widely used technique in robot motion planning for letting the dynamics and constraints on the system shape and synthesize complex behaviors. Several previous works have shown its benefits in high-dimensional continuous state spaces and under differential constraints. However, long time horizons and planning around obstacles in non-convex spaces pose challenges in guaranteeing convergence or finding optimal solutions. As a result, discrete graph search planners and sampling-based planers are preferred when facing obstacle-cluttered environments. A recently developed algorithm called INSAT effectively combines graph search in the low-dimensional subspace and trajectory optimization in the full-dimensional space for global kinodynamic planning over long horizons. Although INSAT successfully reasoned about and solved complex planning problems, the numerous expensive calls to an optimizer resulted in large planning times, thereby limiting its practical use. Inspired by the recent work on edge-based parallel graph search, we present PINSAT, which introduces systematic parallelization in INSAT to achieve lower planning times and higher success rates, while maintaining significantly lower costs over relevant baselines. We demonstrate PINSAT by evaluating it on 6 DoF kinodynamic manipulation planning with obstacles.
Preprocessing-based Kinodynamic Motion Planning Framework for Intercepting Projectiles using a Robot Manipulator
Jan 16, 2024



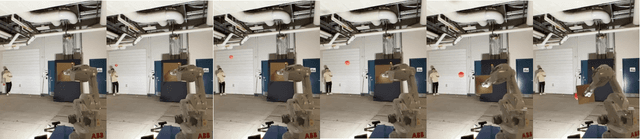
We are interested in studying sports with robots and starting with the problem of intercepting a projectile moving toward a robot manipulator equipped with a shield. To successfully perform this task, the robot needs to (i) detect the incoming projectile, (ii) predict the projectile's future motion, (iii) plan a minimum-time rapid trajectory that can evade obstacles and intercept the projectile, and (iv) execute the planned trajectory. These four steps must be performed under the manipulator's dynamic limits and extreme time constraints (<350ms in our setting) to successfully intercept the projectile. In addition, we want these trajectories to be smooth to reduce the robot's joint torques and the impulse on the platform on which it is mounted. To this end, we propose a kinodynamic motion planning framework that preprocesses smooth trajectories offline to allow real-time collision-free executions online. We present an end-to-end pipeline along with our planning framework, including perception, prediction, and execution modules. We evaluate our framework experimentally in simulation and show that it has a higher blocking success rate than the baselines. Further, we deploy our pipeline on a robotic system comprising an industrial arm (ABB IRB-1600) and an onboard stereo camera (ZED 2i), which achieves a 78% success rate in projectile interceptions.
Torque-Limited Manipulation Planning through Contact by Interleaving Graph Search and Trajectory Optimization
Oct 16, 2022
Robots often have to perform manipulation tasks in close proximity to people. As such, it is desirable to use a robot arm that has limited joint torques so as to not injure the nearby person. Unfortunately, these limited torques then limit the payload capability of the arm. By using contact with the environment, robots can expand their reachable workspace that, otherwise, would be inaccessible due to exceeding actuator torque limits. We adapt our recently developed INSAT algorithm \cite{insat} to tackle the problem of torque-limited whole arm manipulation planning through contact. INSAT requires no prior over contact mode sequence and no initial template or seed for trajectory optimization. INSAT achieves this by interleaving graph search to explore the manipulator joint configuration space with incremental trajectory optimizations seeded by neighborhood solutions to find a dynamically feasible trajectory through contact. We demonstrate our results on a variety of manipulators and scenarios in simulation. We also experimentally show our planner exploiting robot-environment contact for the pick and place of a payload using a Kinova Gen3 robot. In comparison to the same trajectory running in free space, we experimentally show that the utilization of bracing contacts reduces the overall torque required to execute the trajectory.
Interleaving Graph Search and Trajectory Optimization for Aggressive Quadrotor Flight
Jan 29, 2021

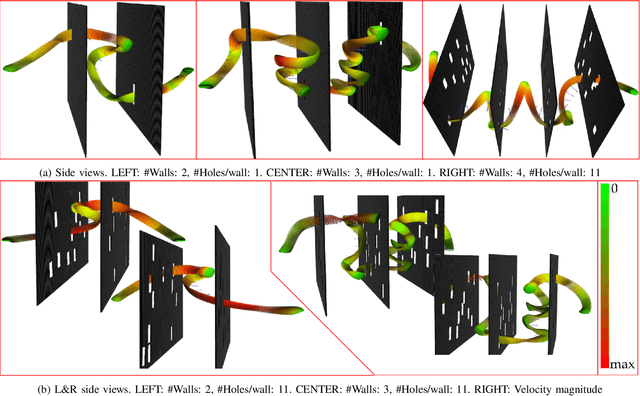
Quadrotors can achieve aggressive flight by tracking complex maneuvers and rapidly changing directions. Planning for aggressive flight with trajectory optimization could be incredibly fast, even in higher dimensions, and can account for dynamics of the quadrotor, however, only provides a locally optimal solution. On the other hand, planning with discrete graph search can handle non-convex spaces to guarantee optimality but suffers from exponential complexity with the dimension of search. We introduce a framework for aggressive quadrotor trajectory generation with global reasoning capabilities that combines the best of trajectory optimization and discrete graph search. Specifically, we develop a novel algorithmic framework that \textit{interleaves} these two methods to complement each other and generate trajectories with provable guarantees on completeness up to discretization. We demonstrate and quantitatively analyze the performance of our algorithm in challenging simulation environments with narrow gaps that create severe attitude constraints and push the dynamic capabilities of the quadrotor. Experiments show the benefits of the proposed algorithmic framework over standalone trajectory optimization and graph search-based planning techniques for aggressive quadrotor flight.
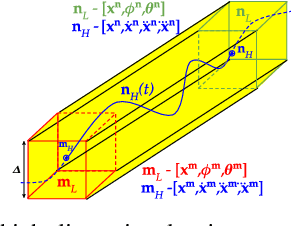
Towards Planning and Control of Hybrid Systems with Limit Cycle using LQR Trees
Nov 11, 2017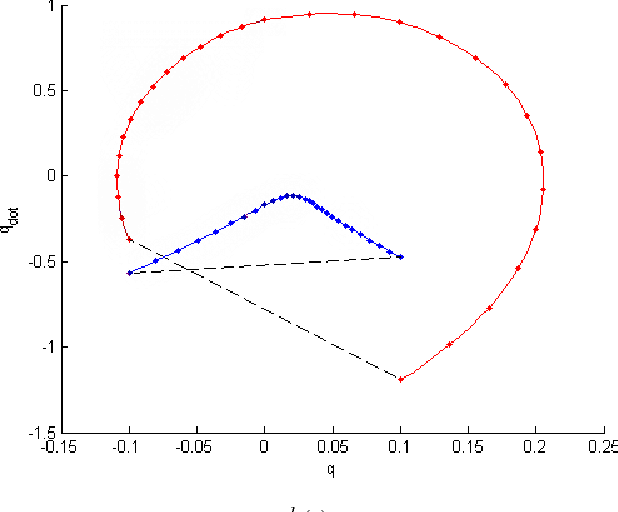
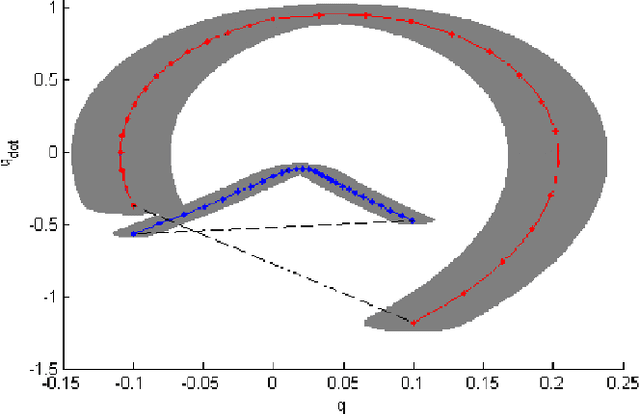
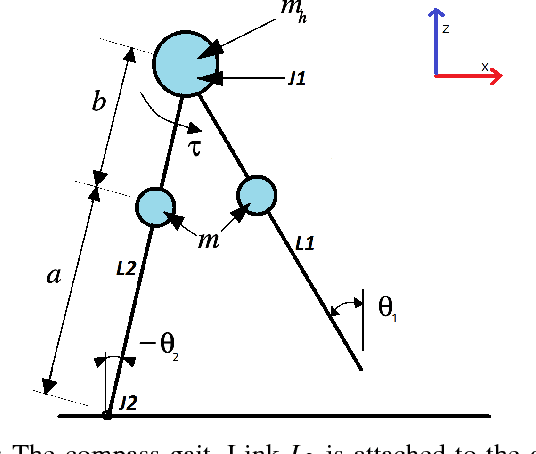
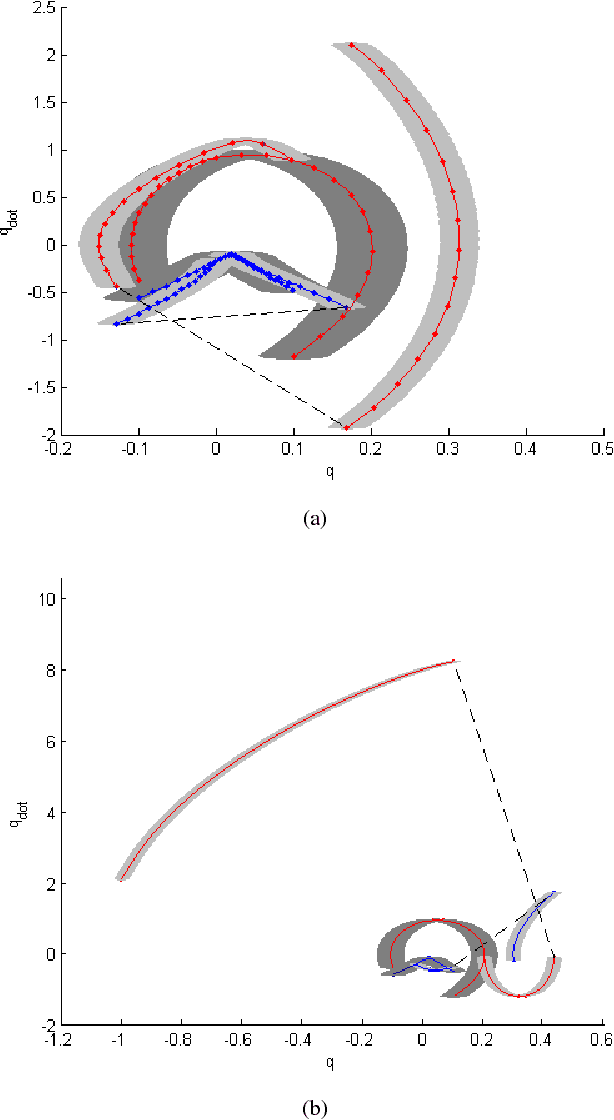
We present a multi-query recovery policy for a hybrid system with goal limit cycle. The sample trajectories and the hybrid limit cycle of the dynamical system are stabilized using locally valid Time Varying LQR controller policies which probabilistically cover a bounded region of state space. The original LQR Tree algorithm builds such trees for non-linear static and non-hybrid systems like a pendulum or a cart-pole. We leverage the idea of LQR trees to plan with a continuous control set, unlike methods that rely on discretization like dynamic programming to plan for hybrid dynamical systems where it is hard to capture the exact event of discrete transition. We test the algorithm on a compass gait model by stabilizing a dynamic walking hybrid limit cycle with point foot contact from random initial conditions. We show results from the simulation where the system comes back to a stable behavior with initial position or velocity perturbation and noise.
Transfer from Multiple Linear Predictive State Representations (PSR)
Feb 07, 2017
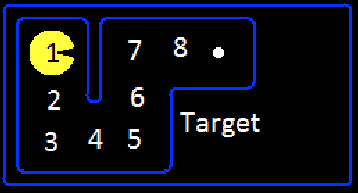
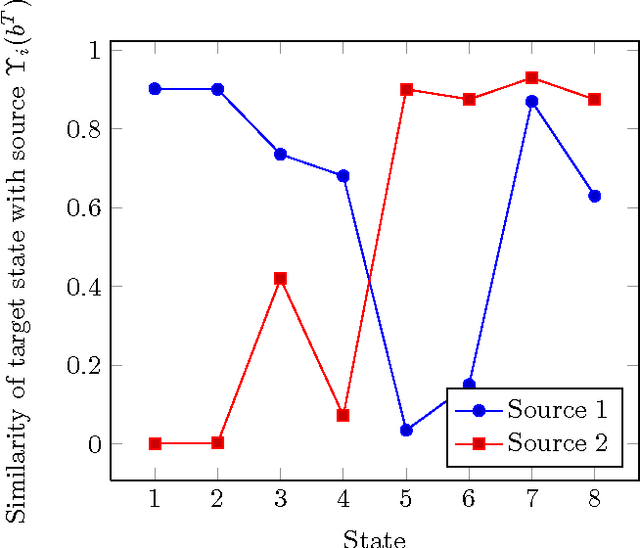
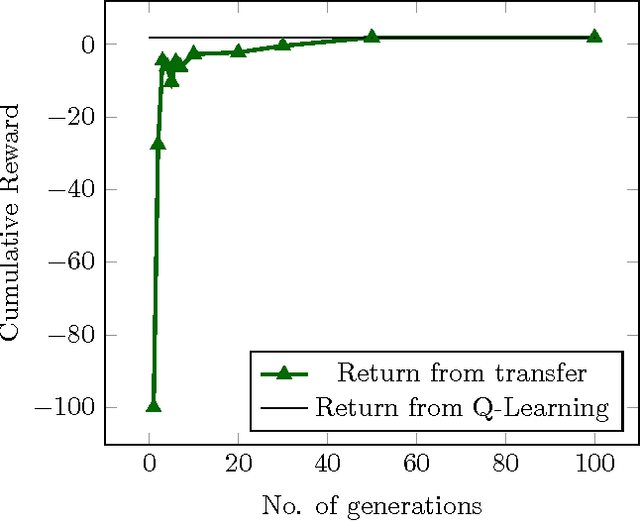
In this paper, we tackle the problem of transferring policy from multiple partially observable source environments to a partially observable target environment modeled as predictive state representation. This is an entirely new approach with no previous work, other than the case of transfer in fully observable domains. We develop algorithms to successfully achieve policy transfer when we have the model of both the source and target tasks and discuss in detail their performance and shortcomings. These algorithms could be a starting point for the field of transfer learning in partial observability.