 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChain of Thought Monitorability: A New and Fragile Opportunity for AI Safety
Jul 15, 2025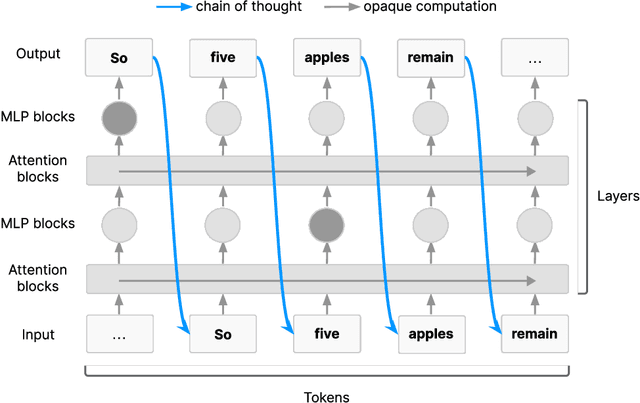
AI systems that "think" in human language offer a unique opportunity for AI safety: we can monitor their chains of thought (CoT) for the intent to misbehave. Like all other known AI oversight methods, CoT monitoring is imperfect and allows some misbehavior to go unnoticed. Nevertheless, it shows promise and we recommend further research into CoT monitorability and investment in CoT monitoring alongside existing safety methods. Because CoT monitorability may be fragile, we recommend that frontier model developers consider the impact of development decisions on CoT monitorability.
HCAST: Human-Calibrated Autonomy Software Tasks
Mar 21, 2025To understand and predict the societal impacts of highly autonomous AI systems, we need benchmarks with grounding, i.e., metrics that directly connect AI performance to real-world effects we care about. We present HCAST (Human-Calibrated Autonomy Software Tasks), a benchmark of 189 machine learning engineering, cybersecurity, software engineering, and general reasoning tasks. We collect 563 human baselines (totaling over 1500 hours) from people skilled in these domains, working under identical conditions as AI agents, which lets us estimate that HCAST tasks take humans between one minute and 8+ hours. Measuring the time tasks take for humans provides an intuitive metric for evaluating AI capabilities, helping answer the question "can an agent be trusted to complete a task that would take a human X hours?" We evaluate the success rates of AI agents built on frontier foundation models, and we find that current agents succeed 70-80% of the time on tasks that take humans less than one hour, and less than 20% of the time on tasks that take humans more than 4 hours.
Measuring AI Ability to Complete Long Tasks
Mar 18, 2025Despite rapid progress on AI benchmarks, the real-world meaning of benchmark performance remains unclear. To quantify the capabilities of AI systems in terms of human capabilities, we propose a new metric: 50%-task-completion time horizon. This is the time humans typically take to complete tasks that AI models can complete with 50% success rate. We first timed humans with relevant domain expertise on a combination of RE-Bench, HCAST, and 66 novel shorter tasks. On these tasks, current frontier AI models such as Claude 3.7 Sonnet have a 50% time horizon of around 50 minutes. Furthermore, frontier AI time horizon has been doubling approximately every seven months since 2019, though the trend may have accelerated in 2024. The increase in AI models' time horizons seems to be primarily driven by greater reliability and ability to adapt to mistakes, combined with better logical reasoning and tool use capabilities. We discuss the limitations of our results -- including their degree of external validity -- and the implications of increased autonomy for dangerous capabilities. If these results generalize to real-world software tasks, extrapolation of this trend predicts that within 5 years, AI systems will be capable of automating many software tasks that currently take humans a month.
RE-Bench: Evaluating frontier AI R&D capabilities of language model agents against human experts
Nov 22, 2024Frontier AI safety policies highlight automation of AI research and development (R&D) by AI agents as an important capability to anticipate. However, there exist few evaluations for AI R&D capabilities, and none that are highly realistic and have a direct comparison to human performance. We introduce RE-Bench (Research Engineering Benchmark, v1), which consists of 7 challenging, open-ended ML research engineering environments and data from 71 8-hour attempts by 61 distinct human experts. We confirm that our experts make progress in the environments given 8 hours, with 82% of expert attempts achieving a non-zero score and 24% matching or exceeding our strong reference solutions. We compare humans to several public frontier models through best-of-k with varying time budgets and agent designs, and find that the best AI agents achieve a score 4x higher than human experts when both are given a total time budget of 2 hours per environment. However, humans currently display better returns to increasing time budgets, narrowly exceeding the top AI agent scores given an 8-hour budget, and achieving 2x the score of the top AI agent when both are given 32 total hours (across different attempts). Qualitatively, we find that modern AI agents possess significant expertise in many ML topics -- e.g. an agent wrote a faster custom Triton kernel than any of our human experts' -- and can generate and test solutions over ten times faster than humans, at much lower cost. We open-source the evaluation environments, human expert data, analysis code and agent trajectories to facilitate future research.
Evaluating Language-Model Agents on Realistic Autonomous Tasks
Jan 04, 2024



In this report, we explore the ability of language model agents to acquire resources, create copies of themselves, and adapt to novel challenges they encounter in the wild. We refer to this cluster of capabilities as "autonomous replication and adaptation" or ARA. We believe that systems capable of ARA could have wide-reaching and hard-to-anticipate consequences, and that measuring and forecasting ARA may be useful for informing measures around security, monitoring, and alignment. Additionally, once a system is capable of ARA, placing bounds on a system's capabilities may become significantly more difficult. We construct four simple example agents that combine language models with tools that allow them to take actions in the world. We then evaluate these agents on 12 tasks relevant to ARA. We find that these language model agents can only complete the easiest tasks from this list, although they make some progress on the more challenging tasks. Unfortunately, these evaluations are not adequate to rule out the possibility that near-future agents will be capable of ARA. In particular, we do not think that these evaluations provide good assurance that the ``next generation'' of language models (e.g. 100x effective compute scaleup on existing models) will not yield agents capable of ARA, unless intermediate evaluations are performed during pretraining. Relatedly, we expect that fine-tuning of the existing models could produce substantially more competent agents, even if the fine-tuning is not directly targeted at ARA.
Beyond the Imitation Game: Quantifying and extrapolating the capabilities of language models
Jun 10, 2022Language models demonstrate both quantitative improvement and new qualitative capabilities with increasing scale. Despite their potentially transformative impact, these new capabilities are as yet poorly characterized. In order to inform future research, prepare for disruptive new model capabilities, and ameliorate socially harmful effects, it is vital that we understand the present and near-future capabilities and limitations of language models. To address this challenge, we introduce the Beyond the Imitation Game benchmark (BIG-bench). BIG-bench currently consists of 204 tasks, contributed by 442 authors across 132 institutions. Task topics are diverse, drawing problems from linguistics, childhood development, math, common-sense reasoning, biology, physics, social bias, software development, and beyond. BIG-bench focuses on tasks that are believed to be beyond the capabilities of current language models. We evaluate the behavior of OpenAI's GPT models, Google-internal dense transformer architectures, and Switch-style sparse transformers on BIG-bench, across model sizes spanning millions to hundreds of billions of parameters. In addition, a team of human expert raters performed all tasks in order to provide a strong baseline. Findings include: model performance and calibration both improve with scale, but are poor in absolute terms (and when compared with rater performance); performance is remarkably similar across model classes, though with benefits from sparsity; tasks that improve gradually and predictably commonly involve a large knowledge or memorization component, whereas tasks that exhibit "breakthrough" behavior at a critical scale often involve multiple steps or components, or brittle metrics; social bias typically increases with scale in settings with ambiguous context, but this can be improved with prompting.
Evaluating Large Language Models Trained on Code
Jul 14, 2021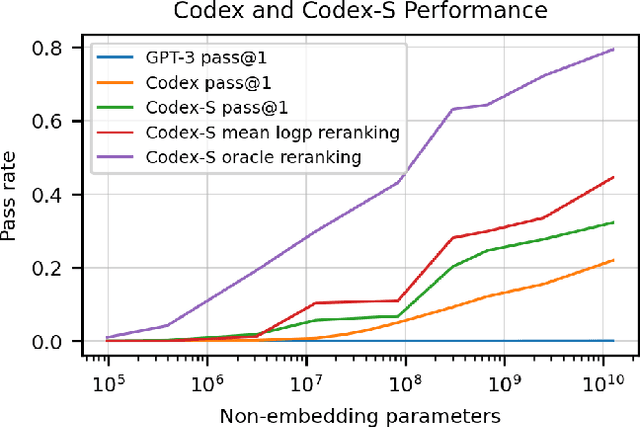
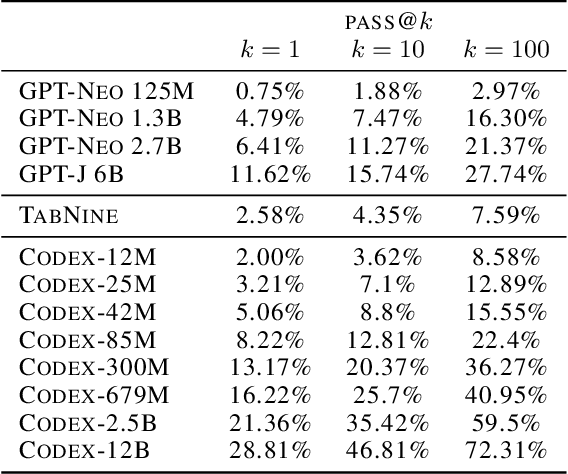
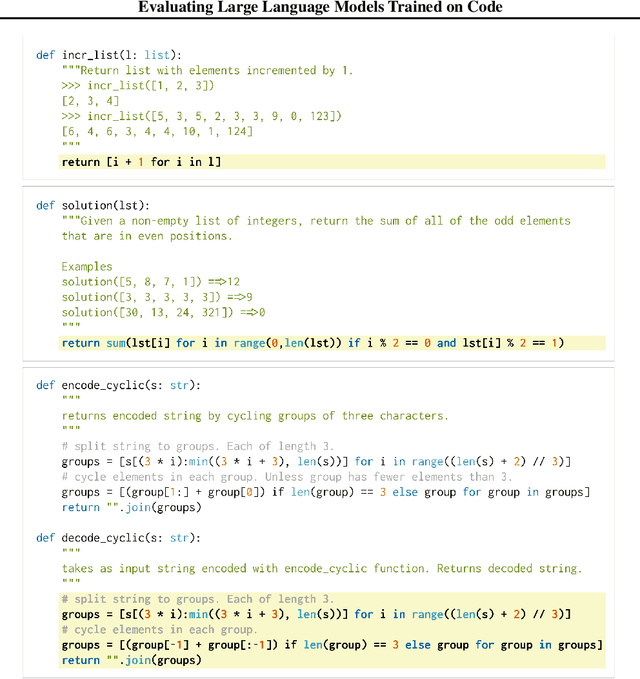
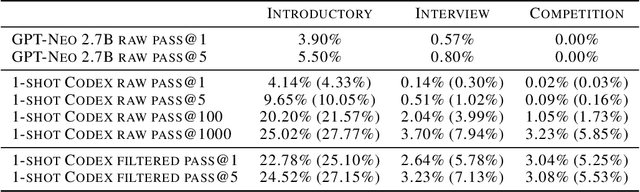
We introduce Codex, a GPT language model fine-tuned on publicly available code from GitHub, and study its Python code-writing capabilities. A distinct production version of Codex powers GitHub Copilot. On HumanEval, a new evaluation set we release to measure functional correctness for synthesizing programs from docstrings, our model solves 28.8% of the problems, while GPT-3 solves 0% and GPT-J solves 11.4%. Furthermore, we find that repeated sampling from the model is a surprisingly effective strategy for producing working solutions to difficult prompts. Using this method, we solve 70.2% of our problems with 100 samples per problem. Careful investigation of our model reveals its limitations, including difficulty with docstrings describing long chains of operations and with binding operations to variables. Finally, we discuss the potential broader impacts of deploying powerful code generation technologies, covering safety, security, and economics.
Understanding Agent Incentives using Causal Influence Diagrams. Part I: Single Action Settings
Mar 12, 2019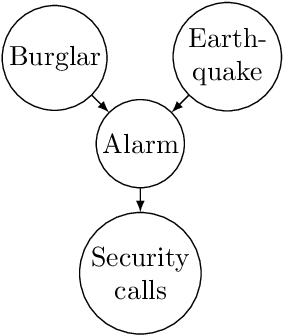

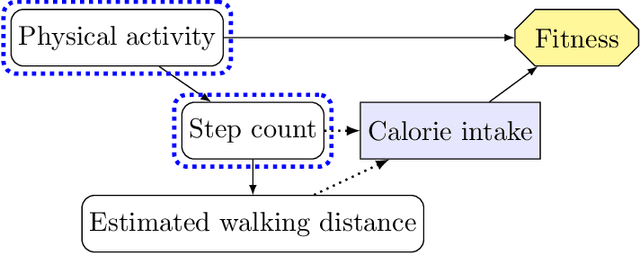
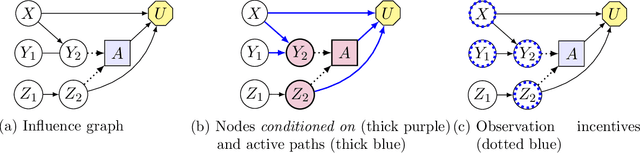
Agents are systems that optimize an objective function in an environment. Together, the goal and the environment induce secondary objectives, incentives. Modeling the agent-environment interaction in graphical models called influence diagrams, we can answer two fundamental questions about an agent's incentives directly from the graph: (1) which nodes is the agent incentivized to observe, and (2) which nodes is the agent incentivized to influence? The answers tell us which information and influence points need extra protection. For example, we may want a classifier for job applications to not use the ethnicity of the candidate, and a reinforcement learning agent not to take direct control of its reward mechanism. Different algorithms and training paradigms can lead to different influence diagrams, so our method can be used to identify algorithms with problematic incentives and help in designing algorithms with better incentives.