 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUME: A Unified Meta-Generalization Framework for Cross-Domain ETA
May 31, 2026Accurate Estimated Time of Arrival (ETA) prediction on checkout page is crucial in instant logistics for enhancing user satisfaction, optimizing dispatching, and controlling operational costs. In international on-demand delivery platforms, where ETA data originates from diverse countries or regions with different patterns, multi-domain modeling is of great importance and has been widely adopted. However, existing methods still face three critical challenges in real-world deployment. First, current multi-domain models struggle to generalize to completely unseen domains, failing to achieve zero-shot prediction during the initial cold-start phase. Second, cross-domain feature spaces are often assumed to be consistent, whereas new domains commonly suffer from structural missingness of offline (statistical) features due to the lack of historical data. Third, such feature missingness often compels industrial systems to model mature and cold-start domains separately, hindering knowledge transfer and increasing maintenance overhead. To address these challenges, we propose \textbf{UME}, a \textbf{U}nified \textbf{M}eta-generalization framework for \textbf{E}TA. Specifically, UME integrates a unified dual-branch architecture with a novel meta-learning mechanism that employs a hypernetwork-based meta learner. By leveraging domain-level knowledge and instance-level context, the meta learner empowers three meta modules to dynamically modulate feature gating, expert attention, and final prediction, capturing cross-domain correlations and facilitating intra-domain adaptation. A knowledge distillation strategy is further introduce to enhance performance. UME has now been deployed in Meituan-keeta delivery platform (the largest international food delivery platform in China). Extensive offline experiments and online A/B tests demonstrate that UME significantly outperforms existing baselines.
Uni-LaViRA: Language-Vision-Robot Actions Translation for Unified Embodied Navigation
May 26, 2026Embodied navigation requires an agent to map language and visual observations to a stream of spatial actions that drive a real robot through environments it has never seen. The dominant approach has been to scale vision-language-action (VLA) foundation models on ever-larger collections of robot trajectories. This paper argues that, for navigation specifically, generality can be obtained structurally, not only through data scale. The underlying decision structure of navigation reduces to a single Language-Vision-Robot Actions Translation. The language action emits semantic-level directional command and the vision action emits a pixel-level visual target. Both outputs lie inside the natural output manifold of pretrained multimodal large language models (MLLMs), so the task can be reasoned about by an agent rather than learned from robot data. Therefore, we present Uni-LaViRA, a unified agentic architecture that extends the same insight to four task families (VLN-CE, ObjectNav, EQA, and Aerial-VLN) and to four heterogeneous real robots (Wheeled, Quadruped, Humanoid robot, and a self-built UAV) in a zero-shot manner. Two agent-loop mechanisms make this unification practical. TODO List Memory (TDM) rewrites a structured checklist of pending sub-goals at every step, reciting the unfinished items back into the agent's most recent attention window. Second Chance Backtrack (SCB) rolls the robot back to the pre-error state and conditions the agent's next plan on the failed sub-trajectory, turning single-pass navigation into a self-correcting process. With zero training effort, Uni-LaViRA reaches 60.7% SR on VLN-CE R2R, 51.3% on VLN-CE RxR, 77.7% on HM3D-v2, 60.0% on HM3D-OVON, 54.7% on MP3D-EQA, and 40.0% on OpenUAV, matching or even surpassing recent training navigation foundation models that consume millions of samples and thousands of GPU-hours.
R^2-HGP: A Double-Regularized Gaussian Process for Heterogeneous Transfer Learning
Dec 11, 2025Multi-output Gaussian process (MGP) models have attracted significant attention for their flexibility and uncertainty-quantification capabilities, and have been widely adopted in multi-source transfer learning scenarios due to their ability to capture inter-task correlations. However, they still face several challenges in transfer learning. First, the input spaces of the source and target domains are often heterogeneous, which makes direct knowledge transfer difficult. Second, potential prior knowledge and physical information are typically ignored during heterogeneous transfer, hampering the utilization of domain-specific insights and leading to unstable mappings. Third, inappropriate information sharing among target and sources can easily lead to negative transfer. Traditional models fail to address these issues in a unified way. To overcome these limitations, this paper proposes a Double-Regularized Heterogeneous Gaussian Process framework (R^2-HGP). Specifically, a trainable prior probability mapping model is first proposed to align the heterogeneous input domains. The resulting aligned inputs are treated as latent variables, upon which a multi-source transfer GP model is constructed and the entire structure is integrated into a novel conditional variational autoencoder (CVAE) based framework. Physical insights is further incorporated as a regularization term to ensure that the alignment results adhere to known physical knowledge. Next, within the multi-source transfer GP model, a sparsity penalty is imposed on the transfer coefficients, enabling the model to adaptively select the most informative source outputs and suppress negative transfer. Extensive simulations and real-world engineering case studies validate the effectiveness of our R^2-HGP, demonstrating consistent superiority over state-of-the-art benchmarks across diverse evaluation metrics.
Verification and Validation of a Vision-Based Landing System for Autonomous VTOL Air Taxis
Dec 11, 2024



Autonomous air taxis are poised to revolutionize urban mass transportation, however, ensuring their safety and reliability remains an open challenge. Validating autonomy solutions on air taxis in the real world presents complexities, risks, and costs that further convolute this challenge. Verification and Validation (V&V) frameworks play a crucial role in the design and development of highly reliable systems by formally verifying safety properties and validating algorithm behavior across diverse operational scenarios. Advancements in high-fidelity simulators have significantly enhanced their capability to emulate real-world conditions, encouraging their use for validating autonomous air taxi solutions, especially during early development stages. This evolution underscores the growing importance of simulation environments, not only as complementary tools to real-world testing but as essential platforms for evaluating algorithms in a controlled, reproducible, and scalable manner. This work presents a V&V framework for a vision-based landing system for air taxis with vertical take-off and landing (VTOL) capabilities. Specifically, we use Verse, a tool for formal verification, to model and verify the safety of the system by obtaining and analyzing the reachable sets. To conduct this analysis, we utilize a photorealistic simulation environment. The simulation environment, built on Unreal Engine, provides realistic terrain, weather, and sensor characteristics to emulate real-world conditions with high fidelity. To validate the safety analysis results, we conduct extensive scenario-based testing to assess the reachability set and robustness of the landing algorithm in various conditions. This approach showcases the representativeness of high-fidelity simulators, offering an effective means to analyze and refine algorithms before real-world deployment.
Bayesian Data Augmentation and Training for Perception DNN in Autonomous Aerial Vehicles
Dec 10, 2024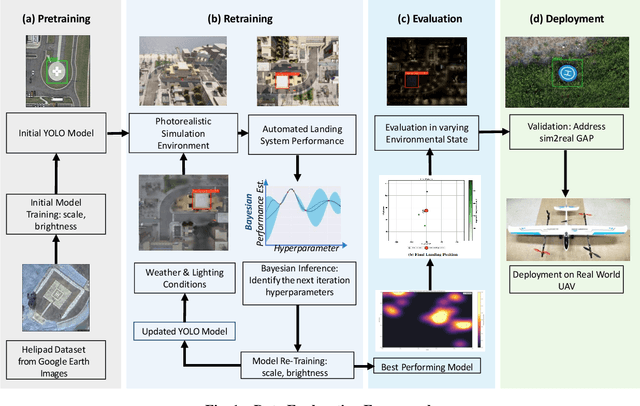
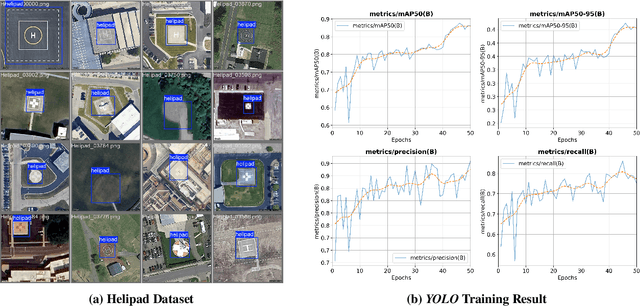
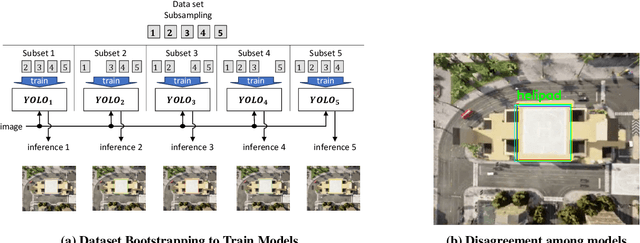
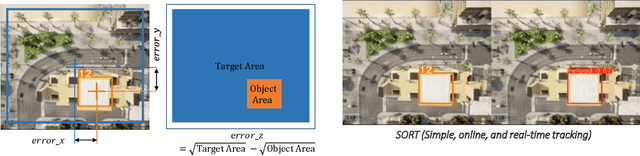
Learning-based solutions have enabled incredible capabilities for autonomous systems. Autonomous vehicles, both aerial and ground, rely on DNN for various integral tasks, including perception. The efficacy of supervised learning solutions hinges on the quality of the training data. Discrepancies between training data and operating conditions result in faults that can lead to catastrophic incidents. However, collecting vast amounts of context-sensitive data, with broad coverage of possible operating environments, is prohibitively difficult. Synthetic data generation techniques for DNN allow for the easy exploration of diverse scenarios. However, synthetic data generation solutions for aerial vehicles are still lacking. This work presents a data augmentation framework for aerial vehicle's perception training, leveraging photorealistic simulation integrated with high-fidelity vehicle dynamics. Safe landing is a crucial challenge in the development of autonomous air taxis, therefore, landing maneuver is chosen as the focus of this work. With repeated simulations of landing in varying scenarios we assess the landing performance of the VTOL type UAV and gather valuable data. The landing performance is used as the objective function to optimize the DNN through retraining. Given the high computational cost of DNN retraining, we incorporated Bayesian Optimization in our framework that systematically explores the data augmentation parameter space to retrain the best-performing models. The framework allowed us to identify high-performing data augmentation parameters that are consistently effective across different landing scenarios. Utilizing the capabilities of this data augmentation framework, we obtained a robust perception model. The model consistently improved the perception-based landing success rate by at least 20% under different lighting and weather conditions.
Online design of dynamic networks
Oct 11, 2024



Designing a network (e.g., a telecommunication or transport network) is mainly done offline, in a planning phase, prior to the operation of the network. On the other hand, a massive effort has been devoted to characterizing dynamic networks, i.e., those that evolve over time. The novelty of this paper is that we introduce a method for the online design of dynamic networks. The need to do so emerges when a network needs to operate in a dynamic and stochastic environment. In this case, one may wish to build a network over time, on the fly, in order to react to the changes of the environment and to keep certain performance targets. We tackle this online design problem with a rolling horizon optimization based on Monte Carlo Tree Search. The potential of online network design is showcased for the design of a futuristic dynamic public transport network, where bus lines are constructed on the fly to better adapt to a stochastic user demand. In such a scenario, we compare our results with state-of-the-art dynamic vehicle routing problem (VRP) resolution methods, simulating requests from a New York City taxi dataset. Differently from classic VRP methods, that extend vehicle trajectories in isolation, our method enables us to build a structured network of line buses, where complex user journeys are possible, thus increasing system performance.
Public Transport Network Design for Equality of Accessibility via Message Passing Neural Networks and Reinforcement Learning
Oct 11, 2024



Designing Public Transport (PT) networks able to satisfy mobility needs of people is essential to reduce the number of individual vehicles on the road, and thus pollution and congestion. Urban sustainability is thus tightly coupled to an efficient PT. Current approaches on Transport Network Design (TND) generally aim to optimize generalized cost, i.e., a unique number including operator and users' costs. Since we intend quality of PT as the capability of satisfying mobility needs, we focus instead on PT accessibility, i.e., the ease of reaching surrounding points of interest via PT. PT accessibility is generally unequally distributed in urban regions: suburbs generally suffer from poor PT accessibility, which condemns residents therein to be dependent on their private cars. We thus tackle the problem of designing bus lines so as to minimize the inequality in the geographical distribution of accessibility. We combine state-of-the-art Message Passing Neural Networks (MPNN) and Reinforcement Learning. We show the efficacy of our method against metaheuristics (classically used in TND) in a use case representing in simplified terms the city of Montreal.
LLMs as Zero-shot Graph Learners: Alignment of GNN Representations with LLM Token Embeddings
Aug 25, 2024



Zero-shot graph machine learning, especially with graph neural networks (GNNs), has garnered significant interest due to the challenge of scarce labeled data. While methods like self-supervised learning and graph prompt learning have been extensively explored, they often rely on fine-tuning with task-specific labels, limiting their effectiveness in zero-shot scenarios. Inspired by the zero-shot capabilities of instruction-fine-tuned large language models (LLMs), we introduce a novel framework named Token Embedding-Aligned Graph Language Model (TEA-GLM) that leverages LLMs as cross-dataset and cross-task zero-shot learners for graph machine learning. Concretely, we pretrain a GNN, aligning its representations with token embeddings of an LLM. We then train a linear projector that transforms the GNN's representations into a fixed number of graph token embeddings without tuning the LLM. A unified instruction is designed for various graph tasks at different levels, such as node classification (node-level) and link prediction (edge-level). These design choices collectively enhance our method's effectiveness in zero-shot learning, setting it apart from existing methods. Experiments show that our graph token embeddings help the LLM predictor achieve state-of-the-art performance on unseen datasets and tasks compared to other methods using LLMs as predictors.
Expressive Machine Dubbing Through Phrase-level Cross-lingual Prosody Transfer
Jun 21, 2023



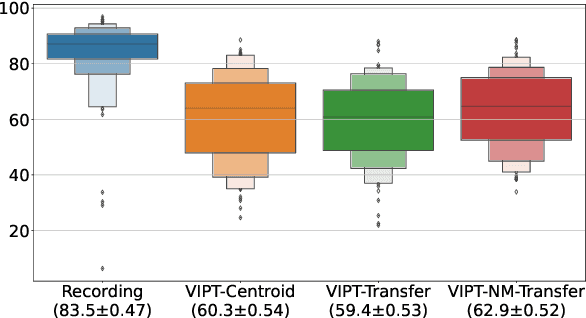
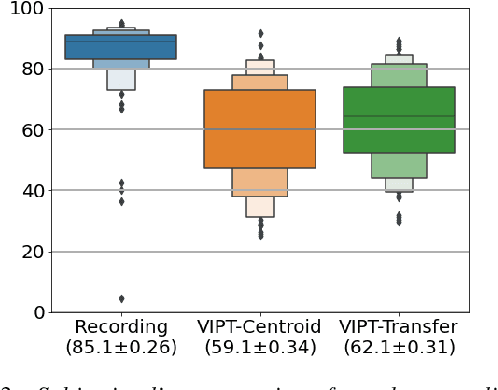
Speech generation for machine dubbing adds complexity to conventional Text-To-Speech solutions as the generated output is required to match the expressiveness, emotion and speaking rate of the source content. Capturing and transferring details and variations in prosody is a challenge. We introduce phrase-level cross-lingual prosody transfer for expressive multi-lingual machine dubbing. The proposed phrase-level prosody transfer delivers a significant 6.2% MUSHRA score increase over a baseline with utterance-level global prosody transfer, thereby closing the gap between the baseline and expressive human dubbing by 23.2%, while preserving intelligibility of the synthesised speech.
Cross-lingual Prosody Transfer for Expressive Machine Dubbing
Jun 20, 2023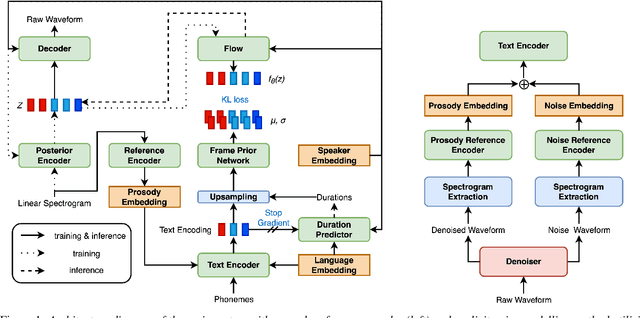
Prosody transfer is well-studied in the context of expressive speech synthesis. Cross-lingual prosody transfer, however, is challenging and has been under-explored to date. In this paper, we present a novel solution to learn prosody representations that are transferable across languages and speakers for machine dubbing of expressive multimedia contents. Multimedia contents often contain field recordings. To enable prosody transfer from noisy audios, we introduce a novel noise modelling module that disentangles noise conditioning from prosody conditioning, and thereby gains independent control of noise levels in the synthesised speech. We augment noisy training data with clean data to improve the ability of the model to map the denoised reference audio to clean speech. Our proposed system can generate speech with context-matching prosody and closes the gap between a strong baseline and human expressive dialogs by 11.2%.