 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExpert Switching for Robust AAV Landing: A Dual-Detector Framework in Simulation
Dec 17, 2025



Reliable helipad detection is essential for Autonomous Aerial Vehicle (AAV) landing, especially under GPS-denied or visually degraded conditions. While modern detectors such as YOLOv8 offer strong baseline performance, single-model pipelines struggle to remain robust across the extreme scale transitions that occur during descent, where helipads appear small at high altitude and large near touchdown. To address this limitation, we propose a scale-adaptive dual-expert perception framework that decomposes the detection task into far-range and close-range regimes. Two YOLOv8 experts are trained on scale-specialized versions of the HelipadCat dataset, enabling one model to excel at detecting small, low-resolution helipads and the other to provide high-precision localization when the target dominates the field of view. During inference, both experts operate in parallel, and a geometric gating mechanism selects the expert whose prediction is most consistent with the AAV's viewpoint. This adaptive routing prevents the degradation commonly observed in single-detector systems when operating across wide altitude ranges. The dual-expert perception module is evaluated in a closed-loop landing environment that integrates CARLA's photorealistic rendering with NASA's GUAM flight-dynamics engine. Results show substantial improvements in alignment stability, landing accuracy, and overall robustness compared to single-detector baselines. By introducing a scale-aware expert routing strategy tailored to the landing problem, this work advances resilient vision-based perception for autonomous descent and provides a foundation for future multi-expert AAV frameworks.
Development and Testing for Perception Based Autonomous Landing of a Long-Range QuadPlane
Dec 11, 2025



QuadPlanes combine the range efficiency of fixed-wing aircraft with the maneuverability of multi-rotor platforms for long-range autonomous missions. In GPS-denied or cluttered urban environments, perception-based landing is vital for reliable operation. Unlike structured landing zones, real-world sites are unstructured and highly variable, requiring strong generalization capabilities from the perception system. Deep neural networks (DNNs) provide a scalable solution for learning landing site features across diverse visual and environmental conditions. While perception-driven landing has been shown in simulation, real-world deployment introduces significant challenges. Payload and volume constraints limit high-performance edge AI devices like the NVIDIA Jetson Orin Nano, which are crucial for real-time detection and control. Accurate pose estimation during descent is necessary, especially in the absence of GPS, and relies on dependable visual-inertial odometry. Achieving this with limited edge AI resources requires careful optimization of the entire deployment framework. The flight characteristics of large QuadPlanes further complicate the problem. These aircraft exhibit high inertia, reduced thrust vectoring, and slow response times further complicate stable landing maneuvers. This work presents a lightweight QuadPlane system for efficient vision-based autonomous landing and visual-inertial odometry, specifically developed for long-range QuadPlane operations such as aerial monitoring. It describes the hardware platform, sensor configuration, and embedded computing architecture designed to meet demanding real-time, physical constraints. This establishes a foundation for deploying autonomous landing in dynamic, unstructured, GPS-denied environments.
Bayesian Data Augmentation and Training for Perception DNN in Autonomous Aerial Vehicles
Dec 10, 2024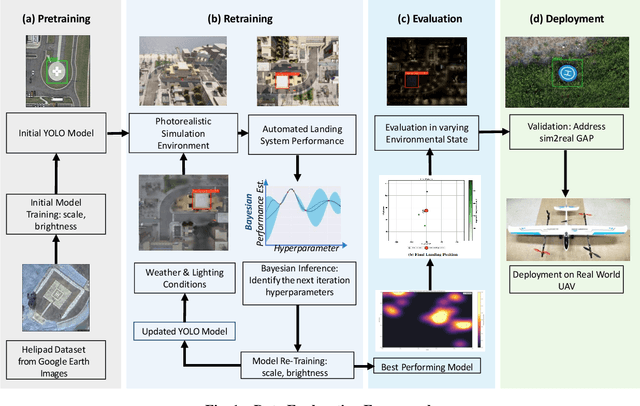
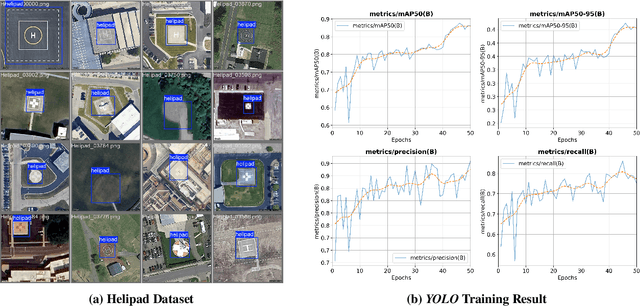
Learning-based solutions have enabled incredible capabilities for autonomous systems. Autonomous vehicles, both aerial and ground, rely on DNN for various integral tasks, including perception. The efficacy of supervised learning solutions hinges on the quality of the training data. Discrepancies between training data and operating conditions result in faults that can lead to catastrophic incidents. However, collecting vast amounts of context-sensitive data, with broad coverage of possible operating environments, is prohibitively difficult. Synthetic data generation techniques for DNN allow for the easy exploration of diverse scenarios. However, synthetic data generation solutions for aerial vehicles are still lacking. This work presents a data augmentation framework for aerial vehicle's perception training, leveraging photorealistic simulation integrated with high-fidelity vehicle dynamics. Safe landing is a crucial challenge in the development of autonomous air taxis, therefore, landing maneuver is chosen as the focus of this work. With repeated simulations of landing in varying scenarios we assess the landing performance of the VTOL type UAV and gather valuable data. The landing performance is used as the objective function to optimize the DNN through retraining. Given the high computational cost of DNN retraining, we incorporated Bayesian Optimization in our framework that systematically explores the data augmentation parameter space to retrain the best-performing models. The framework allowed us to identify high-performing data augmentation parameters that are consistently effective across different landing scenarios. Utilizing the capabilities of this data augmentation framework, we obtained a robust perception model. The model consistently improved the perception-based landing success rate by at least 20% under different lighting and weather conditions.