 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSecureSplit: Mitigating Backdoor Attacks in Split Learning
Jan 20, 2026Split Learning (SL) offers a framework for collaborative model training that respects data privacy by allowing participants to share the same dataset while maintaining distinct feature sets. However, SL is susceptible to backdoor attacks, in which malicious clients subtly alter their embeddings to insert hidden triggers that compromise the final trained model. To address this vulnerability, we introduce SecureSplit, a defense mechanism tailored to SL. SecureSplit applies a dimensionality transformation strategy to accentuate subtle differences between benign and poisoned embeddings, facilitating their separation. With this enhanced distinction, we develop an adaptive filtering approach that uses a majority-based voting scheme to remove contaminated embeddings while preserving clean ones. Rigorous experiments across four datasets (CIFAR-10, MNIST, CINIC-10, and ImageNette), five backdoor attack scenarios, and seven alternative defenses confirm the effectiveness of SecureSplit under various challenging conditions.
CMPhysBench: A Benchmark for Evaluating Large Language Models in Condensed Matter Physics
Aug 25, 2025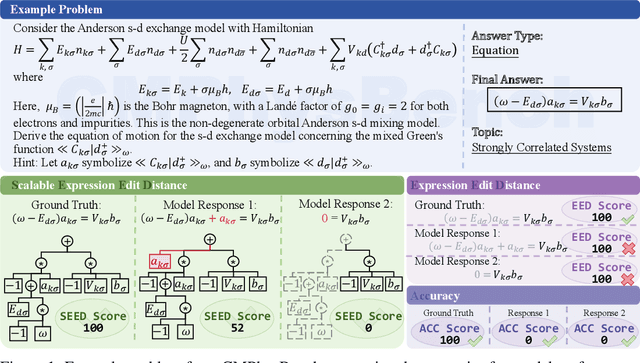
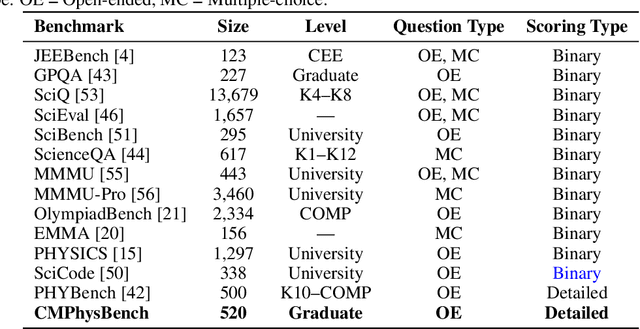
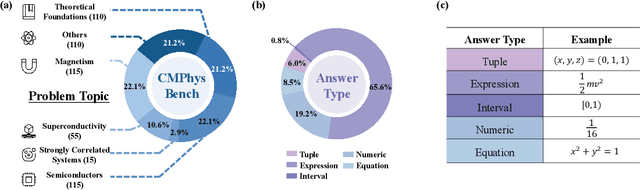

We introduce CMPhysBench, designed to assess the proficiency of Large Language Models (LLMs) in Condensed Matter Physics, as a novel Benchmark. CMPhysBench is composed of more than 520 graduate-level meticulously curated questions covering both representative subfields and foundational theoretical frameworks of condensed matter physics, such as magnetism, superconductivity, strongly correlated systems, etc. To ensure a deep understanding of the problem-solving process,we focus exclusively on calculation problems, requiring LLMs to independently generate comprehensive solutions. Meanwhile, leveraging tree-based representations of expressions, we introduce the Scalable Expression Edit Distance (SEED) score, which provides fine-grained (non-binary) partial credit and yields a more accurate assessment of similarity between prediction and ground-truth. Our results show that even the best models, Grok-4, reach only 36 average SEED score and 28% accuracy on CMPhysBench, underscoring a significant capability gap, especially for this practical and frontier domain relative to traditional physics. The code anddataset are publicly available at https://github.com/CMPhysBench/CMPhysBench.
DSADF: Thinking Fast and Slow for Decision Making
May 13, 2025



Although Reinforcement Learning (RL) agents are effective in well-defined environments, they often struggle to generalize their learned policies to dynamic settings due to their reliance on trial-and-error interactions. Recent work has explored applying Large Language Models (LLMs) or Vision Language Models (VLMs) to boost the generalization of RL agents through policy optimization guidance or prior knowledge. However, these approaches often lack seamless coordination between the RL agent and the foundation model, leading to unreasonable decision-making in unfamiliar environments and efficiency bottlenecks. Making full use of the inferential capabilities of foundation models and the rapid response capabilities of RL agents and enhancing the interaction between the two to form a dual system is still a lingering scientific question. To address this problem, we draw inspiration from Kahneman's theory of fast thinking (System 1) and slow thinking (System 2), demonstrating that balancing intuition and deep reasoning can achieve nimble decision-making in a complex world. In this study, we propose a Dual-System Adaptive Decision Framework (DSADF), integrating two complementary modules: System 1, comprising an RL agent and a memory space for fast and intuitive decision making, and System 2, driven by a VLM for deep and analytical reasoning. DSADF facilitates efficient and adaptive decision-making by combining the strengths of both systems. The empirical study in the video game environment: Crafter and Housekeep demonstrates the effectiveness of our proposed method, showing significant improvements in decision abilities for both unseen and known tasks.
BVIP Guiding System with Adaptability to Individual Differences
Apr 15, 2023Guiding robots can not only detect close-range obstacles like other guiding tools, but also extend its range to perceive the environment when making decisions. However, most existing works over-simplified the interaction between human agents and robots, ignoring the differences between individuals, resulting in poor experiences for different users. To solve the problem, we propose a data-driven guiding system to cope with the effect brighten by individual differences. In our guiding system, we design a Human Motion Predictor (HMP) and a Robot Dynamics Model (RDM) based on deep neural network, the time convolutional network (TCN) is verified to have the best performance, to predict differences in interaction between different human agents and robots. To train our models, we collected datasets that records the interactions from different human agents. Moreover, given the predictive information of the specific user, we propose a waypoints selector that allows the robot to naturally adapt to the user's state changes, which are mainly reflected in the walking speed. We compare the performance of our models with previous works and achieve significant performance improvements. On this basis, our guiding system demonstrated good adaptability to different human agents. Our guiding system is deployed on a real quadruped robot to verify the practicability.