 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-scale Vehicle Localization In Heterogeneous Mobile Communication Networks
Dec 01, 2024Low-latency and high-precision vehicle localization plays a significant role in enhancing traffic safety and improving traffic management for intelligent transportation. However, in complex road environments, the low latency and high precision requirements could not always be fulfilled due to the high complexity of localization computation. To tackle this issue, we propose a road-aware localization mechanism in heterogeneous networks (HetNet) of the mobile communication system, which enables real-time acquisition of vehicular position information, including the vehicular current road, segment within the road, and coordinates. By employing this multi-scale localization approach, the computational complexity can be greatly reduced while ensuring accurate positioning. Specifically, to reduce positioning search complexity and ensure positioning precision, roads are partitioned into low-dimensional segments with unequal lengths by the proposed singular point (SP) segmentation method. To reduce feature-matching complexity, distinctive salient features (SFs) are extracted sparsely representing roads and segments, which can eliminate redundant features while maximizing the feature information gain. The Cram\'er-Rao Lower Bound (CRLB) of vehicle positioning errors is derived to verify the positioning accuracy improvement brought from the segment partition and SF extraction. Additionally, through SF matching by integrating the inclusion and adjacency position relationships, a multi-scale vehicle localization (MSVL) algorithm is proposed to identify vehicular road signal patterns and determine the real-time segment and coordinates. Simulation results show that the proposed multi-scale localization mechanism can achieve lower latency and high precision compared to the benchmark schemes.
Rechargeable UAV Trajectory Optimization for Real-Time Persistent Data Collection of Large-Scale Sensor Networks
Apr 24, 2024



Continuous real-time data collection in wireless sensor networks is crucial for facilitating timely decision-making and environmental monitoring. Unmanned aerial vehicles (UAVs) have received plenty of attention for collecting data efficiently due to their high flexibility and enhanced communication ability, nonetheless, the limited onboard energy restricts UAVs' application on persistent missions, such as disaster search and rescue. In this paper, we propose a rechargeable UAV-assisted periodic data collection scheme, where the UAV replenishes energy through the wireless charging platform during the mission to provide persistent information services for the sensor nodes (SNs). Specifically, the total completion time is minimized by optimizing the trajectory of the UAV to reach the balance among the collecting time, flight time, and recharging time. However, optimally solving this problem is highly non-trivial due to the non-convex constraints and the involved integer variables. To address this issue, the formulated problem is decomposed into two subproblems, namely, UAV data collection trajectory optimization and SN clustering and UAV visiting order optimization. By exploiting the convex optimization techniques and proving the total time is non-decreasing with the cluster number, a periodic trajectory optimization algorithm based on successive convex approximation (SCA) and bisection search is proposed to solve the main problem. The simulation results show the efficiency of the proposed scheme in practical scenarios and the completion time of the proposed algorithm is on average 39% and 33% lower than the two benchmarks, respectively.
Road-Aware Localization With Salient Feature Matching in Heterogeneous Networks
Dec 24, 2023



Vehicle localization is essential for intelligent transportation. However, achieving low-latency vehicle localization without sacrificing precision is challenging. In this paper, we propose a road-aware localization mechanism in heterogeneous networks (HetNet), where distinct features of HetNet signals are extracted for two-spatial-scale position mapping, enabling low-latency positioning with high precision. Specifically, we propose a sequence segmentation method to extract the low-dimensional positioning space on two spatial scales. To represent roads and sub-segments according to HetNet signals, we propose a salient feature extraction method to eliminate redundant features and retain distinct features, thereby reducing feature-matching complexity and improving representation accuracy. Based on the extracted salient features, a two-spatial-scale localization algorithm is designed through salient feature matching, which can achieve low-latency road-aware localization. Furthermore, high-precision positioning is achieved by coordinate mapping based on curve fitting. Simulation results show that our mechanism can provide a low-latency and high-precision positioning service compared to the benchmark schemes.
Intelligent Surface Empowered Integrated Sensing and Communication: From Coexistence to Reciprocity
Nov 01, 2023Integrated sensing and communication (ISAC) has attracted growing interests for sixth-generation (6G) and beyond wireless networks. The primary challenges faced by highly efficient ISAC include limited sensing and communication (S&C) coverage, constrained integration gain between S&C under weak channel correlations, and unknown performance boundary. Intelligent reflecting/refracting surfaces (IRSs) can effectively expand S&C coverage and control the degree of freedom of channels between the transmitters and receivers, thereby realizing increasing integration gains. In this work, we first delve into the fundamental characteristics of IRS-empowered ISAC and innovative IRS-assisted sensing architectures. Then, we discuss various objectives for IRS channel control and deployment optimization in ISAC systems. Furthermore, the interplay between S&C in different deployment strategies is investigated and some promising directions for IRS enhanced ISAC are outlined.
Fast Ray-Tracing-Based Precise Underwater Acoustic Localization without Prior Acknowledgment of Target Depth
Oct 12, 2023



Underwater localization is of great importance for marine observation and building positioning, navigation, timing (PNT) systems that could be widely applied in disaster warning, underwater rescues and resources exploration. The uneven distribution of underwater sound velocity poses great challenge for precise underwater positioning. The current soundline correction positioning method mainly aims at scenarios with known target depth. However, for nodes that are non-cooperative nodes or lack of depth information, soundline tracking strategies cannot work well due to nonunique positional solutions. To tackle this issue, we propose an iterative ray tracing 3D underwater localization (IRTUL) method for stratification compensation. To demonstrate the feasibility of fast stratification compensation, we first derive the signal path as a function of glancing angle, and then prove that the signal propagation time and horizontal propagation distance are monotonic functions of the initial grazing angle, so that fast ray tracing can be achieved. Then, we propose an sound velocity profile (SVP) simplification method, which reduces the computational cost of ray tracing. Experimental results show that the IRTUL has the most significant distance correction in the depth direction, and the average accuracy of IRTUL has been improved by about 3 meters compared to localization model with constant sound velocity. Also, the simplified SVP can significantly improve real-time performance with average accuracy loss less than 0.2 m when used for positioning.
Duration-adaptive Video Highlight Pre-caching for Vehicular Communication Network
Sep 05, 2023



Video traffic in vehicular communication networks (VCNs) faces exponential growth. However, different segments of most videos reveal various attractiveness for viewers, and the pre-caching decision is greatly affected by the dynamic service duration that edge nodes can provide services for mobile vehicles driving along a road. In this paper, we propose an efficient video highlight pre-caching scheme in the vehicular communication network, adapting to the service duration. Specifically, a highlight entropy model is devised with the consideration of the segments' popularity and continuity between segments within a period of time, based on which, an optimization problem of video highlight pre-caching is formulated. As this problem is non-convex and lacks a closed-form expression of the objective function, we decouple multiple variables by deriving candidate highlight segmentations of videos through wavelet transform, which can significantly reduce the complexity of highlight pre-caching. Then the problem is solved iteratively by a highlight-direction trimming algorithm, which is proven to be locally optimal. Simulation results based on real-world video datasets demonstrate significant improvement in highlight entropy and jitter compared to benchmark schemes.
Cooperative Cellular Localization with Intelligent Reflecting Surface: Design, Analysis and Optimization
Jul 28, 2023



Autonomous driving and intelligent transportation applications have dramatically increased the demand for high-accuracy and low-latency localization services. While cellular networks are potentially capable of target detection and localization, achieving accurate and reliable positioning faces critical challenges. Particularly, the relatively small radar cross sections (RCS) of moving targets and the high complexity for measurement association give rise to weak echo signals and discrepancies in the measurements. To tackle this issue, we propose a novel approach for multi-target localization by leveraging the controllable signal reflection capabilities of intelligent reflecting surfaces (IRSs). Specifically, IRSs are strategically mounted on the targets (e.g., vehicles and robots), enabling effective association of multiple measurements and facilitating the localization process. We aim to minimize the maximum Cram\'er-Rao lower bound (CRLB) of targets by jointly optimizing the target association, the IRS phase shifts, and the dwell time. However, solving this CRLB optimization problem is non-trivial due to the non-convex objective function and closely coupled variables. For single-target localization, a simplified closed-form expression is presented for the case where base stations (BSs) can be deployed flexibly, and the optimal BS location is derived to provide a lower performance bound of the original problem ...
Sensing-Assisted Communication in Vehicular Networks with Intelligent Surface
Dec 11, 2022



The recent development of integrated sensing and communications (ISAC) technology offers new opportunities to meet high-throughput and low-latency communication as well as high-resolution localization requirements in vehicular networks. However, considering the limited transmit power of the road site units (RSUs) and the relatively small radar cross section (RCS) of vehicles with random reflection coefficients, the power of echo signals may be too weak to be utilized for effective target detection and tracking. Moreover, high-frequency signals usually suffer from large fading loss when penetrating vehicles, which seriously degrades the quality of communication services inside the vehicles. To handle this issue, we propose a novel sensing-assisted communication mechanism by employing an intelligent omni-surface (IOS) on the surface of vehicles to enhance both sensing and communication (S&C) performance. To this end, we first propose a two-stage ISAC protocol, including the joint S&C stage and the communication-only stage, to fulfill more efficient communication performance improvements benefited from sensing. The achievable communication rate maximization problem is formulated by jointly optimizing the transmit beamforming, the IOS phase shifts, and the duration of the joint S&C stage. However, solving this ISAC optimization problem is highly non-trivial since inaccurate estimation and measurement information renders the achievable rate lack of closed-form expression. To handle this issue, we first derive a closed-form expression of the achievable rate under uncertain location information, and then unveil a sufficient and necessary condition for the existence of the joint S&C stage to offer useful insights for practical system design. Moreover, two typical scenarios including interference-limited and noise-limited cases are analyzed.
Intelligent Surface Enabled Sensing-Assisted Communication
Nov 18, 2022



Vehicle-to-everything (V2X) communication is expected to support many promising applications in next-generation wireless networks. The recent development of integrated sensing and communications (ISAC) technology offers new opportunities to meet the stringent sensing and communication (S&C) requirements in V2X networks. However, considering the relatively small radar cross section (RCS) of the vehicles and the limited transmit power of the road site units (RSUs), the power of echoes may be too weak to achieve effective target detection and tracking. To handle this issue, we propose a novel sensing-assisted communication scheme by employing an intelligent Omni-surface (IOS) on the surface of the vehicle. First, a two-phase ISAC protocol, including the S&C phase and the communication-only phase, was presented to maximize the throughput by jointly optimizing the IOS phase shifts and the sensing duration. Then, we derive a closed-form expression of the achievable rate which achieves a good approximation. Furthermore, a sufficient and necessary condition for the existence of the S&C phase is derived to provide useful insights for practical system design. Simulation results demonstrate the effectiveness of the proposed sensing-assisted communication scheme in achieving high throughput with low transmit power requirements.
FedLoc: Federated Learning Framework for Cooperative Localization and Location Data Processing
Mar 08, 2020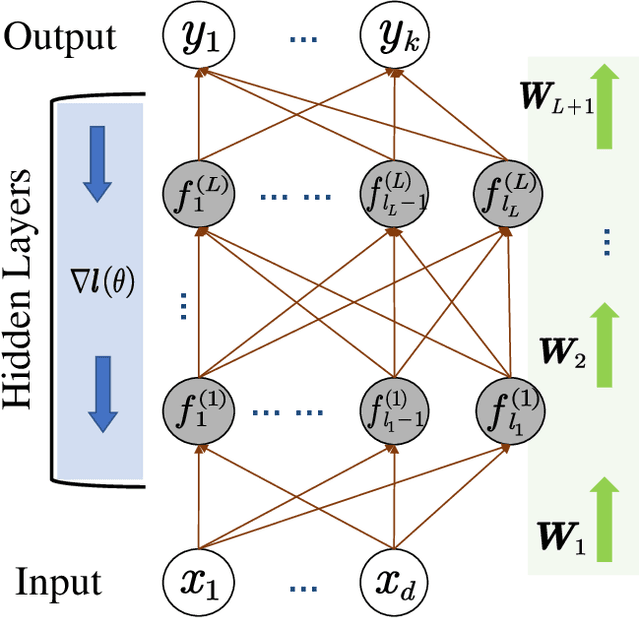
In this paper, we propose a new localization framework in which mobile users or smart agents can cooperate to build accurate location services without sacrificing privacy, in particular, information related to their trajectories. The proposed framework is called Federated Localization (FedLoc), simply because it adopts the recently proposed federated learning. Apart from the new FedLoc framework, this paper can be deemed as an overview paper, in which we review the state-of-the-art federated learning framework, two widely used learning models, various distributed model hyper-parameter optimization schemes, and some practical use cases that fall under the FedLoc framework. The use cases, summarized from a mixture of standard, recently published, and unpublished works, cover a broad range of location services, including collaborative static localization/fingerprinting, indoor target tracking, outdoor navigation using low-sampling GPS, and spatio-temporal wireless traffic data modeling and prediction. The obtained primary results confirm that the proposed FedLoc framework well suits data-driven, machine learning-based localization and spatio-temporal data modeling. Future research directions are discussed at the end of this paper.