 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTakeAD: Preference-based Post-optimization for End-to-end Autonomous Driving with Expert Takeover Data
Dec 22, 2025



Existing end-to-end autonomous driving methods typically rely on imitation learning (IL) but face a key challenge: the misalignment between open-loop training and closed-loop deployment. This misalignment often triggers driver-initiated takeovers and system disengagements during closed-loop execution. How to leverage those expert takeover data from disengagement scenarios and effectively expand the IL policy's capability presents a valuable yet unexplored challenge. In this paper, we propose TakeAD, a novel preference-based post-optimization framework that fine-tunes the pre-trained IL policy with this disengagement data to enhance the closed-loop driving performance. First, we design an efficient expert takeover data collection pipeline inspired by human takeover mechanisms in real-world autonomous driving systems. Then, this post optimization framework integrates iterative Dataset Aggregation (DAgger) for imitation learning with Direct Preference Optimization (DPO) for preference alignment. The DAgger stage equips the policy with fundamental capabilities to handle disengagement states through direct imitation of expert interventions. Subsequently, the DPO stage refines the policy's behavior to better align with expert preferences in disengagement scenarios. Through multiple iterations, the policy progressively learns recovery strategies for disengagement states, thereby mitigating the open-loop gap. Experiments on the closed-loop Bench2Drive benchmark demonstrate our method's effectiveness compared with pure IL methods, with comprehensive ablations confirming the contribution of each component.
VOILA: Complexity-Aware Universal Segmentation of CT images by Voxel Interacting with Language
Jan 07, 2025



Satisfactory progress has been achieved recently in universal segmentation of CT images. Following the success of vision-language methods, there is a growing trend towards utilizing text prompts and contrastive learning to develop universal segmentation models. However, there exists a significant imbalance in information density between 3D images and text prompts. Moreover, the standard fully connected layer segmentation approach faces significant challenges in handling multiple classes and exhibits poor generalizability. To address these challenges, we propose the VOxel Interacting with LAnguage method (VOILA) for universal CT image segmentation. Initially, we align voxels and language into a shared representation space and classify voxels on the basis of cosine similarity. Subsequently, we develop the Voxel-Language Interaction framework to mitigate the impact of class imbalance caused by foreground-background discrepancies and variations in target volumes. Furthermore, a Complexity-Aware Sampling method is proposed to focus on region hard to segment, achieved by generating pseudo-heatmaps from a trainable Gaussian mixture distribution. Our results indicate the proposed VOILA is capable to achieve improved performance with reduced parameters and computational cost during training. Furthermore, it demonstrates significant generalizability across diverse datasets without additional fine-tuning.
TrajGen: Generating Realistic and Diverse Trajectories with Reactive and Feasible Agent Behaviors for Autonomous Driving
Mar 31, 2022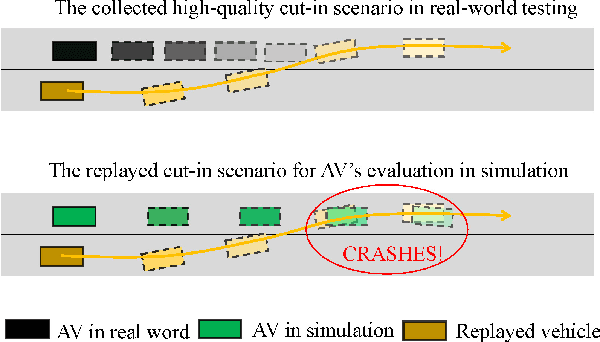
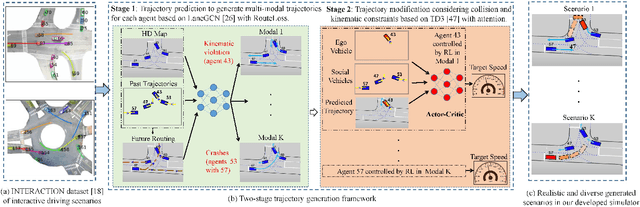
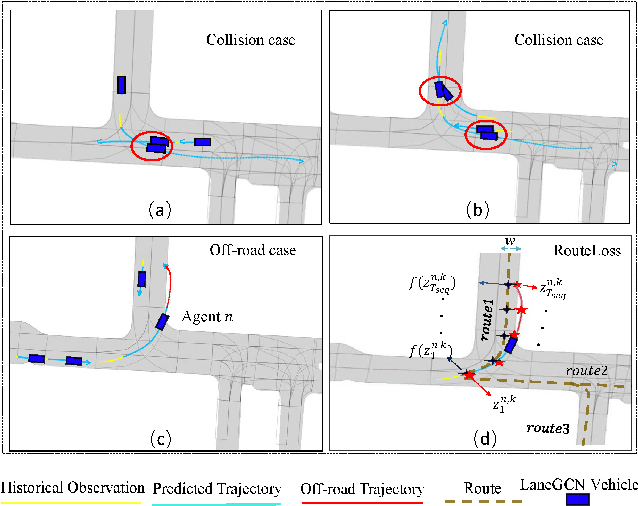
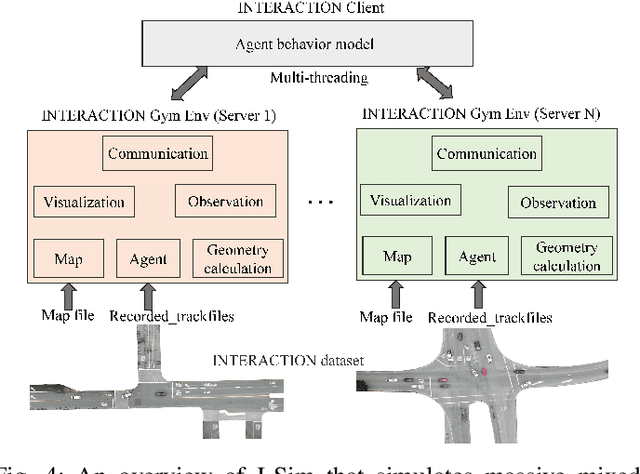
Realistic and diverse simulation scenarios with reactive and feasible agent behaviors can be used for validation and verification of self-driving system performance without relying on expensive and time-consuming real-world testing. Existing simulators rely on heuristic-based behavior models for background vehicles, which cannot capture the complex interactive behaviors in real-world scenarios. To bridge the gap between simulation and the real world, we propose TrajGen, a two-stage trajectory generation framework, which can capture more realistic behaviors directly from human demonstration. In particular, TrajGen consists of the multi-modal trajectory prediction stage and the reinforcement learning based trajectory modification stage. In the first stage, we propose a novel auxiliary RouteLoss for the trajectory prediction model to generate multi-modal diverse trajectories in the drivable area. In the second stage, reinforcement learning is used to track the predicted trajectories while avoiding collisions, which can improve the feasibility of generated trajectories. In addition, we develop a data-driven simulator I-Sim that can be used to train reinforcement learning models in parallel based on naturalistic driving data. The vehicle model in I-Sim can guarantee that the generated trajectories by TrajGen satisfy vehicle kinematic constraints. Finally, we give comprehensive metrics to evaluate generated trajectories for simulation scenarios, which shows that TrajGen outperforms either trajectory prediction or inverse reinforcement learning in terms of fidelity, reactivity, feasibility, and diversity.