 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerformance Guarantees for Spectral Initialization in Rotation Averaging and Pose-Graph SLAM
Jan 11, 2022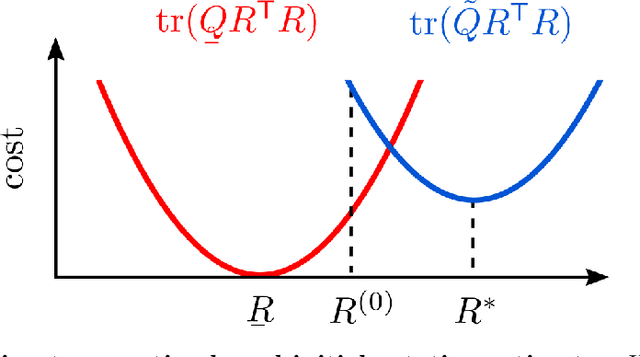
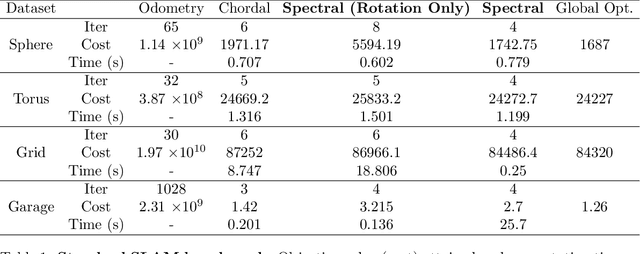
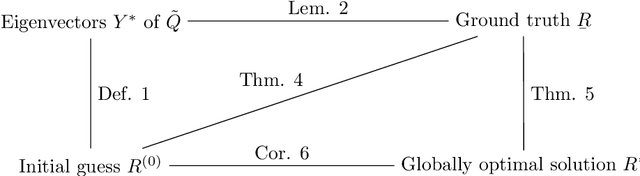
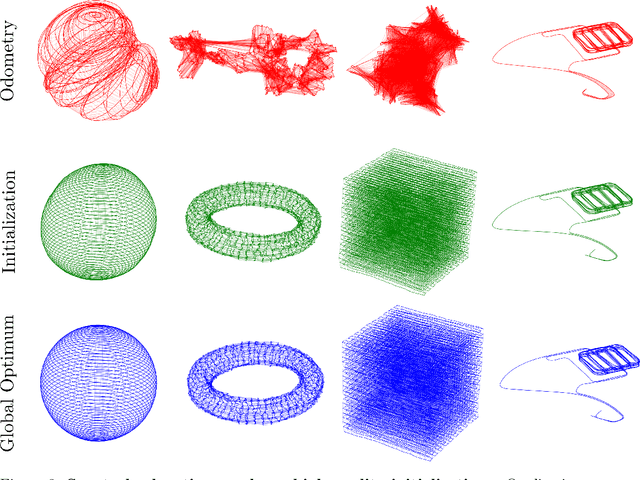
In this work we present the first initialization methods equipped with explicit performance guarantees adapted to the pose-graph simultaneous localization and mapping (SLAM) and rotation averaging (RA) problems. SLAM and rotation averaging are typically formalized as large-scale nonconvex point estimation problems, with many bad local minima that can entrap the smooth optimization methods typically applied to solve them; the performance of standard SLAM and RA algorithms thus crucially depends upon the quality of the estimates used to initialize this local search. While many initialization methods for SLAM and RA have appeared in the literature, these are typically obtained as purely heuristic approximations, making it difficult to determine whether (or under what circumstances) these techniques can be reliably deployed. In contrast, in this work we study the problem of initialization through the lens of spectral relaxation. Specifically, we derive a simple spectral relaxation of SLAM and RA, the form of which enables us to exploit classical linear-algebraic techniques (eigenvector perturbation bounds) to control the distance from our spectral estimate to both the (unknown) ground-truth and the global minimizer of the estimation problem as a function of measurement noise. Our results reveal the critical role that spectral graph-theoretic properties of the measurement network play in controlling estimation accuracy; moreover, as a by-product of our analysis we obtain new bounds on the estimation error for the maximum likelihood estimators in SLAM and RA, which are likely to be of independent interest. Finally, we show experimentally that our spectral estimator is very effective in practice, producing initializations of comparable or superior quality at lower computational cost compared to existing state-of-the-art techniques.
Online Incremental Non-Gaussian Inference for SLAM Using Normalizing Flows
Oct 02, 2021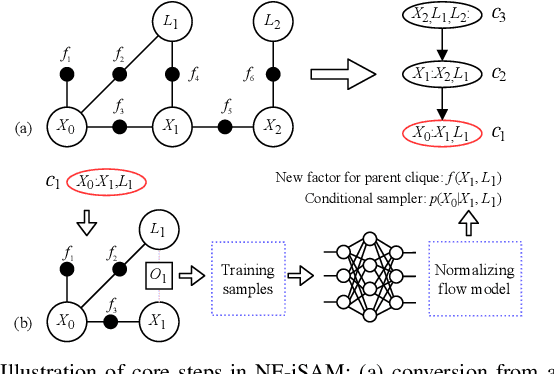
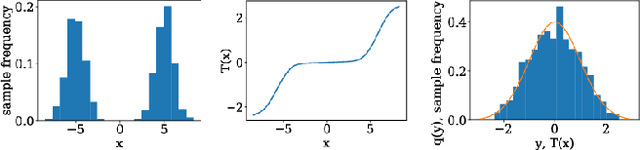
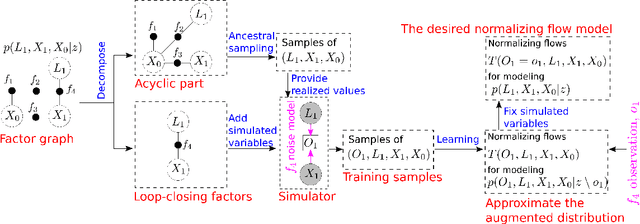
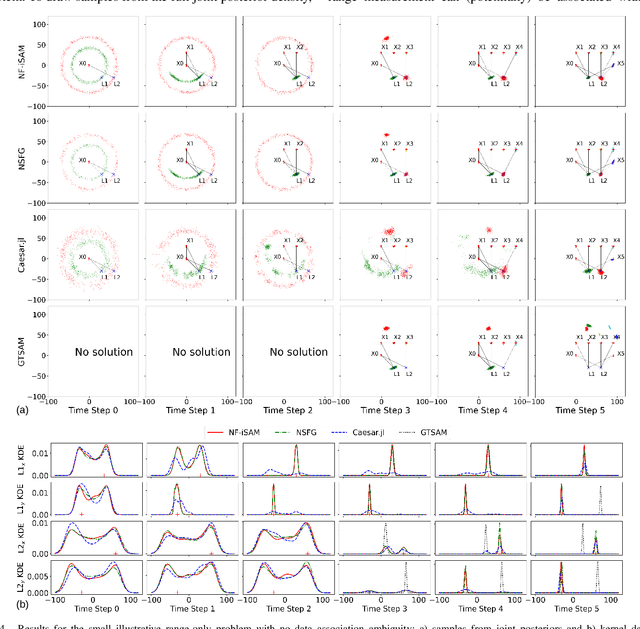
This paper presents a novel non-Gaussian inference algorithm, Normalizing Flow iSAM (NF-iSAM), for solving SLAM problems with non-Gaussian factors and/or nonlinear measurement models. NF-iSAM exploits the expressive power of neural networks to model normalizing flows that can accurately approximate the joint posterior of highly nonlinear and non-Gaussian factor graphs. By leveraging the Bayes tree, NF-iSAM is able to exploit the sparsity structure of SLAM, thus enabling efficient incremental updates similar to iSAM2, although in the more challenging non-Gaussian setting. We demonstrate the performance of NF-iSAM and compare it against state-of-the-art algorithms such as iSAM2 (Gaussian) and mm-iSAM (non-Gaussian) in synthetic and real range-only SLAM datasets with data association ambiguity.
Convex Iteration for Distance-Geometric Inverse Kinematics
Sep 08, 2021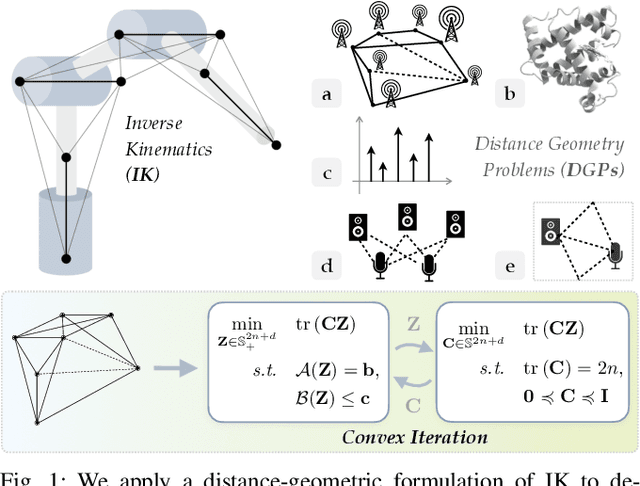
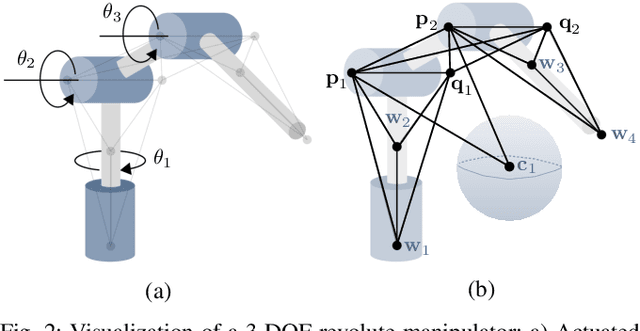
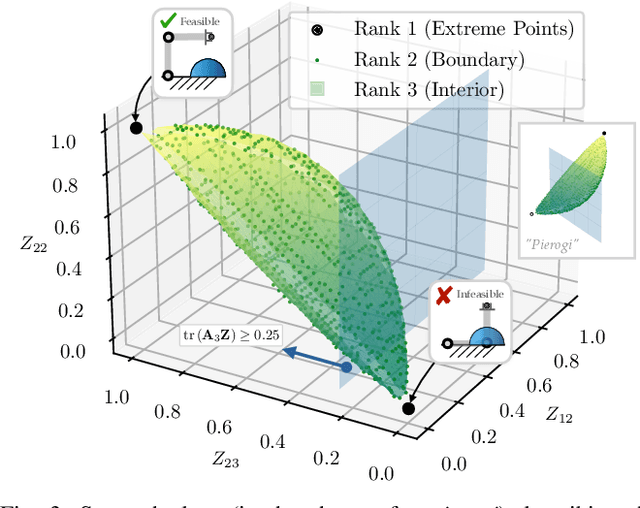
Inverse kinematics (IK) is the problem of finding robot joint configurations that satisfy constraints on the position or pose of one or more end-effectors. For robots with redundant degrees of freedom, there is often an infinite, nonconvex set of solutions. The IK problem is further complicated when collision avoidance constraints are imposed by obstacles in the workspace. In general, closed-form expressions yielding feasible configurations do not exist, motivating the use of numerical solution methods. However, these approaches rely on local optimization of nonconvex problems, often requiring an accurate initialization or numerous re-initializations to converge to a valid solution. In this work, we first formulate complicated inverse kinematics problems as convex feasibility problems whose low-rank feasible points provide exact IK solutions. We then present CIDGIK (Convex Iteration for Distance-Geometric Inverse Kinematics), an algorithm that solves these feasibility problems with a sequence of semidefinite programs whose objectives are designed to encourage low-rank minimizers. Our problem formulation elegantly unifies the configuration space and workspace constraints of a robot: intrinsic robot geometry and obstacle avoidance are both expressed as simple linear matrix equations and inequalities. Our experimental results for a variety of popular manipulator models demonstrate faster and more accurate convergence than a conventional nonlinear optimization-based approach, especially in environments with many obstacles.
Advances in Inference and Representation for Simultaneous Localization and Mapping
Mar 08, 2021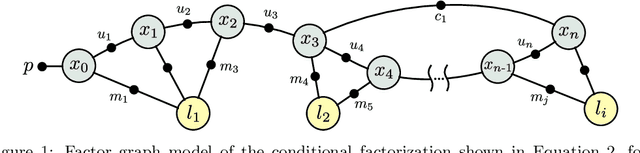

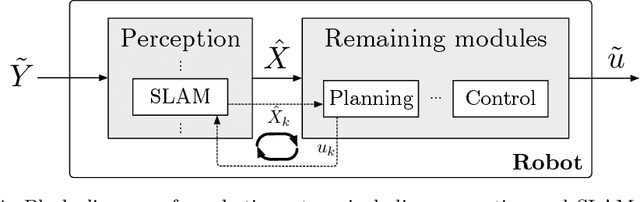
Simultaneous localization and mapping (SLAM) is the process of constructing a global model of an environment from local observations of it; this is a foundational capability for mobile robots, supporting such core functions as planning, navigation, and control. This article reviews recent progress in SLAM, focusing on advances in the expressive capacity of the environmental models used in SLAM systems (representation) and the performance of the algorithms used to estimate these models from data (inference). A prominent theme of recent SLAM research is the pursuit of environmental representations (including learned representations) that go beyond the classical attributes of geometry and appearance to model properties such as hierarchical organization, affordance, dynamics, and semantics; these advances equip autonomous agents with a more comprehensive understanding of the world, enabling more versatile and intelligent operation. A second major theme is a revitalized interest in the mathematical properties of the SLAM estimation problem itself (including its computational and information-theoretic performance limits); this work has led to the development of novel classes of certifiable and robust inference methods that dramatically improve the reliability of SLAM systems in real-world operation. We survey these advances with an emphasis on their ramifications for achieving robust, long-duration autonomy, and conclude with a discussion of open challenges and a perspective on future research directions.
Shonan Rotation Averaging: Global Optimality by Surfing $SO(p)^n$
Aug 06, 2020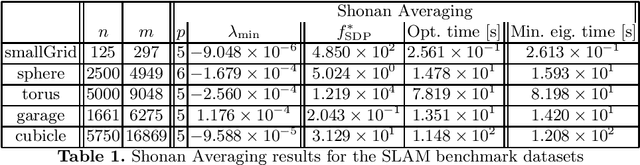
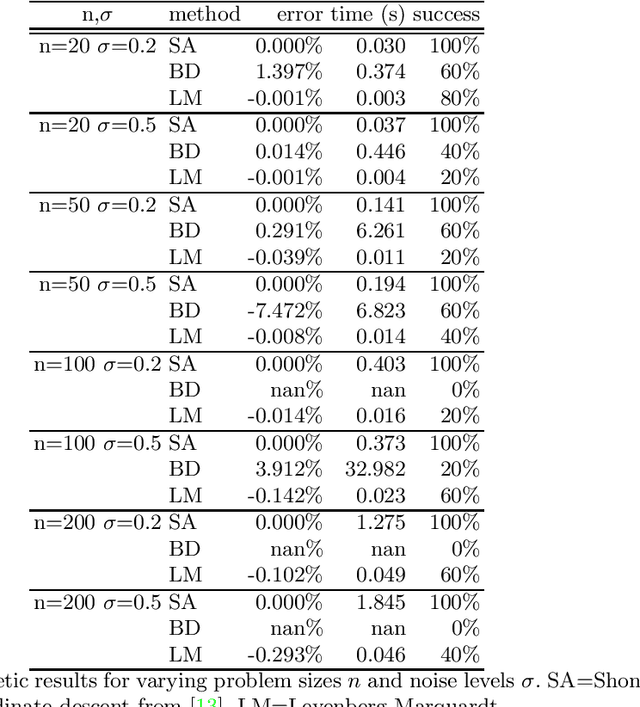
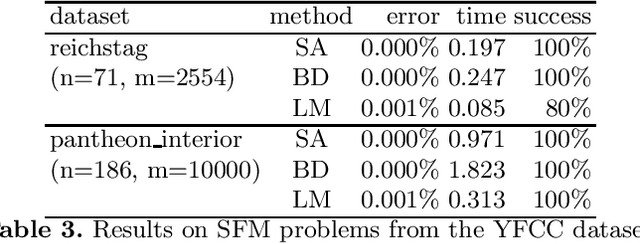
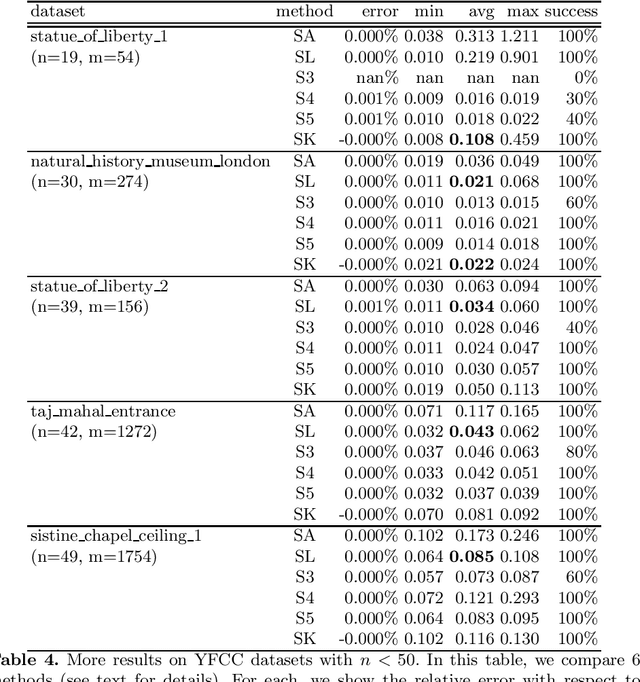
Shonan Rotation Averaging is a fast, simple, and elegant rotation averaging algorithm that is guaranteed to recover globally optimal solutions under mild assumptions on the measurement noise. Our method employs semidefinite relaxation in order to recover provably globally optimal solutions of the rotation averaging problem. In contrast to prior work, we show how to solve large-scale instances of these relaxations using manifold minimization on (only slightly) higher-dimensional rotation manifolds, re-using existing high-performance (but local) structure-from-motion pipelines. Our method thus preserves the speed and scalability of current SFM methods, while recovering globally optimal solutions.
A Smooth Representation of Belief over SO for Deep Rotation Learning with Uncertainty
Jun 17, 2020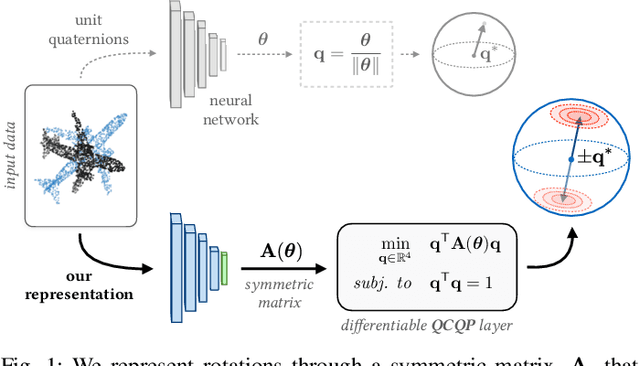
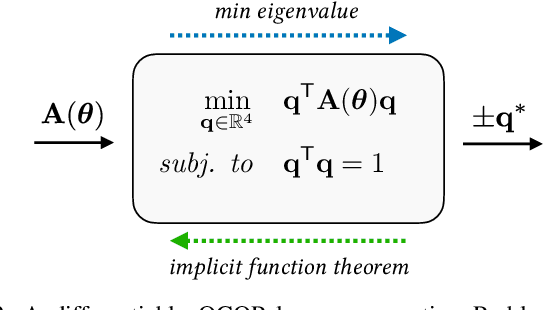
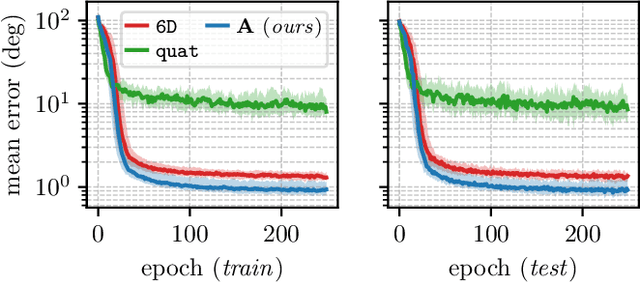
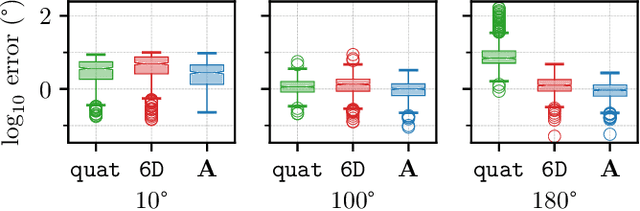
Accurate rotation estimation is at the heart of robot perception tasks such as visual odometry and object pose estimation. Deep neural networks have provided a new way to perform these tasks, and the choice of rotation representation is an important part of network design. In this work, we present a novel symmetric matrix representation of the 3D rotation group, SO(3), with two important properties that make it particularly suitable for learned models: (1) it satisfies a smoothness property that improves convergence and generalization when regressing large rotation targets, and (2) it encodes a symmetric Bingham belief over the space of unit quaternions, permitting the training of uncertainty-aware models. We empirically validate the benefits of our formulation by training deep neural rotation regressors on two data modalities. First, we use synthetic point-cloud data to show that our representation leads to superior predictive accuracy over existing representations for arbitrary rotation targets. Second, we use image data collected onboard ground and aerial vehicles to demonstrate that our representation is amenable to an effective out-of-distribution (OOD) rejection technique that significantly improves the robustness of rotation estimates to unseen environmental effects and corrupted input images, without requiring the use of an explicit likelihood loss, stochastic sampling, or an auxiliary classifier. This capability is key for safety-critical applications where detecting novel inputs can prevent catastrophic failure of learned models.
A Certifiably Correct Algorithm for Synchronization over the Special Euclidean Group
Feb 10, 2017

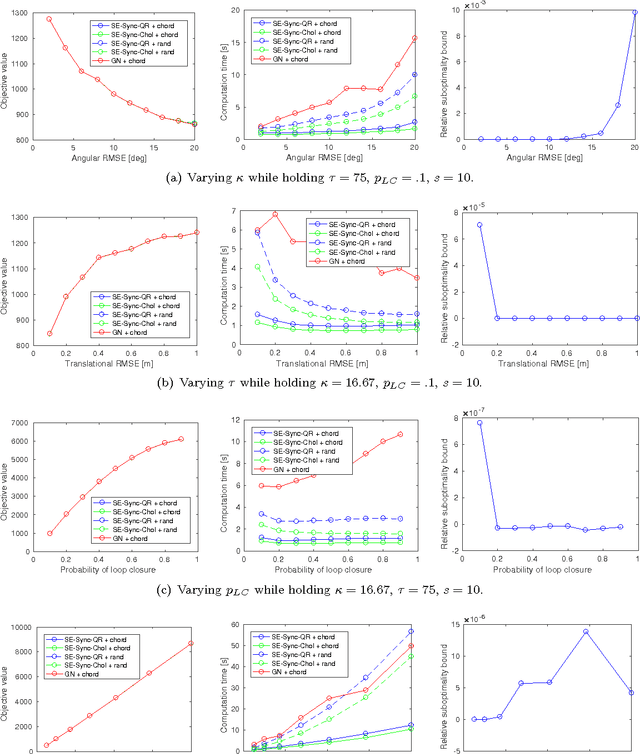
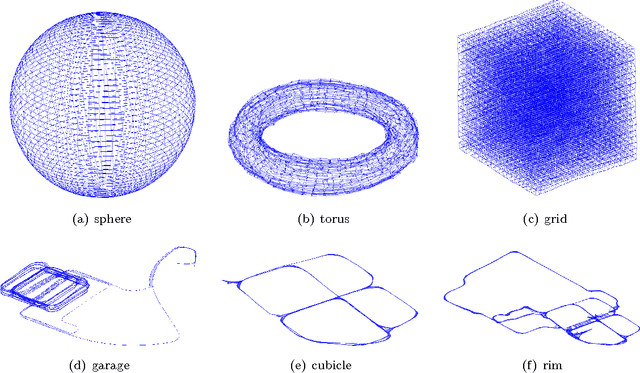
Many geometric estimation problems take the form of synchronization over the special Euclidean group: estimate the values of a set of poses given noisy measurements of a subset of their pairwise relative transforms. This problem is typically formulated as a maximum-likelihood estimation that requires solving a nonconvex nonlinear program, which is computationally intractable in general. Nevertheless, in this paper we present an algorithm that is able to efficiently recover certifiably globally optimal solutions of this estimation problem in a non-adversarial noise regime. The crux of our approach is the development of a semidefinite relaxation of the maximum-likelihood estimation whose minimizer provides the exact MLE so long as the magnitude of the noise corrupting the available measurements falls below a certain critical threshold; furthermore, whenever exactness obtains, it is possible to verify this fact a posteriori, thereby certifying the optimality of the recovered estimate. We develop a specialized optimization scheme for solving large-scale instances of this semidefinite relaxation by exploiting its low-rank, geometric, and graph-theoretic structure to reduce it to an equivalent optimization problem on a low-dimensional Riemannian manifold, and then design a Riemannian truncated-Newton trust-region method to solve this reduction efficiently. We combine this fast optimization approach with a simple rounding procedure to produce our algorithm, SE-Sync. Experimental evaluation on a variety of simulated and real-world pose-graph SLAM datasets shows that SE-Sync is capable of recovering globally optimal solutions when the available measurements are corrupted by noise up to an order of magnitude greater than that typically encountered in robotics applications, and does so at a computational cost that scales comparably with that of direct Newton-type local search techniques.
SE-Sync: A Certifiably Correct Algorithm for Synchronization over the Special Euclidean Group
Feb 05, 2017Many important geometric estimation problems take the form of synchronization over the special Euclidean group: estimate the values of a set of poses given a set of relative measurements between them. This problem is typically formulated as a nonconvex maximum-likelihood estimation that is computationally hard to solve in general. Nevertheless, in this paper we present an algorithm that is able to efficiently recover certifiably globally optimal solutions of the special Euclidean synchronization problem in a non-adversarial noise regime. The crux of our approach is the development of a semidefinite relaxation of the maximum-likelihood estimation whose minimizer provides an exact MLE so long as the magnitude of the noise corrupting the available measurements falls below a certain critical threshold; furthermore, whenever exactness obtains, it is possible to verify this fact a posteriori, thereby certifying the optimality of the recovered estimate. We develop a specialized optimization scheme for solving large-scale instances of this relaxation by exploiting its low-rank, geometric, and graph-theoretic structure to reduce it to an equivalent optimization problem on a low-dimensional Riemannian manifold, and design a truncated-Newton trust-region method to solve this reduction efficiently. Finally, we combine this fast optimization approach with a simple rounding procedure to produce our algorithm, SE-Sync. Experimental evaluation on a variety of simulated and real-world pose-graph SLAM datasets shows that SE-Sync is able to recover certifiably globally optimal solutions when the available measurements are corrupted by noise up to an order of magnitude greater than that typically encountered in robotics and computer vision applications, and does so more than an order of magnitude faster than the Gauss-Newton-based approach that forms the basis of current state-of-the-art techniques.