 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCausalT5K: Diagnosing and Informing Refusal for Trustworthy Causal Reasoning of Skepticism, Sycophancy, Detection-Correction, and Rung Collapse
Feb 09, 2026LLM failures in causal reasoning, including sycophancy, rung collapse, and miscalibrated refusal, are well-documented, yet progress on remediation is slow because no benchmark enables systematic diagnosis. We introduce CausalT5K, a diagnostic benchmark of over 5,000 cases across 10 domains that tests three critical capabilities: (1) detecting rung collapse, where models answer interventional queries with associational evidence; (2) resisting sycophantic drift under adversarial pressure; and (3) generating Wise Refusals that specify missing information when evidence is underdetermined. Unlike synthetic benchmarks, CausalT5K embeds causal traps in realistic narratives and decomposes performance into Utility (sensitivity) and Safety (specificity), revealing failure modes invisible to aggregate accuracy. Developed through a rigorous human-machine collaborative pipeline involving 40 domain experts, iterative cross-validation cycles, and composite verification via rule-based, LLM, and human scoring, CausalT5K implements Pearl's Ladder of Causation as research infrastructure. Preliminary experiments reveal a Four-Quadrant Control Landscape where static audit policies universally fail, a finding that demonstrates CausalT5K's value for advancing trustworthy reasoning systems. Repository: https://github.com/genglongling/CausalT5kBench
OS-Marathon: Benchmarking Computer-Use Agents on Long-Horizon Repetitive Tasks
Jan 28, 2026Long-horizon, repetitive workflows are common in professional settings, such as processing expense reports from receipts and entering student grades from exam papers. These tasks are often tedious for humans since they can extend to extreme lengths proportional to the size of the data to process. However, they are ideal for Computer-Use Agents (CUAs) due to their structured, recurring sub-workflows with logic that can be systematically learned. Identifying the absence of an evaluation benchmark as a primary bottleneck, we establish OS-Marathon, comprising 242 long-horizon, repetitive tasks across 2 domains to evaluate state-of-the-art (SOTA) agents. We then introduce a cost-effective method to construct a condensed demonstration using only few-shot examples to teach agents the underlying workflow logic, enabling them to execute similar workflows effectively on larger, unseen data collections. Extensive experiments demonstrate both the inherent challenges of these tasks and the effectiveness of our proposed method. Project website: https://os-marathon.github.io/.
FlowDrone: Wind Estimation and Gust Rejection on UAVs Using Fast-Response Hot-Wire Flow Sensors
Oct 12, 2022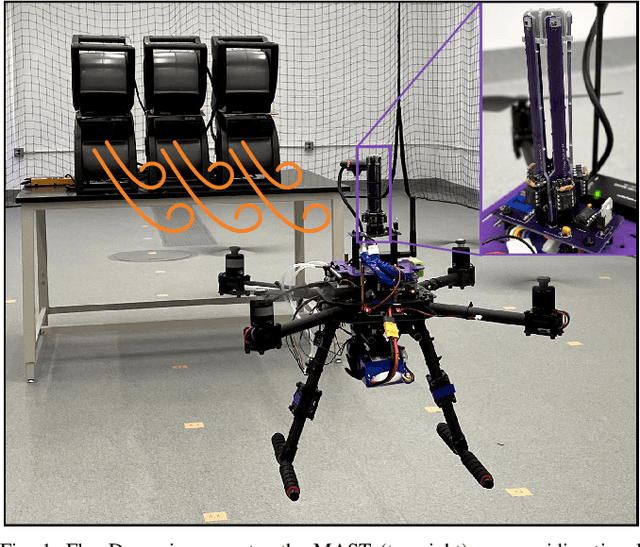
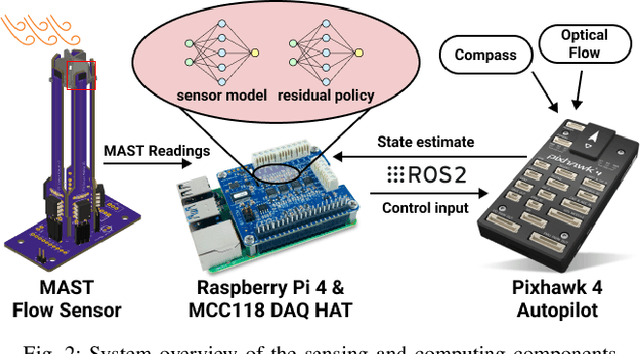
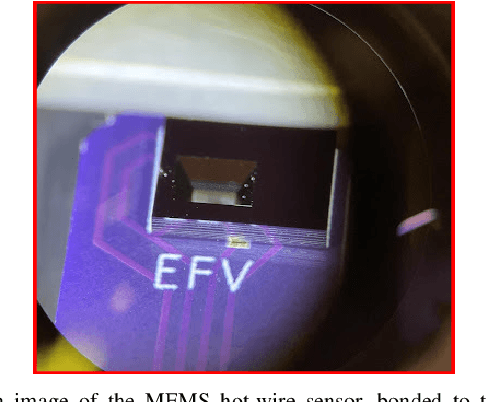
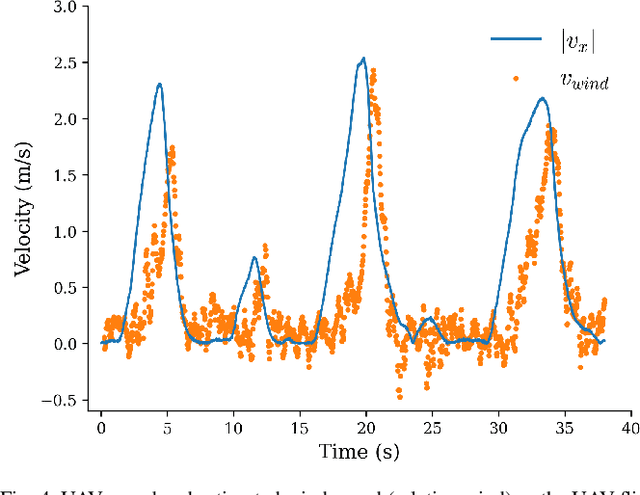
Unmanned aerial vehicles (UAVs) are finding use in applications that place increasing emphasis on robustness to external disturbances including extreme wind. However, traditional multirotor UAV platforms do not directly sense wind; conventional flow sensors are too slow, insensitive, or bulky for widespread integration on UAVs. Instead, drones typically observe the effects of wind indirectly through accumulated errors in position or trajectory tracking. In this work, we integrate a novel flow sensor based on micro-electro-mechanical systems (MEMS) hot-wire technology developed in our prior work onto a multirotor UAV for wind estimation. These sensors are omnidirectional, lightweight, fast, and accurate. In order to achieve superior tracking performance in windy conditions, we train a `wind-aware' residual-based controller via reinforcement learning using simulated wind gusts and their aerodynamic effects on the drone. In extensive hardware experiments, we demonstrate the wind-aware controller outperforming two strong `wind-unaware' baseline controllers in challenging windy conditions.