 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBenchmarks for Deep Off-Policy Evaluation
Mar 30, 2021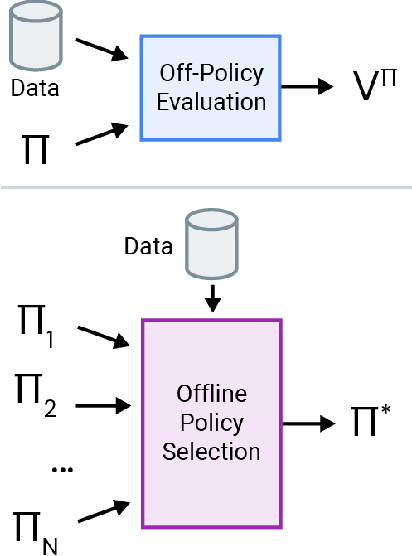
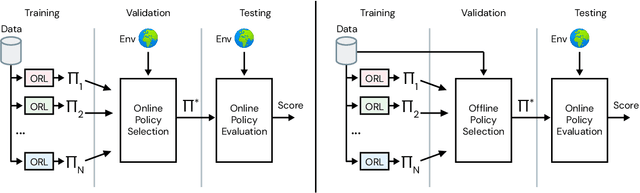
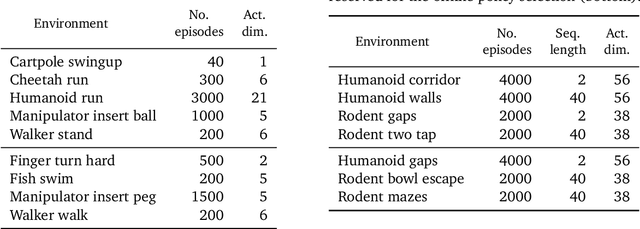
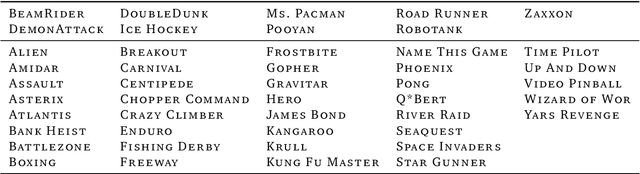
Off-policy evaluation (OPE) holds the promise of being able to leverage large, offline datasets for both evaluating and selecting complex policies for decision making. The ability to learn offline is particularly important in many real-world domains, such as in healthcare, recommender systems, or robotics, where online data collection is an expensive and potentially dangerous process. Being able to accurately evaluate and select high-performing policies without requiring online interaction could yield significant benefits in safety, time, and cost for these applications. While many OPE methods have been proposed in recent years, comparing results between papers is difficult because currently there is a lack of a comprehensive and unified benchmark, and measuring algorithmic progress has been challenging due to the lack of difficult evaluation tasks. In order to address this gap, we present a collection of policies that in conjunction with existing offline datasets can be used for benchmarking off-policy evaluation. Our tasks include a range of challenging high-dimensional continuous control problems, with wide selections of datasets and policies for performing policy selection. The goal of our benchmark is to provide a standardized measure of progress that is motivated from a set of principles designed to challenge and test the limits of existing OPE methods. We perform an evaluation of state-of-the-art algorithms and provide open-source access to our data and code to foster future research in this area.
Robust Constrained Reinforcement Learning for Continuous Control with Model Misspecification
Oct 20, 2020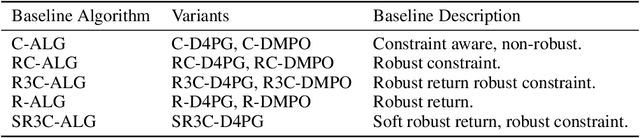
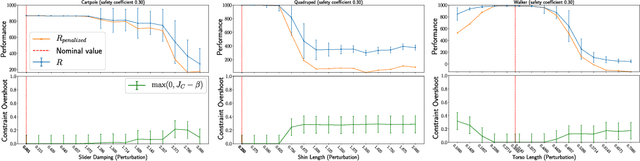
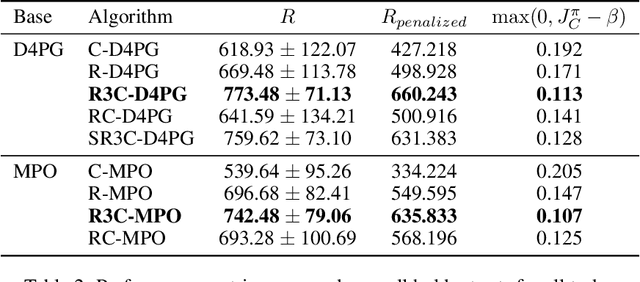
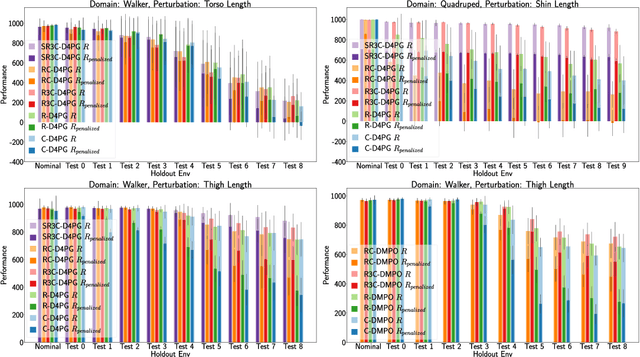
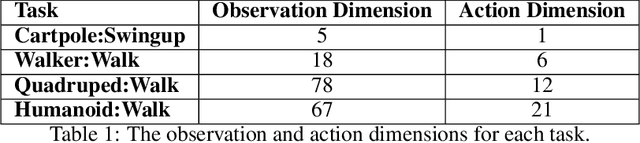
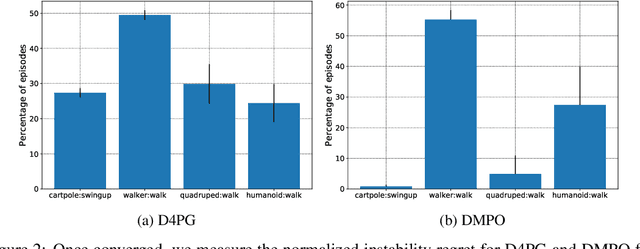
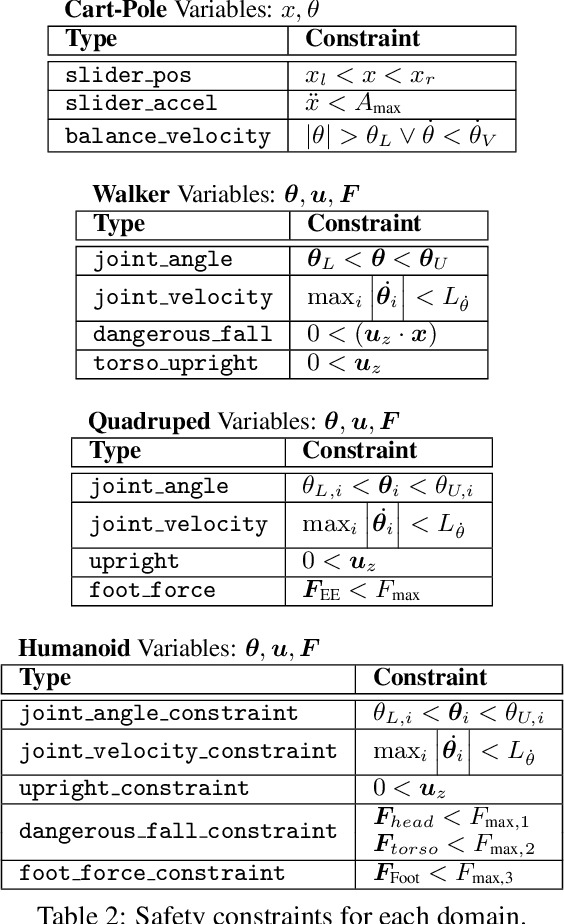
Many real-world physical control systems are required to satisfy constraints upon deployment. Furthermore, real-world systems are often subject to effects such as non-stationarity, wear-and-tear, uncalibrated sensors and so on. Such effects effectively perturb the system dynamics and can cause a policy trained successfully in one domain to perform poorly when deployed to a perturbed version of the same domain. This can affect a policy's ability to maximize future rewards as well as the extent to which it satisfies constraints. We refer to this as constrained model misspecification. We present an algorithm with theoretical guarantees that mitigates this form of misspecification, and showcase its performance in multiple Mujoco tasks from the Real World Reinforcement Learning (RWRL) suite.
Hyperparameter Selection for Offline Reinforcement Learning
Jul 17, 2020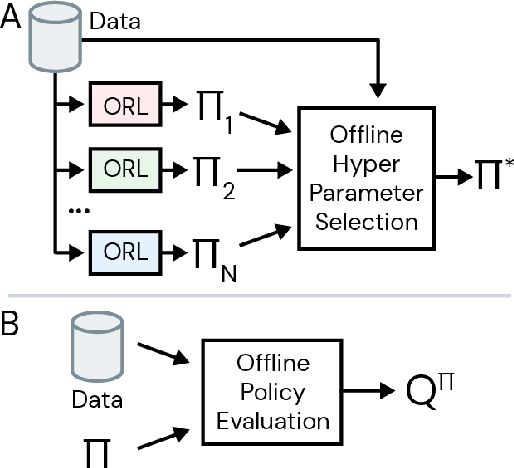
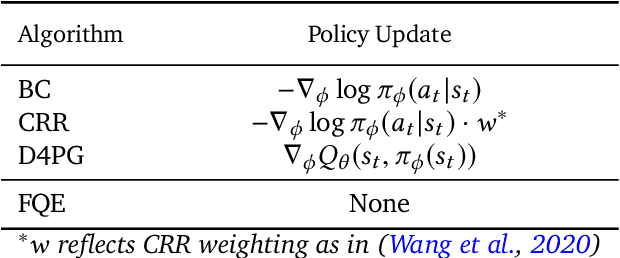
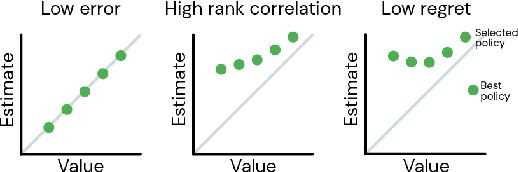
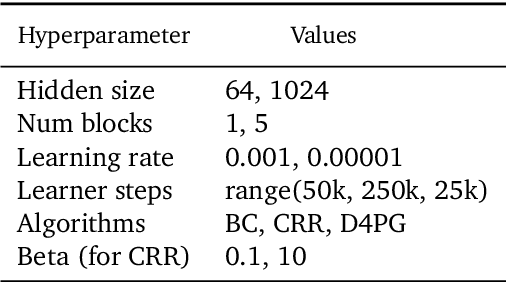
Offline reinforcement learning (RL purely from logged data) is an important avenue for deploying RL techniques in real-world scenarios. However, existing hyperparameter selection methods for offline RL break the offline assumption by evaluating policies corresponding to each hyperparameter setting in the environment. This online execution is often infeasible and hence undermines the main aim of offline RL. Therefore, in this work, we focus on \textit{offline hyperparameter selection}, i.e. methods for choosing the best policy from a set of many policies trained using different hyperparameters, given only logged data. Through large-scale empirical evaluation we show that: 1) offline RL algorithms are not robust to hyperparameter choices, 2) factors such as the offline RL algorithm and method for estimating Q values can have a big impact on hyperparameter selection, and 3) when we control those factors carefully, we can reliably rank policies across hyperparameter choices, and therefore choose policies which are close to the best policy in the set. Overall, our results present an optimistic view that offline hyperparameter selection is within reach, even in challenging tasks with pixel observations, high dimensional action spaces, and long horizon.
RL Unplugged: Benchmarks for Offline Reinforcement Learning
Jul 02, 2020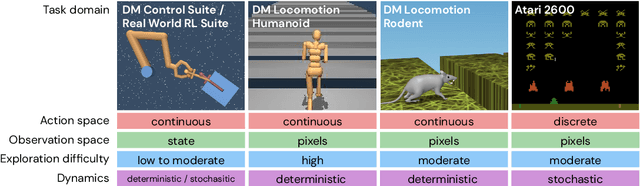
Offline methods for reinforcement learning have a potential to help bridge the gap between reinforcement learning research and real-world applications. They make it possible to learn policies from offline datasets, thus overcoming concerns associated with online data collection in the real-world, including cost, safety, or ethical concerns. In this paper, we propose a benchmark called RL Unplugged to evaluate and compare offline RL methods. RL Unplugged includes data from a diverse range of domains including games ({\em e.g.,} Atari benchmark) and simulated motor control problems ({\em e.g.,} DM Control Suite). The datasets include domains that are partially or fully observable, use continuous or discrete actions, and have stochastic vs. deterministic dynamics. We propose detailed evaluation protocols for each domain in RL Unplugged and provide an extensive analysis of supervised learning and offline RL methods using these protocols. We will release data for all our tasks and open-source all algorithms presented in this paper. We hope that our suite of benchmarks will increase the reproducibility of experiments and make it possible to study challenging tasks with a limited computational budget, thus making RL research both more systematic and more accessible across the community. Moving forward, we view RL Unplugged as a living benchmark suite that will evolve and grow with datasets contributed by the research community and ourselves. Our project page is available on github (https://git.io/JJUhd).
An empirical investigation of the challenges of real-world reinforcement learning
Mar 24, 2020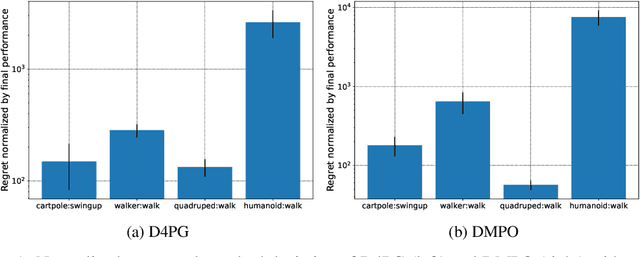
Reinforcement learning (RL) has proven its worth in a series of artificial domains, and is beginning to show some successes in real-world scenarios. However, much of the research advances in RL are hard to leverage in real-world systems due to a series of assumptions that are rarely satisfied in practice. In this work, we identify and formalize a series of independent challenges that embody the difficulties that must be addressed for RL to be commonly deployed in real-world systems. For each challenge, we define it formally in the context of a Markov Decision Process, analyze the effects of the challenge on state-of-the-art learning algorithms, and present some existing attempts at tackling it. We believe that an approach that addresses our set of proposed challenges would be readily deployable in a large number of real world problems. Our proposed challenges are implemented in a suite of continuous control environments called realworldrl-suite which we propose an as an open-source benchmark.
Safe Exploration in Continuous Action Spaces
Jan 26, 2018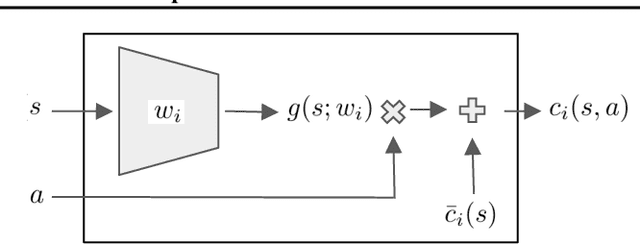
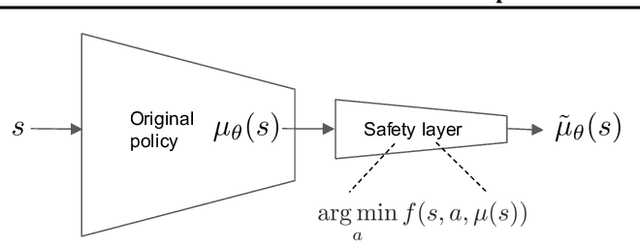
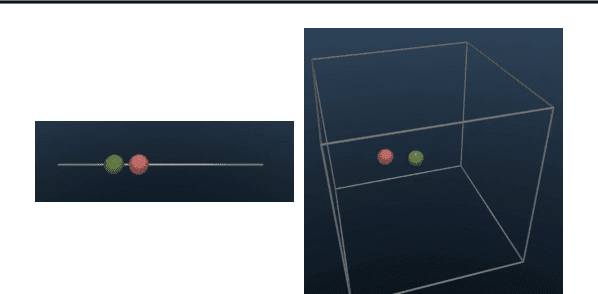
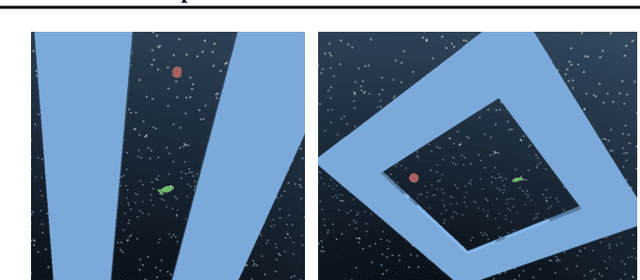
We address the problem of deploying a reinforcement learning (RL) agent on a physical system such as a datacenter cooling unit or robot, where critical constraints must never be violated. We show how to exploit the typically smooth dynamics of these systems and enable RL algorithms to never violate constraints during learning. Our technique is to directly add to the policy a safety layer that analytically solves an action correction formulation per each state. The novelty of obtaining an elegant closed-form solution is attained due to a linearized model, learned on past trajectories consisting of arbitrary actions. This is to mimic the real-world circumstances where data logs were generated with a behavior policy that is implausible to describe mathematically; such cases render the known safety-aware off-policy methods inapplicable. We demonstrate the efficacy of our approach on new representative physics-based environments, and prevail where reward shaping fails by maintaining zero constraint violations.