 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Execution of Graph Algorithms
Oct 23, 2019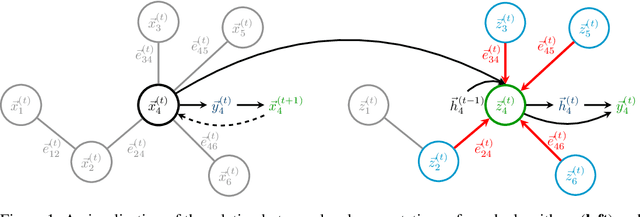
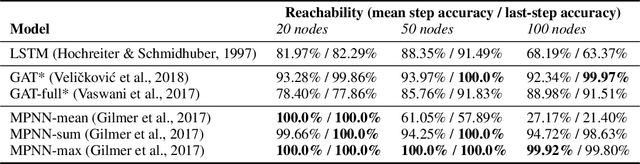
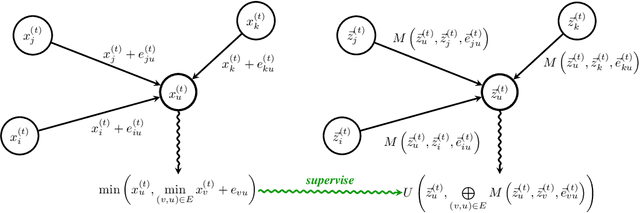
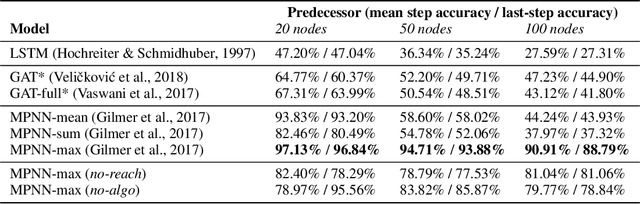
Graph Neural Networks (GNNs) are a powerful representational tool for solving problems on graph-structured inputs. In almost all cases so far, however, they have been applied to directly recovering a final solution from raw inputs, without explicit guidance on how to structure their problem-solving. Here, instead, we focus on learning in the space of algorithms: we train several state-of-the-art GNN architectures to imitate individual steps of classical graph algorithms, parallel (breadth-first search, Bellman-Ford) as well as sequential (Prim's algorithm). As graph algorithms usually rely on making discrete decisions within neighbourhoods, we hypothesise that maximisation-based message passing neural networks are best-suited for such objectives, and validate this claim empirically. We also demonstrate how learning in the space of algorithms can yield new opportunities for positive transfer between tasks---showing how learning a shortest-path algorithm can be substantially improved when simultaneously learning a reachability algorithm.
Fast deep reinforcement learning using online adjustments from the past
Oct 18, 2018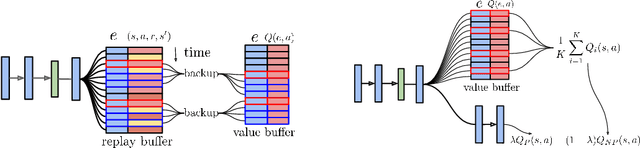
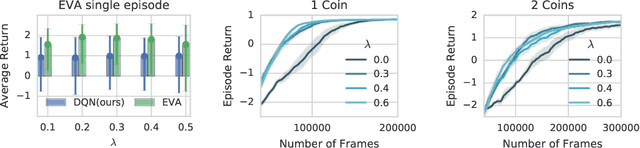
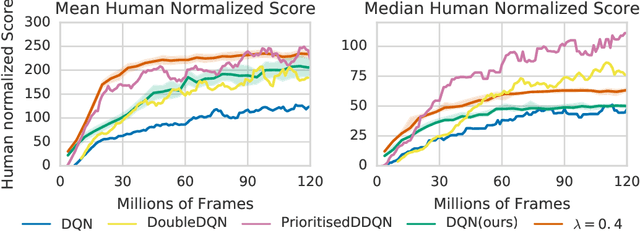
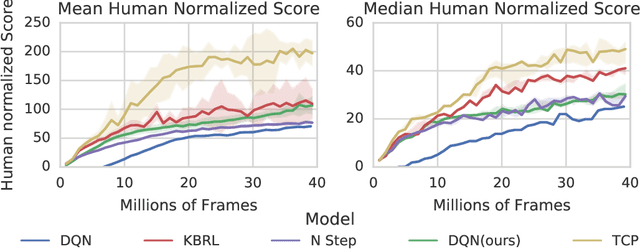
We propose Ephemeral Value Adjusments (EVA): a means of allowing deep reinforcement learning agents to rapidly adapt to experience in their replay buffer. EVA shifts the value predicted by a neural network with an estimate of the value function found by planning over experience tuples from the replay buffer near the current state. EVA combines a number of recent ideas around combining episodic memory-like structures into reinforcement learning agents: slot-based storage, content-based retrieval, and memory-based planning. We show that EVAis performant on a demonstration task and Atari games.
Pushing the bounds of dropout
Sep 27, 2018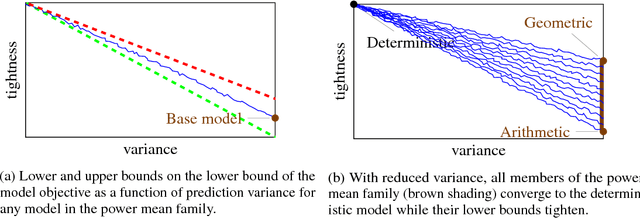

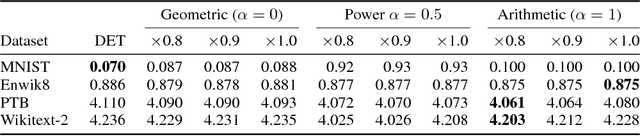
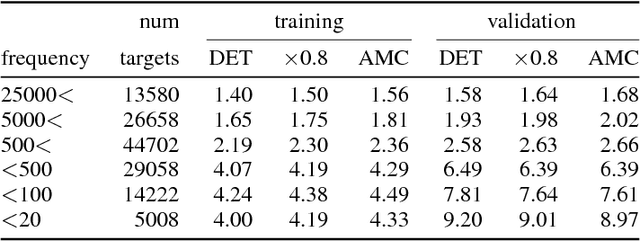
We show that dropout training is best understood as performing MAP estimation concurrently for a family of conditional models whose objectives are themselves lower bounded by the original dropout objective. This discovery allows us to pick any model from this family after training, which leads to a substantial improvement on regularisation-heavy language modelling. The family includes models that compute a power mean over the sampled dropout masks, and their less stochastic subvariants with tighter and higher lower bounds than the fully stochastic dropout objective. We argue that since the deterministic subvariant's bound is equal to its objective, and the highest amongst these models, the predominant view of it as a good approximation to MC averaging is misleading. Rather, deterministic dropout is the best available approximation to the true objective.
Been There, Done That: Meta-Learning with Episodic Recall
Jul 06, 2018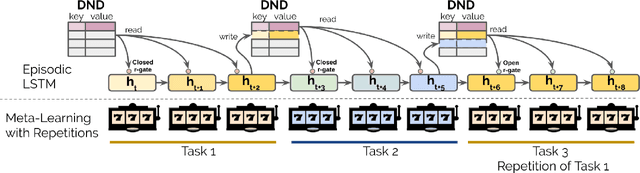
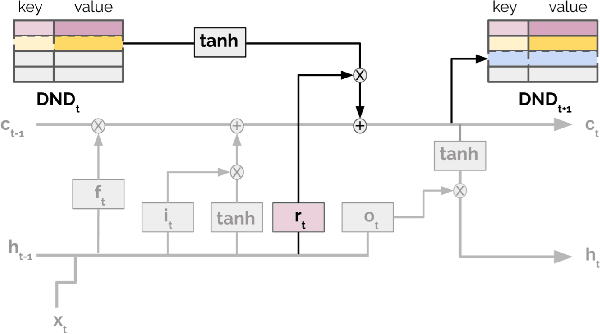
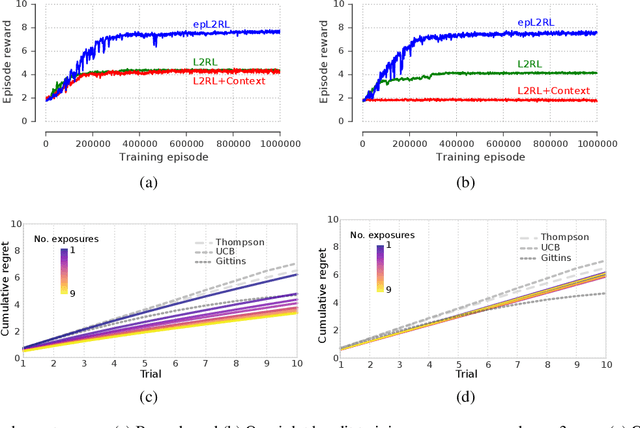
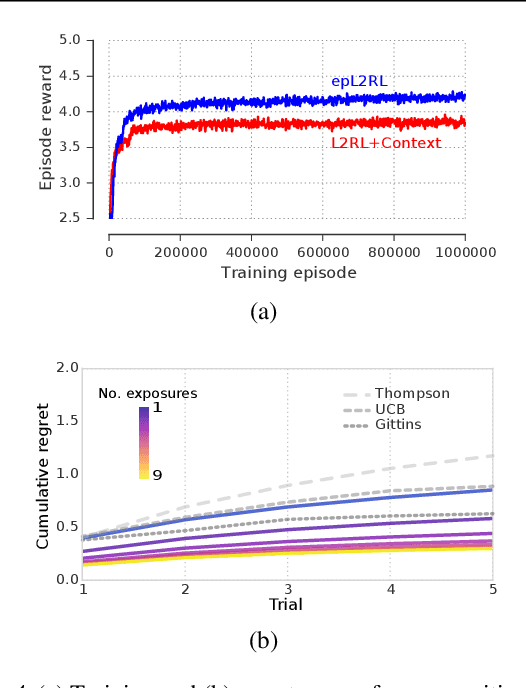
Meta-learning agents excel at rapidly learning new tasks from open-ended task distributions; yet, they forget what they learn about each task as soon as the next begins. When tasks reoccur - as they do in natural environments - metalearning agents must explore again instead of immediately exploiting previously discovered solutions. We propose a formalism for generating open-ended yet repetitious environments, then develop a meta-learning architecture for solving these environments. This architecture melds the standard LSTM working memory with a differentiable neural episodic memory. We explore the capabilities of agents with this episodic LSTM in five meta-learning environments with reoccurring tasks, ranging from bandits to navigation and stochastic sequential decision problems.
DARLA: Improving Zero-Shot Transfer in Reinforcement Learning
Jun 06, 2018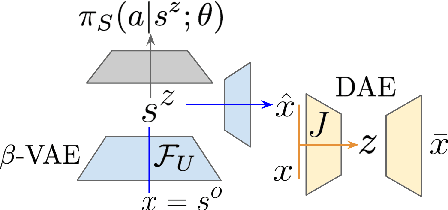
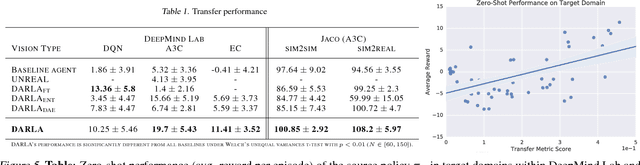
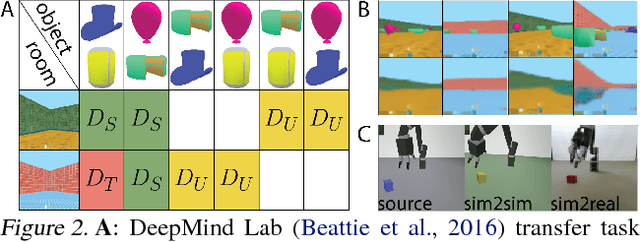
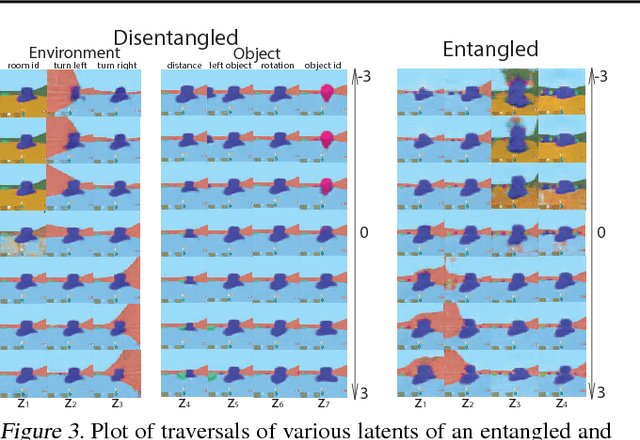
Domain adaptation is an important open problem in deep reinforcement learning (RL). In many scenarios of interest data is hard to obtain, so agents may learn a source policy in a setting where data is readily available, with the hope that it generalises well to the target domain. We propose a new multi-stage RL agent, DARLA (DisentAngled Representation Learning Agent), which learns to see before learning to act. DARLA's vision is based on learning a disentangled representation of the observed environment. Once DARLA can see, it is able to acquire source policies that are robust to many domain shifts - even with no access to the target domain. DARLA significantly outperforms conventional baselines in zero-shot domain adaptation scenarios, an effect that holds across a variety of RL environments (Jaco arm, DeepMind Lab) and base RL algorithms (DQN, A3C and EC).
Bayesian Recurrent Neural Networks
Mar 21, 2018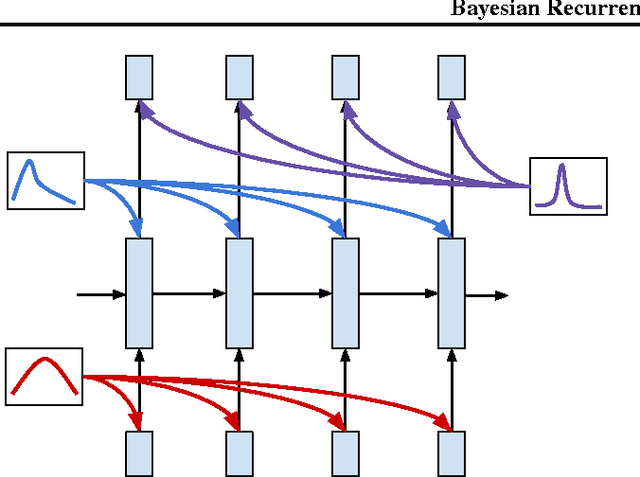
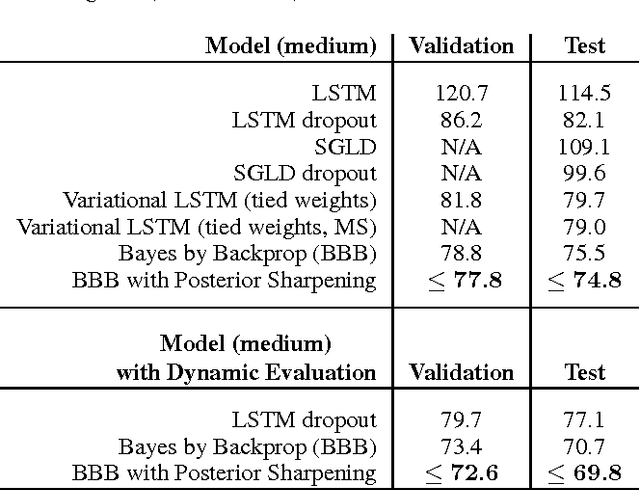
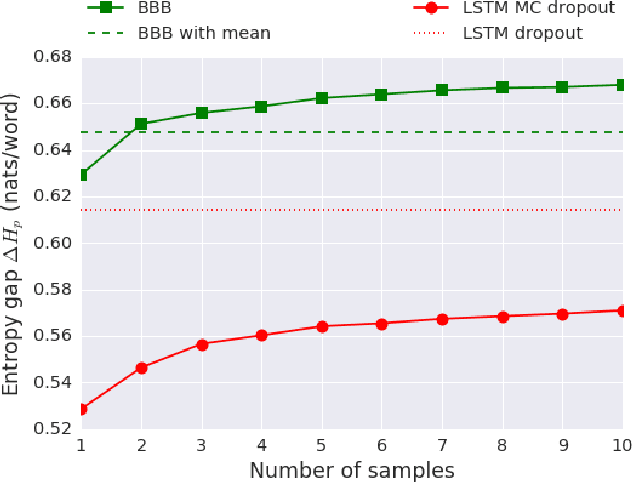
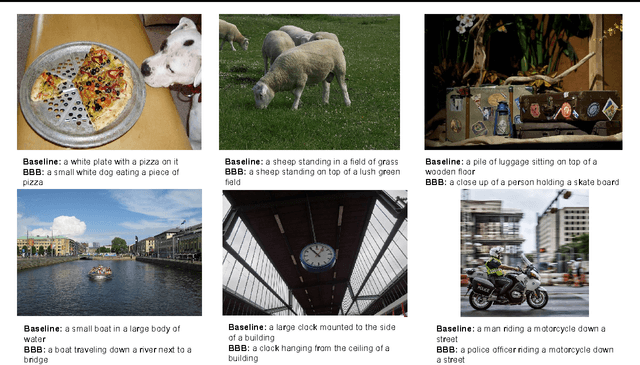
In this work we explore a straightforward variational Bayes scheme for Recurrent Neural Networks. Firstly, we show that a simple adaptation of truncated backpropagation through time can yield good quality uncertainty estimates and superior regularisation at only a small extra computational cost during training, also reducing the amount of parameters by 80\%. Secondly, we demonstrate how a novel kind of posterior approximation yields further improvements to the performance of Bayesian RNNs. We incorporate local gradient information into the approximate posterior to sharpen it around the current batch statistics. We show how this technique is not exclusive to recurrent neural networks and can be applied more widely to train Bayesian neural networks. We also empirically demonstrate how Bayesian RNNs are superior to traditional RNNs on a language modelling benchmark and an image captioning task, as well as showing how each of these methods improve our model over a variety of other schemes for training them. We also introduce a new benchmark for studying uncertainty for language models so future methods can be easily compared.
Memory-based Parameter Adaptation
Feb 28, 2018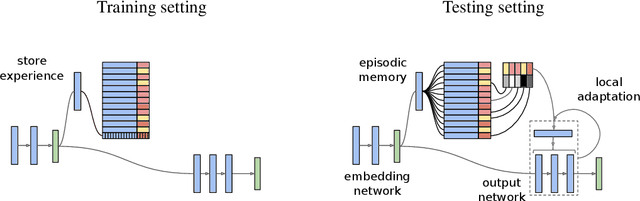
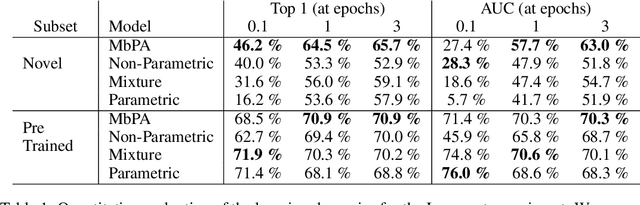
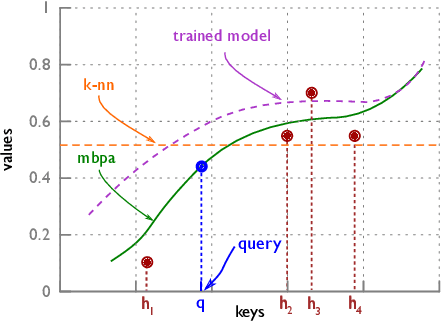
Deep neural networks have excelled on a wide range of problems, from vision to language and game playing. Neural networks very gradually incorporate information into weights as they process data, requiring very low learning rates. If the training distribution shifts, the network is slow to adapt, and when it does adapt, it typically performs badly on the training distribution before the shift. Our method, Memory-based Parameter Adaptation, stores examples in memory and then uses a context-based lookup to directly modify the weights of a neural network. Much higher learning rates can be used for this local adaptation, reneging the need for many iterations over similar data before good predictions can be made. As our method is memory-based, it alleviates several shortcomings of neural networks, such as catastrophic forgetting, fast, stable acquisition of new knowledge, learning with an imbalanced class labels, and fast learning during evaluation. We demonstrate this on a range of supervised tasks: large-scale image classification and language modelling.
Noisy Networks for Exploration
Feb 15, 2018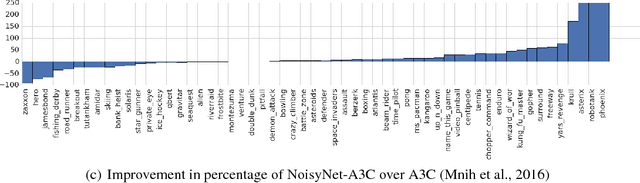
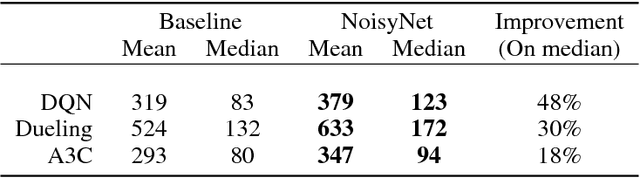
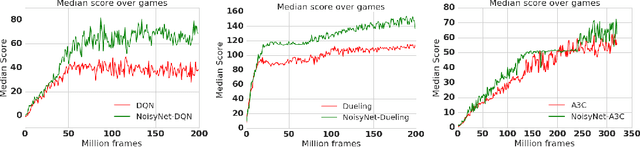
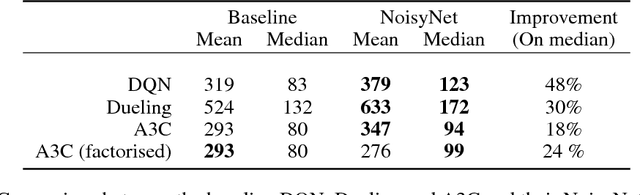
We introduce NoisyNet, a deep reinforcement learning agent with parametric noise added to its weights, and show that the induced stochasticity of the agent's policy can be used to aid efficient exploration. The parameters of the noise are learned with gradient descent along with the remaining network weights. NoisyNet is straightforward to implement and adds little computational overhead. We find that replacing the conventional exploration heuristics for A3C, DQN and dueling agents (entropy reward and $\epsilon$-greedy respectively) with NoisyNet yields substantially higher scores for a wide range of Atari games, in some cases advancing the agent from sub to super-human performance.
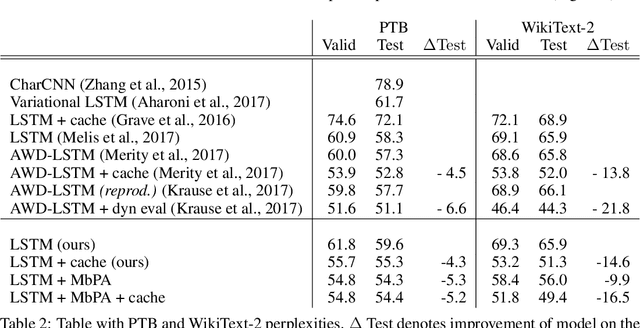
Matching Networks for One Shot Learning
Dec 29, 2017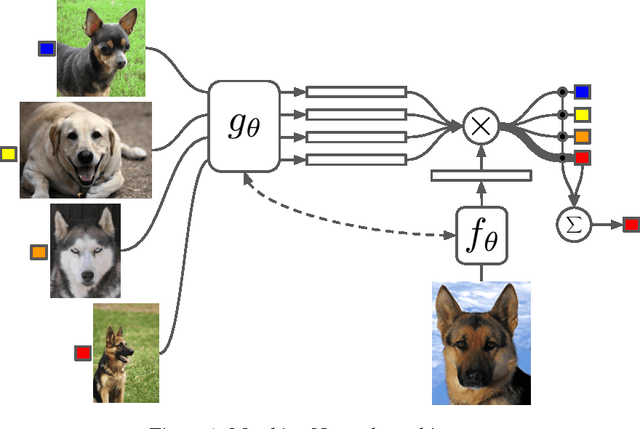
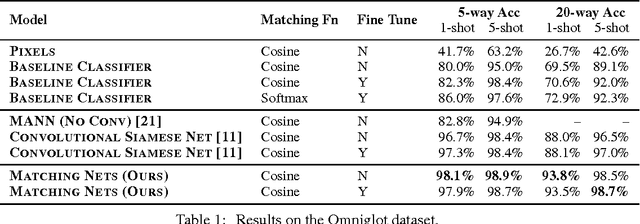
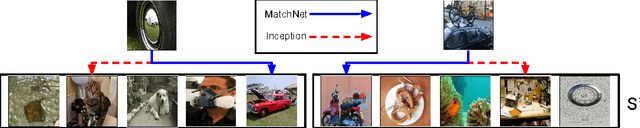
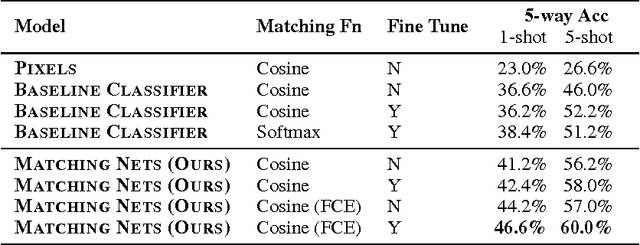
Learning from a few examples remains a key challenge in machine learning. Despite recent advances in important domains such as vision and language, the standard supervised deep learning paradigm does not offer a satisfactory solution for learning new concepts rapidly from little data. In this work, we employ ideas from metric learning based on deep neural features and from recent advances that augment neural networks with external memories. Our framework learns a network that maps a small labelled support set and an unlabelled example to its label, obviating the need for fine-tuning to adapt to new class types. We then define one-shot learning problems on vision (using Omniglot, ImageNet) and language tasks. Our algorithm improves one-shot accuracy on ImageNet from 87.6% to 93.2% and from 88.0% to 93.8% on Omniglot compared to competing approaches. We also demonstrate the usefulness of the same model on language modeling by introducing a one-shot task on the Penn Treebank.
Simple and Scalable Predictive Uncertainty Estimation using Deep Ensembles
Nov 04, 2017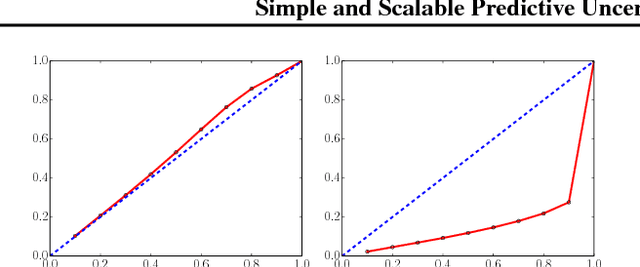
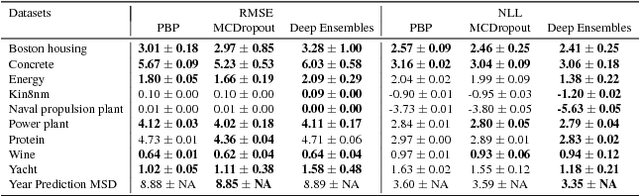

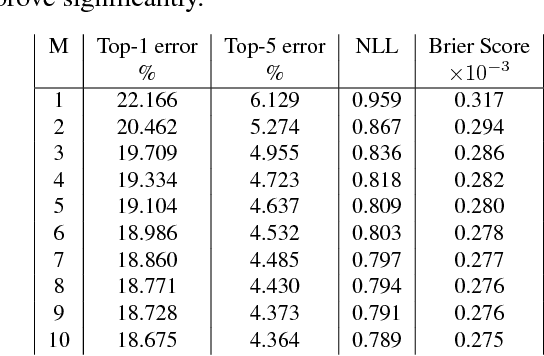
Deep neural networks (NNs) are powerful black box predictors that have recently achieved impressive performance on a wide spectrum of tasks. Quantifying predictive uncertainty in NNs is a challenging and yet unsolved problem. Bayesian NNs, which learn a distribution over weights, are currently the state-of-the-art for estimating predictive uncertainty; however these require significant modifications to the training procedure and are computationally expensive compared to standard (non-Bayesian) NNs. We propose an alternative to Bayesian NNs that is simple to implement, readily parallelizable, requires very little hyperparameter tuning, and yields high quality predictive uncertainty estimates. Through a series of experiments on classification and regression benchmarks, we demonstrate that our method produces well-calibrated uncertainty estimates which are as good or better than approximate Bayesian NNs. To assess robustness to dataset shift, we evaluate the predictive uncertainty on test examples from known and unknown distributions, and show that our method is able to express higher uncertainty on out-of-distribution examples. We demonstrate the scalability of our method by evaluating predictive uncertainty estimates on ImageNet.