 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Sensorless, Inherently Compliant Anthropomorphic Musculoskeletal Hand Driven by Electrohydraulic Actuators
Mar 25, 2026Robotic manipulation in unstructured environments requires end-effectors that combine high kinematic dexterity with physical compliance. While traditional rigid hands rely on complex external sensors for safe interaction, electrohydraulic actuators offer a promising alternative. This paper presents the design, control, and evaluation of a novel musculoskeletal robotic hand architecture powered entirely by remote Peano-HASEL actuators, specifically optimized for safe manipulation. By relocating the actuators to the forearm, we functionally isolate the grasping interface from electrical hazards while maintaining a slim, human-like profile. To address the inherently limited linear contraction of these soft actuators, we integrate a 1:2 pulley routing mechanism that mechanically amplifies tendon displacement. The resulting system prioritizes compliant interaction over high payload capacity, leveraging the intrinsic force-limiting characteristics of the actuators to provide a high level of inherent safety. Furthermore, this physical safety is augmented by the self-sensing nature of the HASEL actuators. By simply monitoring the operating current, we achieve real-time grasp detection and closed-loop contact-aware control without relying on external force transducers or encoders. Experimental results validate the system's dexterity and inherent safety, demonstrating the successful execution of various grasp taxonomies and the non-destructive grasping of highly fragile objects, such as a paper balloon. These findings highlight a significant step toward simplified, inherently compliant soft robotic manipulation.
Learning Actuator-Aware Spectral Submanifolds for Precise Control of Continuum Robots
Mar 24, 2026Continuum robots exhibit high-dimensional, nonlinear dynamics which are often coupled with their actuation mechanism. Spectral submanifold (SSM) reduction has emerged as a leading method for reducing high-dimensional nonlinear dynamical systems to low-dimensional invariant manifolds. Our proposed control-augmented SSMs (caSSMs) extend this methodology by explicitly incorporating control inputs into the state representation, enabling these models to capture nonlinear state-input couplings. Training these models relies solely on controlled decay trajectories of the actuator-augmented state, thereby removing the additional actuation-calibration step commonly needed by prior SSM-for-control methods. We learn a compact caSSM model for a tendon-driven trunk robot, enabling real-time control and reducing open-loop prediction error by 40% compared to existing methods. In closed-loop experiments with model predictive control (MPC), caSSM reduces tracking error by 52%, demonstrating improved performance against Koopman and SSM based MPC and practical deployability on hardware continuum robots.
Nonlinear Spectral Modeling and Control of Soft-Robotic Muscles from Data
Jan 06, 2026Artificial muscles are essential for compliant musculoskeletal robotics but complicate control due to nonlinear multiphysics dynamics. Hydraulically amplified electrostatic (HASEL) actuators, a class of soft artificial muscles, offer high performance but exhibit memory effects and hysteresis. Here we present a data-driven reduction and control strategy grounded in spectral submanifold (SSM) theory. In the adiabatic regime, where inputs vary slowly relative to intrinsic transients, trajectories rapidly converge to a low-dimensional slow manifold. We learn an explicit input-to-output map on this manifold from forced-response trajectories alone, avoiding decay experiments that can trigger hysteresis. We deploy the SSM-based model for real-time control of an antagonistic HASEL-clutch joint. This approach yields a substantial reduction in tracking error compared to feedback-only and feedforward-only baselines under identical settings. This record-and-control workflow enables rapid characterization and high-performance control of soft muscles and muscle-driven joints without detailed physics-based modeling.
Decoupling Torque and Stiffness: A Unified Modeling and Control Framework for Antagonistic Artificial Muscles
Nov 13, 2025



Antagonistic soft actuators built from artificial muscles (PAMs, HASELs, DEAs) promise plant-level torque-stiffness decoupling, yet existing controllers for soft muscles struggle to maintain independent control through dynamic contact transients. We present a unified framework enabling independent torque and stiffness commands in real-time for diverse soft actuator types. Our unified force law captures diverse soft muscle physics in a single model with sub-ms computation, while our cascaded controller with analytical inverse dynamics maintains decoupling despite model errors and disturbances. Using co-contraction/bias coordinates, the controller independently modulates torque via bias and stiffness via co-contraction-replicating biological impedance strategies. Simulation-based validation through contact experiments demonstrates maintained independence: 200x faster settling on soft surfaces, 81% force reduction on rigid surfaces, and stable interaction vs 22-54% stability for fixed policies. This framework provides a foundation for enabling musculoskeletal antagonistic systems to execute adaptive impedance control for safe human-robot interaction.
Stretchable Electrohydraulic Artificial Muscle for Full Motion Ranges in Musculoskeletal Antagonistic Joints
Sep 17, 2024Artificial muscles play a crucial role in musculoskeletal robotics and prosthetics to approximate the force-generating functionality of biological muscle. However, current artificial muscle systems are typically limited to either contraction or extension, not both. This limitation hinders the development of fully functional artificial musculoskeletal systems. We address this challenge by introducing an artificial antagonistic muscle system capable of both contraction and extension. Our design integrates non-stretchable electrohydraulic soft actuators (HASELs) with electrostatic clutches within an antagonistic musculoskeletal framework. This configuration enables an antagonistic joint to achieve a full range of motion without displacement loss due to tendon slack. We implement a synchronization method to coordinate muscle and clutch units, ensuring smooth motion profiles and speeds. This approach facilitates seamless transitions between antagonistic muscles at operational frequencies of up to 3.2 Hz. While our prototype utilizes electrohydraulic actuators, this muscle-clutch concept is adaptable to other non-stretchable artificial muscles, such as McKibben actuators, expanding their capability for extension and full range of motion in antagonistic setups. Our design represents a significant advancement in the development of fundamental components for more functional and efficient artificial musculoskeletal systems, bringing their capabilities closer to those of their biological counterparts.
High-Frequency Capacitive Sensing for Electrohydraulic Soft Actuators
Apr 08, 2024The need for compliant and proprioceptive actuators has grown more evident in pursuing more adaptable and versatile robotic systems. Hydraulically Amplified Self-Healing Electrostatic (HASEL) actuators offer distinctive advantages with their inherent softness and flexibility, making them promising candidates for various robotic tasks, including delicate interactions with humans and animals, biomimetic locomotion, prosthetics, and exoskeletons. This has resulted in a growing interest in the capacitive self-sensing capabilities of HASEL actuators to create miniature displacement estimation circuitry that does not require external sensors. However, achieving HASEL self-sensing for actuation frequencies above 1 Hz and with miniature high-voltage power supplies has remained limited. In this paper, we introduce the F-HASEL actuator, which adds an additional electrode pair used exclusively for capacitive sensing to a Peano-HASEL actuator. We demonstrate displacement estimation of the F-HASEL during high-frequency actuation up to 20 Hz and during external loading using miniaturized circuitry comprised of low-cost off-the-shelf components and a miniature high-voltage power supply. Finally, we propose a circuitry to estimate the displacement of multiple F-HASELs and demonstrate it in a wearable application to track joint rotations of a virtual reality user in real-time.
Self-Sensing Feedback Control of an Electrohydraulic Robotic Shoulder
Apr 05, 2024The human shoulder, with its glenohumeral joint, tendons, ligaments, and muscles, allows for the execution of complex tasks with precision and efficiency. However, current robotic shoulder designs lack the compliance and compactness inherent in their biological counterparts. A major limitation of these designs is their reliance on external sensors like rotary encoders, which restrict mechanical joint design and introduce bulk to the system. To address this constraint, we present a bio-inspired antagonistic robotic shoulder with two degrees of freedom powered by self-sensing hydraulically amplified self-healing electrostatic actuators. Our artificial muscle design decouples the high-voltage electrostatic actuation from the pair of low-voltage self-sensing electrodes. This approach allows for proprioceptive feedback control of trajectories in the task space while eliminating the necessity for any additional sensors. We assess the platform's efficacy by comparing it to a feedback control based on position data provided by a motion capture system. The study demonstrates closed-loop controllable robotic manipulators based on an inherent self-sensing capability of electrohydraulic actuators. The proposed architecture can serve as a basis for complex musculoskeletal joint arrangements.
Real Robot Challenge 2022: Learning Dexterous Manipulation from Offline Data in the Real World
Sep 04, 2023Experimentation on real robots is demanding in terms of time and costs. For this reason, a large part of the reinforcement learning (RL) community uses simulators to develop and benchmark algorithms. However, insights gained in simulation do not necessarily translate to real robots, in particular for tasks involving complex interactions with the environment. The Real Robot Challenge 2022 therefore served as a bridge between the RL and robotics communities by allowing participants to experiment remotely with a real robot - as easily as in simulation. In the last years, offline reinforcement learning has matured into a promising paradigm for learning from pre-collected datasets, alleviating the reliance on expensive online interactions. We therefore asked the participants to learn two dexterous manipulation tasks involving pushing, grasping, and in-hand orientation from provided real-robot datasets. An extensive software documentation and an initial stage based on a simulation of the real set-up made the competition particularly accessible. By giving each team plenty of access budget to evaluate their offline-learned policies on a cluster of seven identical real TriFinger platforms, we organized an exciting competition for machine learners and roboticists alike. In this work we state the rules of the competition, present the methods used by the winning teams and compare their results with a benchmark of state-of-the-art offline RL algorithms on the challenge datasets.
Low Voltage Electrohydraulic Actuators for Untethered Robotics
Jun 01, 2023Rigid robots can be precise in repetitive tasks but struggle in unstructured environments. Nature's versatility in such environments inspires researchers to develop biomimetic robots that incorporate compliant and contracting artificial muscles. Among the recently proposed artificial muscle technologies, electrohydraulic actuators are promising since they offer comparable performance to mammalian muscles in terms of speed and power density. However, they require high driving voltages and have safety concerns due to exposed electrodes. These high voltages lead to either bulky or inefficient driving electronics that make untethered, high-degree-of-freedom bio-inspired robots difficult to realize. Here, we present low voltage electrohydraulic actuators (LEAs) that match mammalian skeletal muscles in average power density (50.5 W/kg) and peak strain rate (971 percent/s) at a driving voltage of just 1100 V. This driving voltage is approx. 5 - 7 times lower compared to other electrohydraulic actuators using paraelectric dielectrics. Furthermore, LEAs are safe to touch, waterproof, and self-clearing, which makes them easy to implement in wearables and robotics. We characterize, model, and physically validate key performance metrics of the actuator and compare its performance to state-of-the-art electrohydraulic designs. Finally, we demonstrate the utility of our actuators on two muscle-based electrohydraulic robots: an untethered soft robotic swimmer and a robotic gripper. We foresee that LEAs can become a key building block for future highly-biomimetic untethered robots and wearables with many independent artificial muscles such as biomimetic hands, faces, or exoskeletons.
Kinematic Control of Redundant Robots with Online Handling of Variable Generalized Hard Constraints
Feb 26, 2022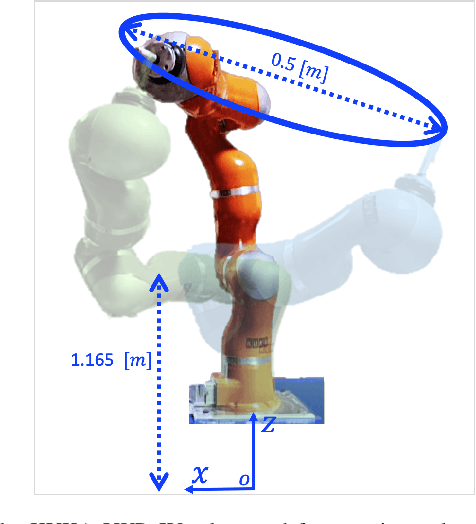
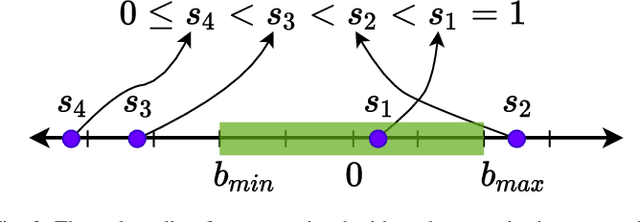
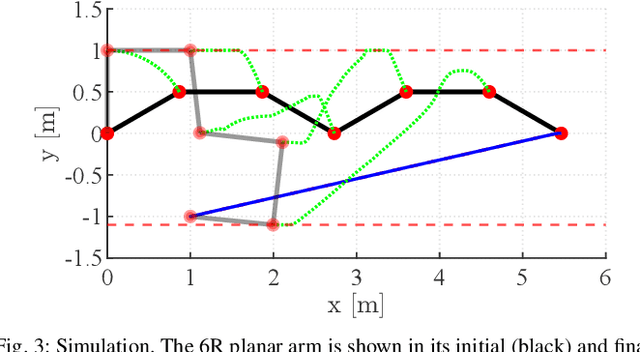
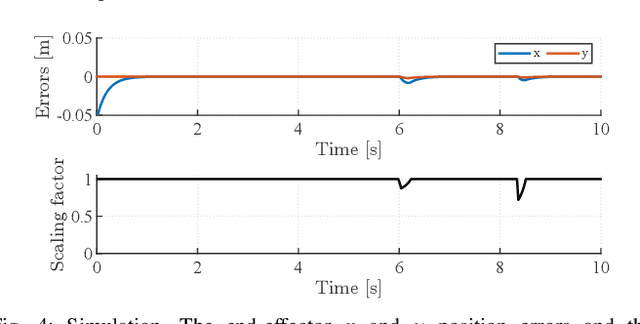
We present a generalized version of the Saturation in the Null Space (SNS) algorithm for the task control of redundant robots when hard inequality constraints are simultaneously present both in the joint and in the Cartesian space. These hard bounds should never be violated, are treated equally and in a unified way by the algorithm, and may also be varied, inserted or deleted online. When a joint/Cartesian bound saturates, the robot redundancy is exploited to continue fulfilling the primary task. If no feasible solution exists, an optimal scaling procedure is applied to enforce directional consistency with the original task. Simulation and experimental results on different robotic systems demonstrate the efficiency of the approach. The proposed algorithm can be viewed as a generic platform that is easily applicable to any robotic application in which robots operate in an unstructured environment and online handling of joint and Cartesian constraints is critical.