 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneral Neural Gauge Fields
May 05, 2023The recent advance of neural fields, such as neural radiance fields, has significantly pushed the boundary of scene representation learning. Aiming to boost the computation efficiency and rendering quality of 3D scenes, a popular line of research maps the 3D coordinate system to another measuring system, e.g., 2D manifolds and hash tables, for modeling neural fields. The conversion of coordinate systems can be typically dubbed as gauge transformation, which is usually a pre-defined mapping function, e.g., orthogonal projection or spatial hash function. This begs a question: can we directly learn a desired gauge transformation along with the neural field in an end-to-end manner? In this work, we extend this problem to a general paradigm with a taxonomy of discrete & continuous cases, and develop an end-to-end learning framework to jointly optimize the gauge transformation and neural fields. To counter the problem that the learning of gauge transformations can collapse easily, we derive a general regularization mechanism from the principle of information conservation during the gauge transformation. To circumvent the high computation cost in gauge learning with regularization, we directly derive an information-invariant gauge transformation which allows to preserve scene information inherently and yield superior performance.
OOD-CV-v2: An extended Benchmark for Robustness to Out-of-Distribution Shifts of Individual Nuisances in Natural Images
Apr 17, 2023



Enhancing the robustness of vision algorithms in real-world scenarios is challenging. One reason is that existing robustness benchmarks are limited, as they either rely on synthetic data or ignore the effects of individual nuisance factors. We introduce OOD-CV-v2, a benchmark dataset that includes out-of-distribution examples of 10 object categories in terms of pose, shape, texture, context and the weather conditions, and enables benchmarking of models for image classification, object detection, and 3D pose estimation. In addition to this novel dataset, we contribute extensive experiments using popular baseline methods, which reveal that: 1) Some nuisance factors have a much stronger negative effect on the performance compared to others, also depending on the vision task. 2) Current approaches to enhance robustness have only marginal effects, and can even reduce robustness. 3) We do not observe significant differences between convolutional and transformer architectures. We believe our dataset provides a rich test bed to study robustness and will help push forward research in this area. Our dataset can be accessed from http://www.ood-cv.org/challenge.html
PoseExaminer: Automated Testing of Out-of-Distribution Robustness in Human Pose and Shape Estimation
Mar 30, 2023Human pose and shape (HPS) estimation methods achieve remarkable results. However, current HPS benchmarks are mostly designed to test models in scenarios that are similar to the training data. This can lead to critical situations in real-world applications when the observed data differs significantly from the training data and hence is out-of-distribution (OOD). It is therefore important to test and improve the OOD robustness of HPS methods. To address this fundamental problem, we develop a simulator that can be controlled in a fine-grained manner using interpretable parameters to explore the manifold of images of human pose, e.g. by varying poses, shapes, and clothes. We introduce a learning-based testing method, termed PoseExaminer, that automatically diagnoses HPS algorithms by searching over the parameter space of human pose images to find the failure modes. Our strategy for exploring this high-dimensional parameter space is a multi-agent reinforcement learning system, in which the agents collaborate to explore different parts of the parameter space. We show that our PoseExaminer discovers a variety of limitations in current state-of-the-art models that are relevant in real-world scenarios but are missed by current benchmarks. For example, it finds large regions of realistic human poses that are not predicted correctly, as well as reduced performance for humans with skinny and corpulent body shapes. In addition, we show that fine-tuning HPS methods by exploiting the failure modes found by PoseExaminer improve their robustness and even their performance on standard benchmarks by a significant margin. The code are available for research purposes.
Scene-Aware 3D Multi-Human Motion Capture from a Single Camera
Jan 12, 2023In this work, we consider the problem of estimating the 3D position of multiple humans in a scene as well as their body shape and articulation from a single RGB video recorded with a static camera. In contrast to expensive marker-based or multi-view systems, our lightweight setup is ideal for private users as it enables an affordable 3D motion capture that is easy to install and does not require expert knowledge. To deal with this challenging setting, we leverage recent advances in computer vision using large-scale pre-trained models for a variety of modalities, including 2D body joints, joint angles, normalized disparity maps, and human segmentation masks. Thus, we introduce the first non-linear optimization-based approach that jointly solves for the absolute 3D position of each human, their articulated pose, their individual shapes as well as the scale of the scene. In particular, we estimate the scene depth and person unique scale from normalized disparity predictions using the 2D body joints and joint angles. Given the per-frame scene depth, we reconstruct a point-cloud of the static scene in 3D space. Finally, given the per-frame 3D estimates of the humans and scene point-cloud, we perform a space-time coherent optimization over the video to ensure temporal, spatial and physical plausibility. We evaluate our method on established multi-person 3D human pose benchmarks where we consistently outperform previous methods and we qualitatively demonstrate that our method is robust to in-the-wild conditions including challenging scenes with people of different sizes.
Super-CLEVR: A Virtual Benchmark to Diagnose Domain Robustness in Visual Reasoning
Dec 01, 2022
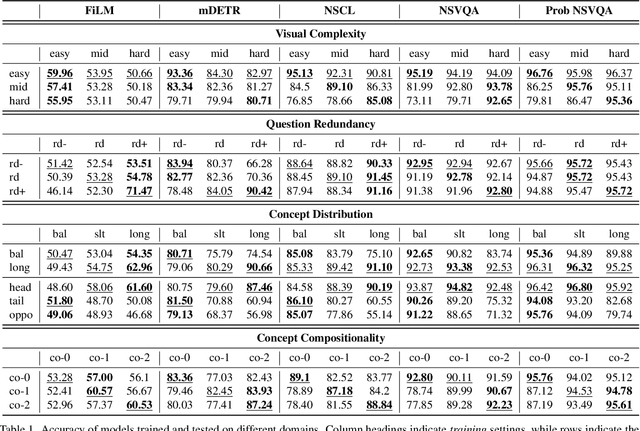
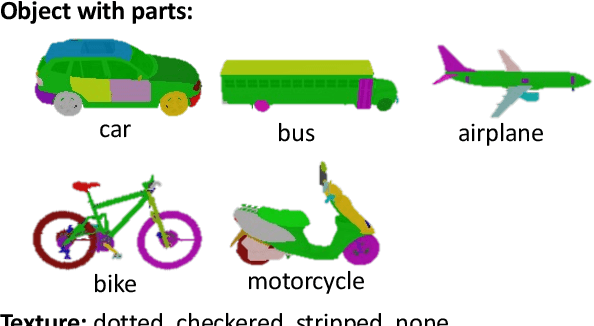
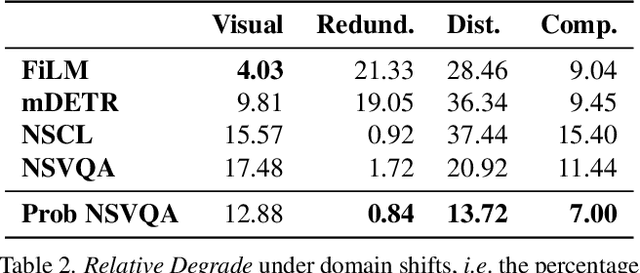
Visual Question Answering (VQA) models often perform poorly on out-of-distribution data and struggle on domain generalization. Due to the multi-modal nature of this task, multiple factors of variation are intertwined, making generalization difficult to analyze. This motivates us to introduce a virtual benchmark, Super-CLEVR, where different factors in VQA domain shifts can be isolated in order that their effects can be studied independently. Four factors are considered: visual complexity, question redundancy, concept distribution and concept compositionality. With controllably generated data, Super-CLEVR enables us to test VQA methods in situations where the test data differs from the training data along each of these axes. We study four existing methods, including two neural symbolic methods NSCL and NSVQA, and two non-symbolic methods FiLM and mDETR; and our proposed method, probabilistic NSVQA (P-NSVQA), which extends NSVQA with uncertainty reasoning. P-NSVQA outperforms other methods on three of the four domain shift factors. Our results suggest that disentangling reasoning and perception, combined with probabilistic uncertainty, form a strong VQA model that is more robust to domain shifts. The dataset and code are released at https://github.com/Lizw14/Super-CLEVR.
State of the Art in Dense Monocular Non-Rigid 3D Reconstruction
Oct 27, 20223D reconstruction of deformable (or non-rigid) scenes from a set of monocular 2D image observations is a long-standing and actively researched area of computer vision and graphics. It is an ill-posed inverse problem, since--without additional prior assumptions--it permits infinitely many solutions leading to accurate projection to the input 2D images. Non-rigid reconstruction is a foundational building block for downstream applications like robotics, AR/VR, or visual content creation. The key advantage of using monocular cameras is their omnipresence and availability to the end users as well as their ease of use compared to more sophisticated camera set-ups such as stereo or multi-view systems. This survey focuses on state-of-the-art methods for dense non-rigid 3D reconstruction of various deformable objects and composite scenes from monocular videos or sets of monocular views. It reviews the fundamentals of 3D reconstruction and deformation modeling from 2D image observations. We then start from general methods--that handle arbitrary scenes and make only a few prior assumptions--and proceed towards techniques making stronger assumptions about the observed objects and types of deformations (e.g. human faces, bodies, hands, and animals). A significant part of this STAR is also devoted to classification and a high-level comparison of the methods, as well as an overview of the datasets for training and evaluation of the discussed techniques. We conclude by discussing open challenges in the field and the social aspects associated with the usage of the reviewed methods.
HandFlow: Quantifying View-Dependent 3D Ambiguity in Two-Hand Reconstruction with Normalizing Flow
Oct 04, 2022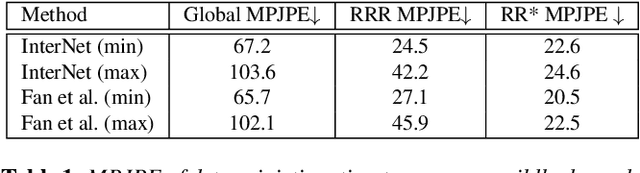
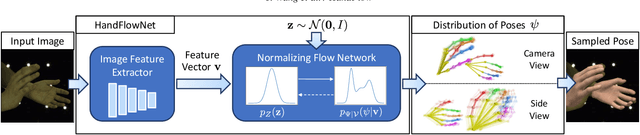
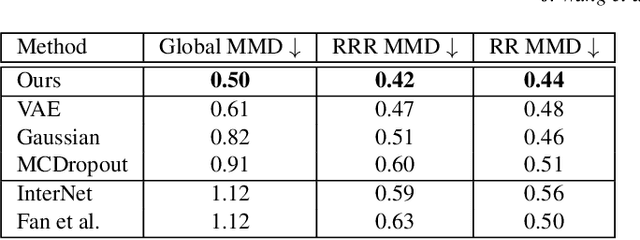
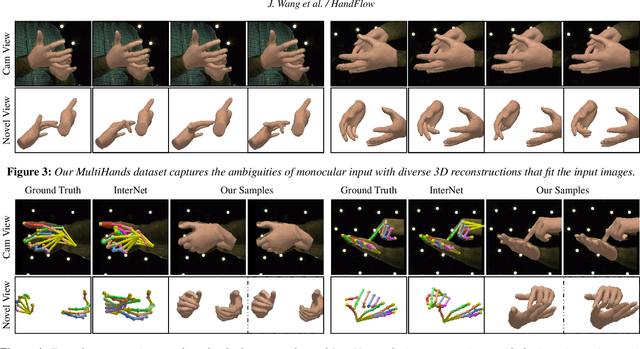
Reconstructing two-hand interactions from a single image is a challenging problem due to ambiguities that stem from projective geometry and heavy occlusions. Existing methods are designed to estimate only a single pose, despite the fact that there exist other valid reconstructions that fit the image evidence equally well. In this paper we propose to address this issue by explicitly modeling the distribution of plausible reconstructions in a conditional normalizing flow framework. This allows us to directly supervise the posterior distribution through a novel determinant magnitude regularization, which is key to varied 3D hand pose samples that project well into the input image. We also demonstrate that metrics commonly used to assess reconstruction quality are insufficient to evaluate pose predictions under such severe ambiguity. To address this, we release the first dataset with multiple plausible annotations per image called MultiHands. The additional annotations enable us to evaluate the estimated distribution using the maximum mean discrepancy metric. Through this, we demonstrate the quality of our probabilistic reconstruction and show that explicit ambiguity modeling is better-suited for this challenging problem.
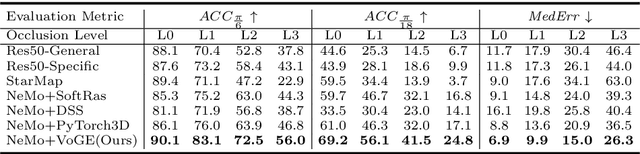
Robust Category-Level 6D Pose Estimation with Coarse-to-Fine Rendering of Neural Features
Sep 12, 2022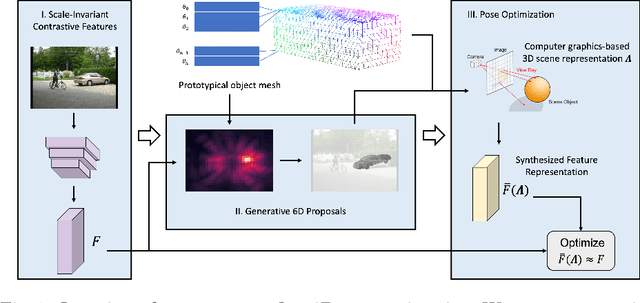
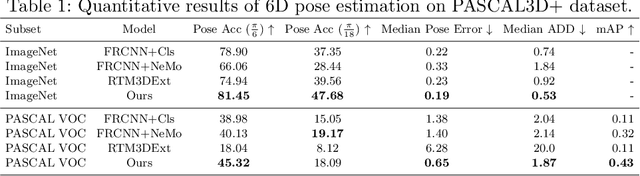
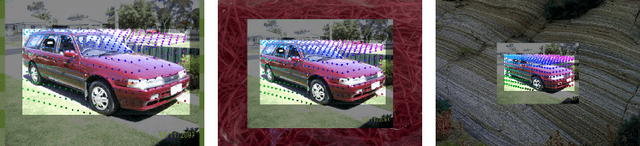

We consider the problem of category-level 6D pose estimation from a single RGB image. Our approach represents an object category as a cuboid mesh and learns a generative model of the neural feature activations at each mesh vertex to perform pose estimation through differentiable rendering. A common problem of rendering-based approaches is that they rely on bounding box proposals, which do not convey information about the 3D rotation of the object and are not reliable when objects are partially occluded. Instead, we introduce a coarse-to-fine optimization strategy that utilizes the rendering process to estimate a sparse set of 6D object proposals, which are subsequently refined with gradient-based optimization. The key to enabling the convergence of our approach is a neural feature representation that is trained to be scale- and rotation-invariant using contrastive learning. Our experiments demonstrate an enhanced category-level 6D pose estimation performance compared to prior work, particularly under strong partial occlusion.
VoGE: A Differentiable Volume Renderer using Gaussian Ellipsoids for Analysis-by-Synthesis
May 30, 2022
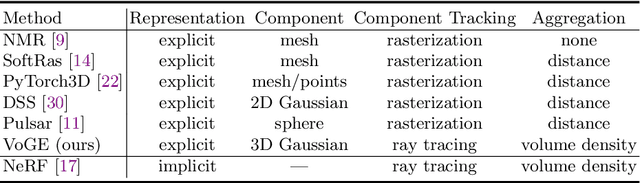
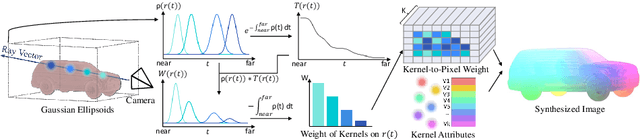
Differentiable rendering allows the application of computer graphics on vision tasks, e.g. object pose and shape fitting, via analysis-by-synthesis, where gradients at occluded regions are important when inverting the rendering process. To obtain those gradients, state-of-the-art (SoTA) differentiable renderers use rasterization to collect a set of nearest components for each pixel and aggregate them based on the viewing distance. In this paper, we propose VoGE, which uses ray tracing to capture nearest components with their volume density distributions on the rays and aggregates via integral of the volume densities based on Gaussian ellipsoids, which brings more efficient and stable gradients. To efficiently render via VoGE, we propose an approximate close-form solution for the volume density aggregation and a coarse-to-fine rendering strategy. Finally, we provide a CUDA implementation of VoGE, which gives a competitive rendering speed in comparison to PyTorch3D. Quantitative and qualitative experiment results show VoGE outperforms SoTA counterparts when applied to various vision tasks,e.g., object pose estimation, shape/texture fitting, and occlusion reasoning. The VoGE library and demos are available at https://github.com/Angtian/VoGE.
SwapMix: Diagnosing and Regularizing the Over-Reliance on Visual Context in Visual Question Answering
Apr 05, 2022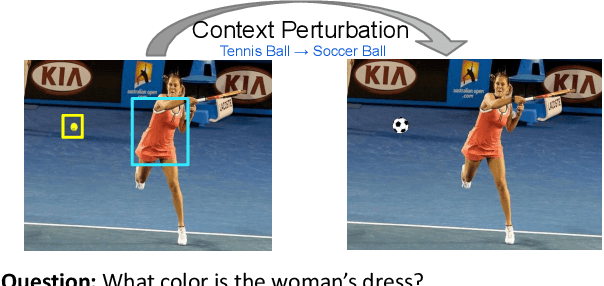

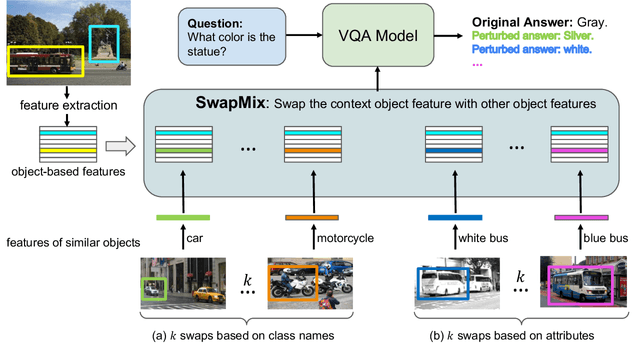
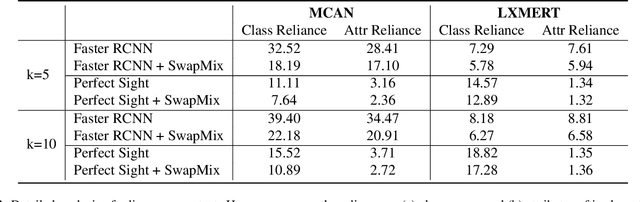
While Visual Question Answering (VQA) has progressed rapidly, previous works raise concerns about robustness of current VQA models. In this work, we study the robustness of VQA models from a novel perspective: visual context. We suggest that the models over-rely on the visual context, i.e., irrelevant objects in the image, to make predictions. To diagnose the model's reliance on visual context and measure their robustness, we propose a simple yet effective perturbation technique, SwapMix. SwapMix perturbs the visual context by swapping features of irrelevant context objects with features from other objects in the dataset. Using SwapMix we are able to change answers to more than 45 % of the questions for a representative VQA model. Additionally, we train the models with perfect sight and find that the context over-reliance highly depends on the quality of visual representations. In addition to diagnosing, SwapMix can also be applied as a data augmentation strategy during training in order to regularize the context over-reliance. By swapping the context object features, the model reliance on context can be suppressed effectively. Two representative VQA models are studied using SwapMix: a co-attention model MCAN and a large-scale pretrained model LXMERT. Our experiments on the popular GQA dataset show the effectiveness of SwapMix for both diagnosing model robustness and regularizing the over-reliance on visual context. The code for our method is available at https://github.com/vipulgupta1011/swapmix