 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot Utility Models: General Policies for Zero-Shot Deployment in New Environments
Sep 09, 2024Robot models, particularly those trained with large amounts of data, have recently shown a plethora of real-world manipulation and navigation capabilities. Several independent efforts have shown that given sufficient training data in an environment, robot policies can generalize to demonstrated variations in that environment. However, needing to finetune robot models to every new environment stands in stark contrast to models in language or vision that can be deployed zero-shot for open-world problems. In this work, we present Robot Utility Models (RUMs), a framework for training and deploying zero-shot robot policies that can directly generalize to new environments without any finetuning. To create RUMs efficiently, we develop new tools to quickly collect data for mobile manipulation tasks, integrate such data into a policy with multi-modal imitation learning, and deploy policies on-device on Hello Robot Stretch, a cheap commodity robot, with an external mLLM verifier for retrying. We train five such utility models for opening cabinet doors, opening drawers, picking up napkins, picking up paper bags, and reorienting fallen objects. Our system, on average, achieves 90% success rate in unseen, novel environments interacting with unseen objects. Moreover, the utility models can also succeed in different robot and camera set-ups with no further data, training, or fine-tuning. Primary among our lessons are the importance of training data over training algorithm and policy class, guidance about data scaling, necessity for diverse yet high-quality demonstrations, and a recipe for robot introspection and retrying to improve performance on individual environments. Our code, data, models, hardware designs, as well as our experiment and deployment videos are open sourced and can be found on our project website: https://robotutilitymodels.com
Towards Open-World Mobile Manipulation in Homes: Lessons from the Neurips 2023 HomeRobot Open Vocabulary Mobile Manipulation Challenge
Jul 09, 2024



In order to develop robots that can effectively serve as versatile and capable home assistants, it is crucial for them to reliably perceive and interact with a wide variety of objects across diverse environments. To this end, we proposed Open Vocabulary Mobile Manipulation as a key benchmark task for robotics: finding any object in a novel environment and placing it on any receptacle surface within that environment. We organized a NeurIPS 2023 competition featuring both simulation and real-world components to evaluate solutions to this task. Our baselines on the most challenging version of this task, using real perception in simulation, achieved only an 0.8% success rate; by the end of the competition, the best participants achieved an 10.8\% success rate, a 13x improvement. We observed that the most successful teams employed a variety of methods, yet two common threads emerged among the best solutions: enhancing error detection and recovery, and improving the integration of perception with decision-making processes. In this paper, we detail the results and methodologies used, both in simulation and real-world settings. We discuss the lessons learned and their implications for future research. Additionally, we compare performance in real and simulated environments, emphasizing the necessity for robust generalization to novel settings.
The Design of Stretch: A Compact, Lightweight Mobile Manipulator for Indoor Human Environments
Sep 22, 2021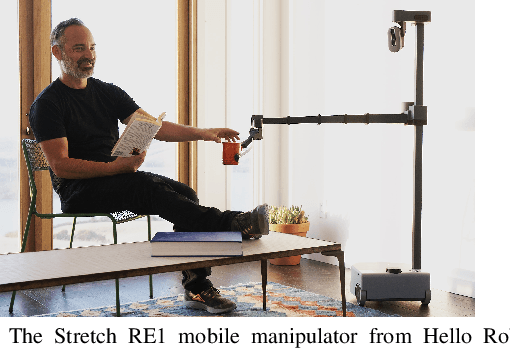
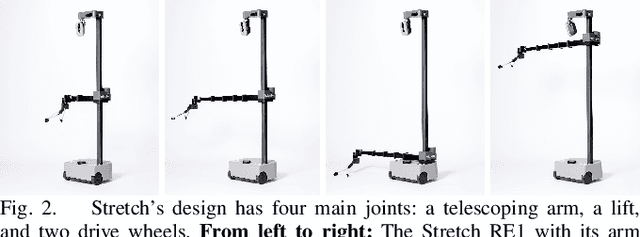

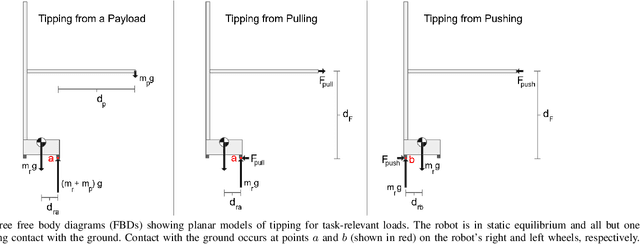
Mobile manipulators for indoor human environments can serve as versatile devices that perform a variety of tasks, yet adoption of this technology has been limited. Reducing size, weight, and cost could facilitate adoption, but risks restricting capabilities. We present a novel design that reduces size, weight, and cost, while still performing a variety of tasks. The core design consists of a two-wheeled differential-drive mobile base, a lift, and a telescoping arm configured to achieve Cartesian motion at the end of the arm. Design extensions include a 1 degree-of-freedom (DOF) wrist to stow a tool, a 2-DOF dexterous wrist to pitch and roll a tool, and a compliant gripper. We justify our design with mathematical models of static stability that relate the robot's size and weight to its workspace, payload, and applied forces. We also provide empirical support by teleoperating and autonomously controlling a commercial robot based on our design (the Stretch RE1 from Hello Robot Inc.) to perform tasks in real homes.
Manipulation in Clutter with Whole-Arm Tactile Sensing
Apr 23, 2013
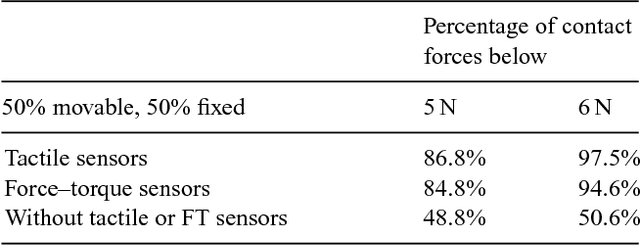
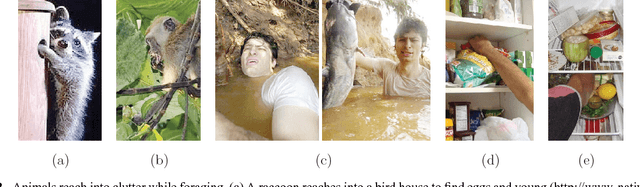
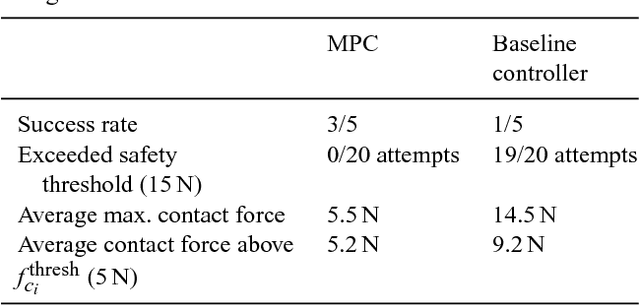
We begin this paper by presenting our approach to robot manipulation, which emphasizes the benefits of making contact with the world across the entire manipulator. We assume that low contact forces are benign, and focus on the development of robots that can control their contact forces during goal-directed motion. Inspired by biology, we assume that the robot has low-stiffness actuation at its joints, and tactile sensing across the entire surface of its manipulator. We then describe a novel controller that exploits these assumptions. The controller only requires haptic sensing and does not need an explicit model of the environment prior to contact. It also handles multiple contacts across the surface of the manipulator. The controller uses model predictive control (MPC) with a time horizon of length one, and a linear quasi-static mechanical model that it constructs at each time step. We show that this controller enables both real and simulated robots to reach goal locations in high clutter with low contact forces. Our experiments include tests using a real robot with a novel tactile sensor array on its forearm reaching into simulated foliage and a cinder block. In our experiments, robots made contact across their entire arms while pushing aside movable objects, deforming compliant objects, and perceiving the world.
* This is the first version of a paper that we submitted to the International Journal of Robotics Research on December 31, 2011 and uploaded to our website on January 16, 2012