 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Greedy Clustering-Based Algorithm for Improving Multi-point Robotic Manipulation Sequencing
May 05, 2022
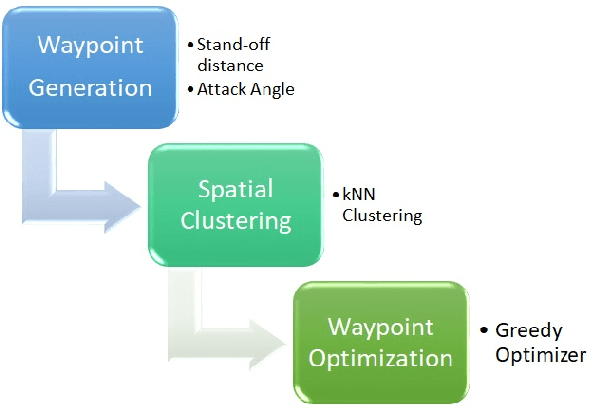
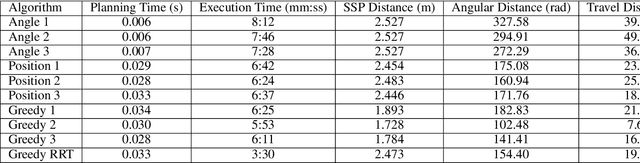
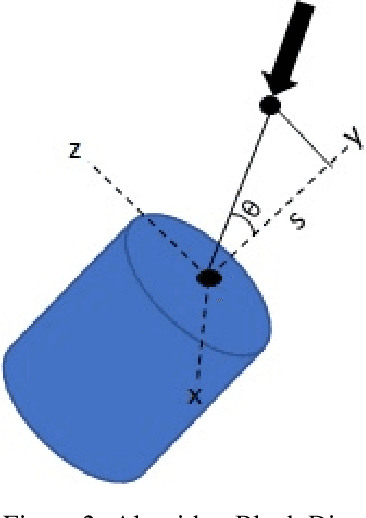
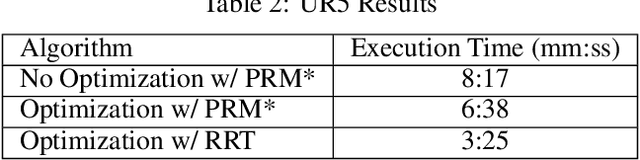
The problem of optimizing a sequence of tasks for a robot, also known as multi-point manufacturing, is a well-studied problem. Many of these solutions use a variant of the Traveling Salesman Problem (TSP) and seek to find the minimum distance or time solution. Optimal solution methods struggle to run in real-time and scale for larger problems. In online planning applications where the tasks being executed are fast, the computational time to optimize the ordering can dominate the total execution time. The optimal solution in this application is defined as the computational time for planning plus the execution time. Therefore, the algorithm presented here balances the quality of the solution with the total execution time by finding a locally optimal sequence. The algorithm is comprised of waypoint generation, spatial clustering, and waypoint optimization. Significant improvements in time reduction were seen and validated against a base case algorithm in simulation and on a real UR5 robot.
Randomized Neural Networks for Forecasting Time Series with Multiple Seasonality
Jul 04, 2021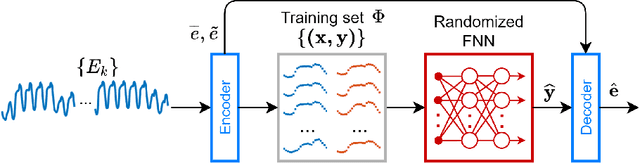
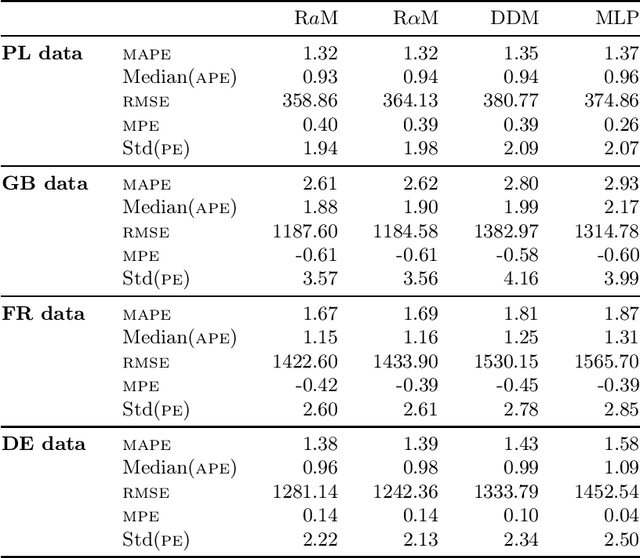
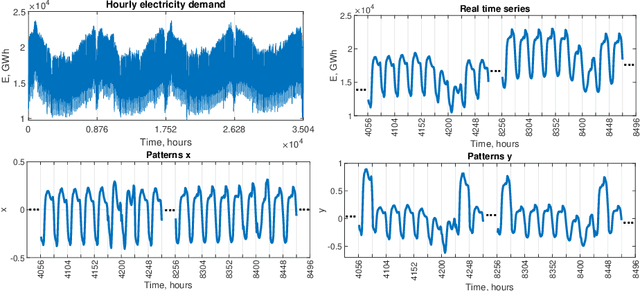
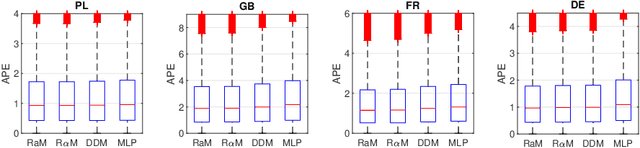
This work contributes to the development of neural forecasting models with novel randomization-based learning methods. These methods improve the fitting abilities of the neural model, in comparison to the standard method, by generating network parameters in accordance with the data and target function features. A pattern-based representation of time series makes the proposed approach useful for forecasting time series with multiple seasonality. In the simulation study, we evaluate the performance of the proposed models and find that they can compete in terms of forecasting accuracy with fully-trained networks. Extremely fast and easy training, simple architecture, ease of implementation, high accuracy as well as dealing with nonstationarity and multiple seasonality in time series make the proposed model very attractive for a wide range of complex time series forecasting problems.
Longitudinal detection of new MS lesions using Deep Learning
Jun 16, 2022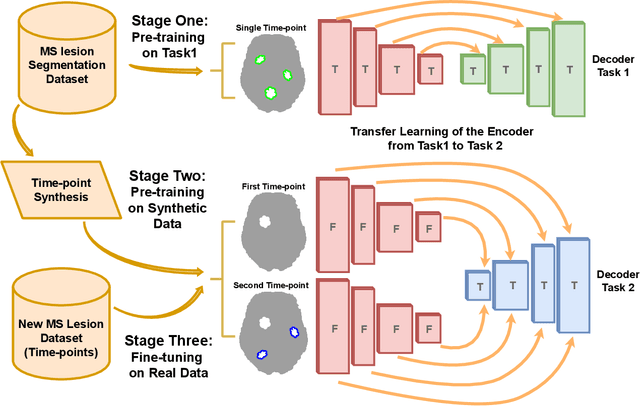

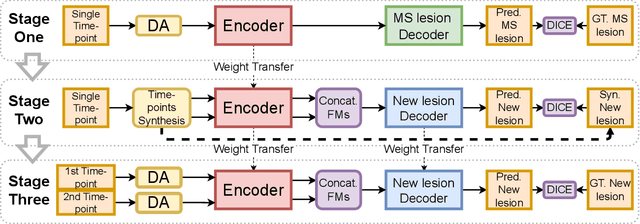
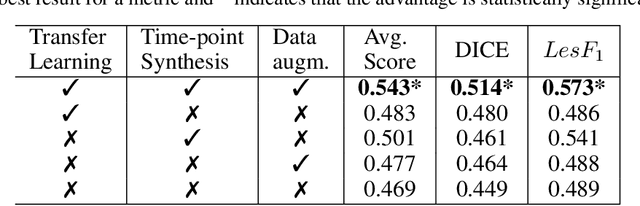
The detection of new multiple sclerosis (MS) lesions is an important marker of the evolution of the disease. The applicability of learning-based methods could automate this task efficiently. However, the lack of annotated longitudinal data with new-appearing lesions is a limiting factor for the training of robust and generalizing models. In this work, we describe a deep-learning-based pipeline addressing the challenging task of detecting and segmenting new MS lesions. First, we propose to use transfer-learning from a model trained on a segmentation task using single time-points. Therefore, we exploit knowledge from an easier task and for which more annotated datasets are available. Second, we propose a data synthesis strategy to generate realistic longitudinal time-points with new lesions using single time-point scans. In this way, we pretrain our detection model on large synthetic annotated datasets. Finally, we use a data-augmentation technique designed to simulate data diversity in MRI. By doing that, we increase the size of the available small annotated longitudinal datasets. Our ablation study showed that each contribution lead to an enhancement of the segmentation accuracy. Using the proposed pipeline, we obtained the best score for the segmentation and the detection of new MS lesions in the MSSEG2 MICCAI challenge.
Advances of Artificial Intelligence in Classical and Novel Spectroscopy-Based Approaches for Cancer Diagnostics. A Review
Aug 08, 2022
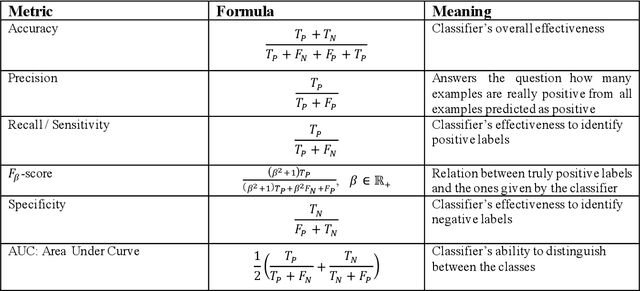
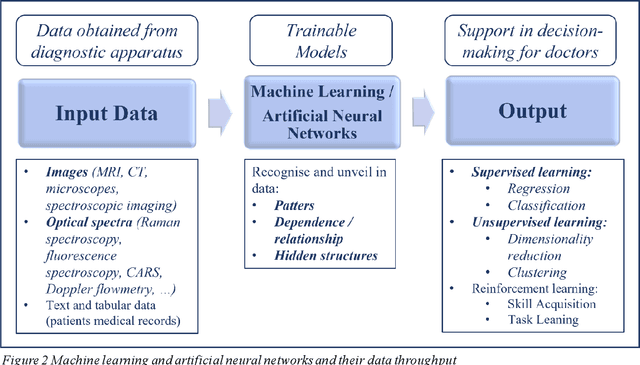
Cancer is one of the leading causes of death worldwide. Fast and safe early-stage, pre- and intra-operative diagnostics can significantly contribute to successful cancer identification and treatment. Artificial intelligence has played an increasing role in the enhancement of cancer diagnostics techniques in the last 15 years. This review covers the advances of artificial intelligence applications in well-established techniques such as MRI and CT. Also, it shows its high potential in combination with optical spectroscopy-based approaches that are under development for mobile, ultra-fast, and low-invasive diagnostics. I will show how spectroscopy-based approaches can reduce the time of tissue preparation for pathological analysis by making thin-slicing or haematoxylin-and-eosin staining obsolete. I will present examples of spectroscopic tools for fast and low-invasive ex- and in-vivo tissue classification for the determination of a tumour and its boundaries. Also, I will discuss that, contrary to MRI and CT, spectroscopic measurements do not require the administration of chemical agents to enhance the quality of cancer imaging which contributes to the development of more secure diagnostic methods. Overall, we will see that the combination of spectroscopy and artificial intelligence constitutes a highly promising and fast-developing field of medical technology that will soon augment available cancer diagnostic methods.
Automaton-Guided Control Synthesis for Signal Temporal Logic Specifications
Jul 17, 2022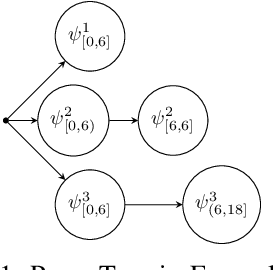
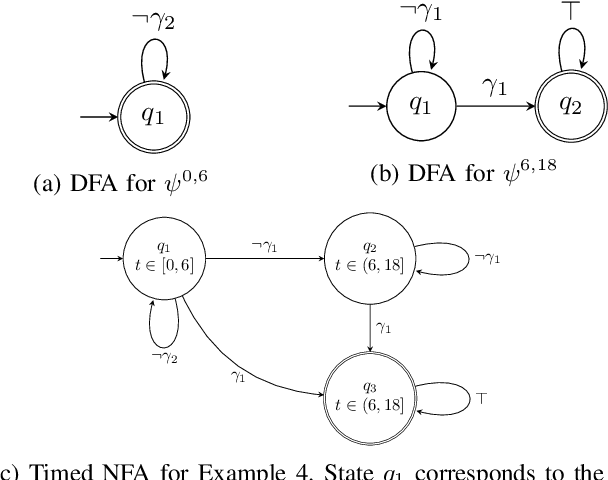
This paper presents an algorithmic framework for control synthesis of continuous dynamical systems subject to signal temporal logic (STL) specifications. We propose a novel algorithm to obtain a time-partitioned finite automaton from an STL specification, and introduce a multi-layered framework that utilizes this automaton to guide a sampling-based search tree both spatially and temporally. Our approach is able to synthesize a controller for nonlinear dynamics and polynomial predicate functions. We prove the correctness and probabilistic completeness of our algorithm, and illustrate the efficiency and efficacy of our framework on several case studies. Our results show an order of magnitude speedup over the state of the art.
Automatic Seizure Detection Using the Pulse Transit Time
Jul 13, 2021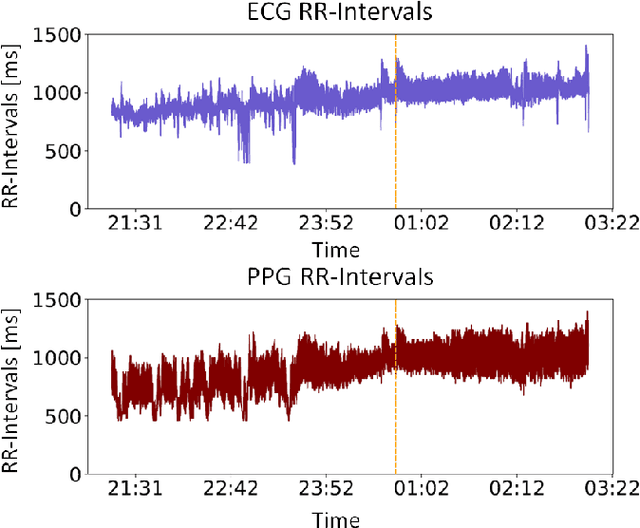
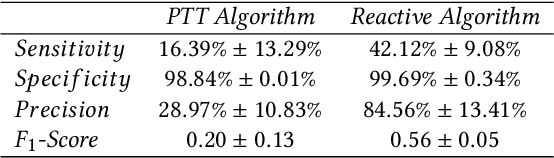
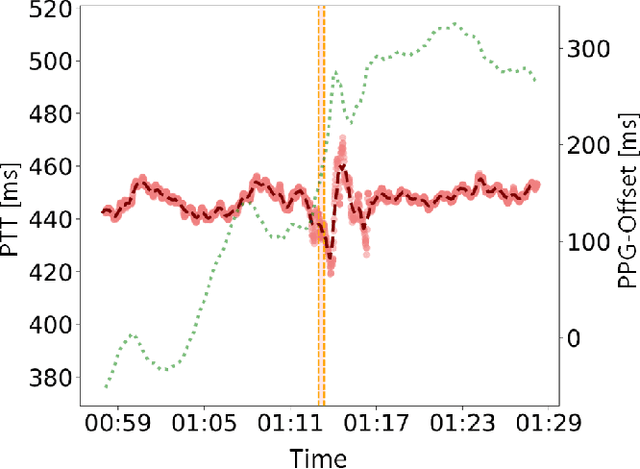
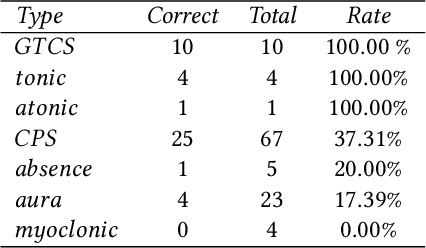
Documentation of epileptic seizures plays an essential role in planning medical therapy. Solutions for automated epileptic seizure detection can help improve the current problem of incomplete and erroneous manual documentation of epileptic seizures. In recent years, a number of wearable sensors have been tested for this purpose. However, detecting seizures with subtle symptoms remains difficult and current solutions tend to have a high false alarm rate. Seizures can also affect the patient's arterial blood pressure, which has not yet been studied for detection with sensors. The pulse transit time (PTT) provides a noninvasive estimate of arterial blood pressure. It can be obtained by using to two sensors, which are measuring the time differences between arrivals of the pulse waves. Due to separated time chips a clock drift emerges, which is strongly influencing the PTT. In this work, we present an algorithm which responds to alterations in the PTT, considering the clock drift and enabling the noninvasive monitoring of blood pressure alterations using separated sensors. Furthermore we investigated whether seizures can be detected using the PTT. Our results indicate that using the algorithm, it is possible to detect seizures with a Random Forest. Using the PTT along with other signals in a multimodal approach, the detection of seizures with subtle symptoms could thereby be improved.
Dynamic Time Warping Clustering to Discover Socio-Economic Characteristics in Smart Water Meter Data
Dec 27, 2021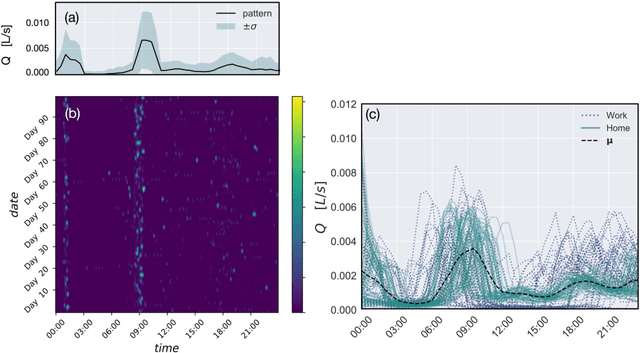
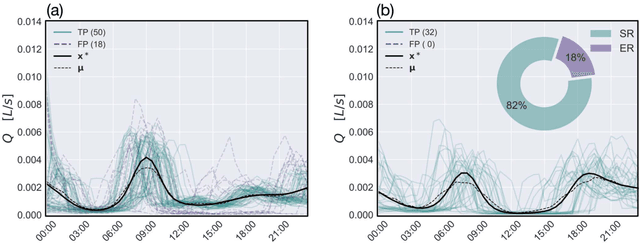
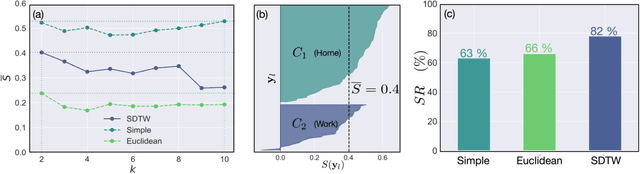
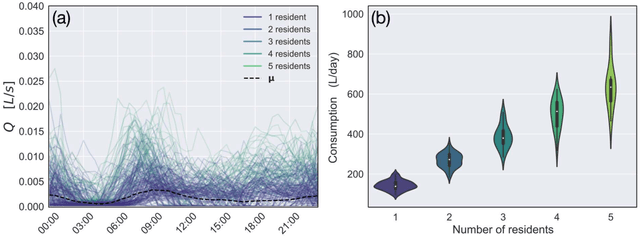
Socio-economic characteristics are influencing the temporal and spatial variability of water demand - the biggest source of uncertainties within water distribution system modeling. Improving our knowledge on these influences can be utilized to decrease demand uncertainties. This paper aims to link smart water meter data to socio-economic user characteristics by applying a novel clustering algorithm that uses a dynamic time warping metric on daily demand patterns. The approach is tested on simulated and measured single family home datasets. We show that the novel algorithm performs better compared to commonly used clustering methods, both, in finding the right number of clusters as well as assigning patterns correctly. Additionally, the methodology can be used to identify outliers within clusters of demand patterns. Furthermore, this study investigates which socio-economic characteristics (e.g. employment status, number of residents) are prevalent within single clusters and, consequently, can be linked to the shape of the cluster's barycenters. In future, the proposed methods in combination with stochastic demand models can be used to fill data-gaps in hydraulic models.
* 16 pages, 8 figures
Entropy Induced Pruning Framework for Convolutional Neural Networks
Aug 13, 2022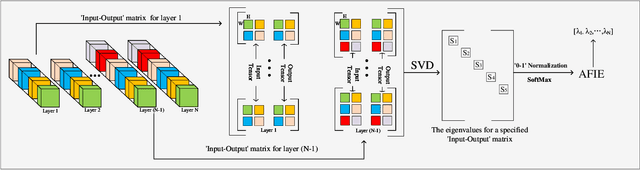
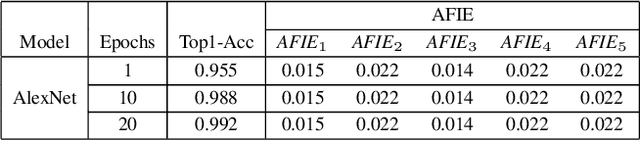
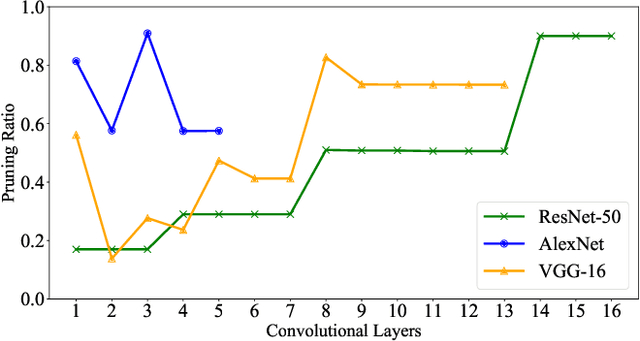

Structured pruning techniques have achieved great compression performance on convolutional neural networks for image classification task. However, the majority of existing methods are weight-oriented, and their pruning results may be unsatisfactory when the original model is trained poorly. That is, a fully-trained model is required to provide useful weight information. This may be time-consuming, and the pruning results are sensitive to the updating process of model parameters. In this paper, we propose a metric named Average Filter Information Entropy (AFIE) to measure the importance of each filter. It is calculated by three major steps, i.e., low-rank decomposition of the "input-output" matrix of each convolutional layer, normalization of the obtained eigenvalues, and calculation of filter importance based on information entropy. By leveraging the proposed AFIE, the proposed framework is able to yield a stable importance evaluation of each filter no matter whether the original model is trained fully. We implement our AFIE based on AlexNet, VGG-16, and ResNet-50, and test them on MNIST, CIFAR-10, and ImageNet, respectively. The experimental results are encouraging. We surprisingly observe that for our methods, even when the original model is only trained with one epoch, the importance evaluation of each filter keeps identical to the results when the model is fully-trained. This indicates that the proposed pruning strategy can perform effectively at the beginning stage of the training process for the original model.
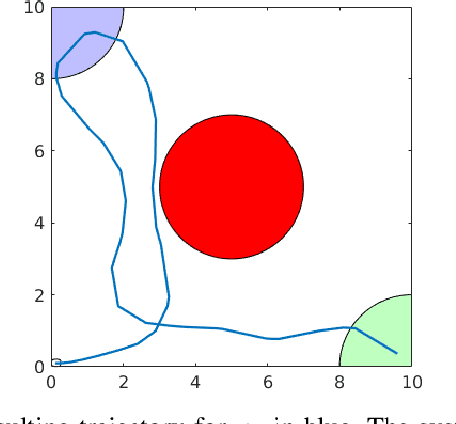
Collaborative Navigation and Manipulation of a Cable-towed Load by Multiple Quadrupedal Robots
Jun 29, 2022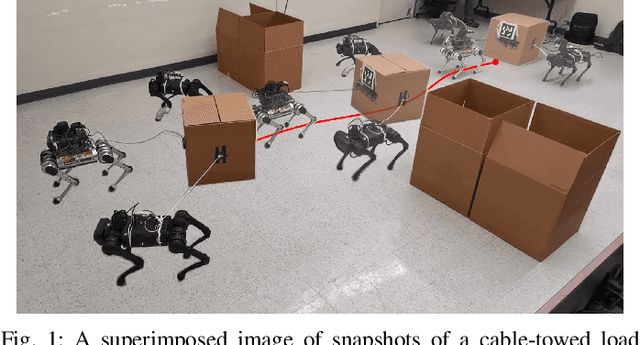
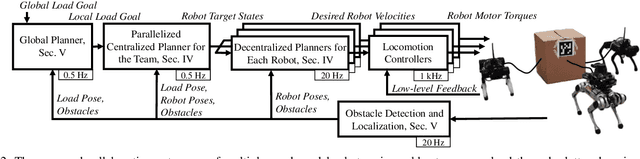
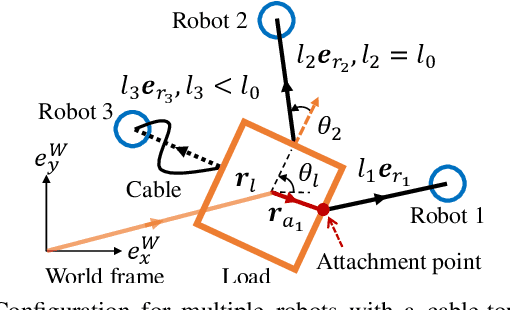
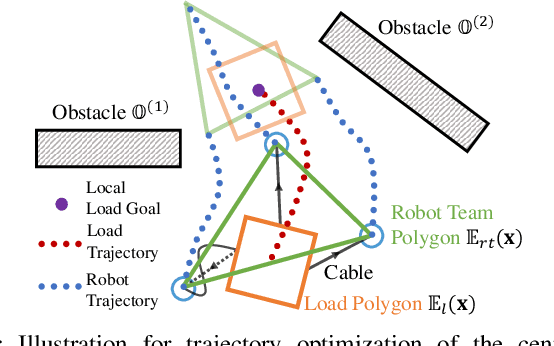
This paper tackles the problem of robots collaboratively towing a load with cables to a specified goal location while avoiding collisions in real time. The introduction of cables (as opposed to rigid links) enables the robotic team to travel through narrow spaces by changing its intrinsic dimensions through slack/taut switches of the cable. However, this is a challenging problem because of the hybrid mode switches and the dynamical coupling among multiple robots and the load. Previous attempts at addressing such a problem were performed offline and do not consider avoiding obstacles online. In this paper, we introduce a cascaded planning scheme with a parallelized centralized trajectory optimization that deals with hybrid mode switches. We additionally develop a set of decentralized planners per robot, which enables our approach to solve the problem of collaborative load manipulation online. We develop and demonstrate one of the first collaborative autonomy framework that is able to move a cable-towed load, which is too heavy to move by a single robot, through narrow spaces with real-time feedback and reactive planning in experiments.
COBRA: Cpu-Only aBdominal oRgan segmentAtion
Jul 21, 2022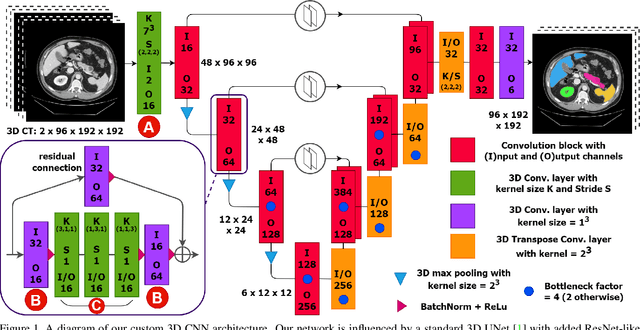
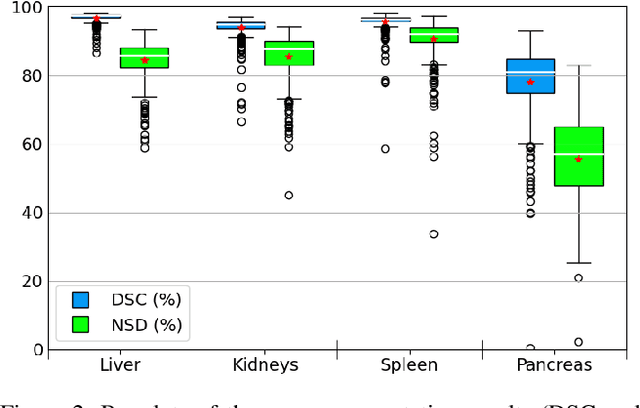
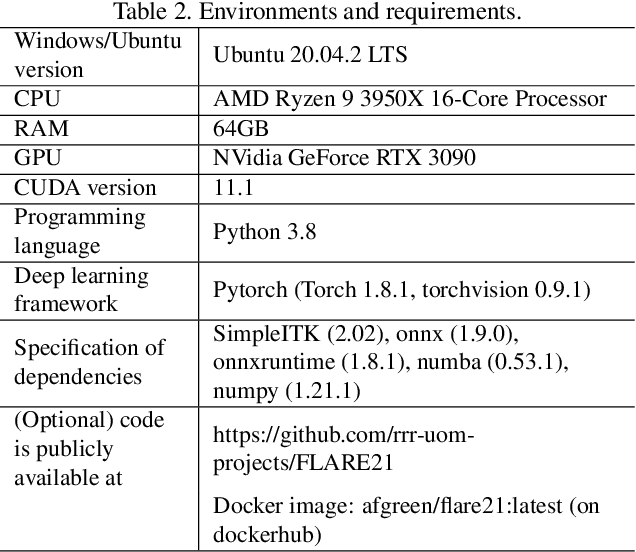
Abdominal organ segmentation is a difficult and time-consuming task. To reduce the burden on clinical experts, fully-automated methods are highly desirable. Current approaches are dominated by Convolutional Neural Networks (CNNs) however the computational requirements and the need for large data sets limit their application in practice. By implementing a small and efficient custom 3D CNN, compiling the trained model and optimizing the computational graph: our approach produces high accuracy segmentations (Dice Similarity Coefficient (%): Liver: 97.3$\pm$1.3, Kidneys: 94.8$\pm$3.6, Spleen: 96.4$\pm$3.0, Pancreas: 80.9$\pm$10.1) at a rate of 1.6 seconds per image. Crucially, we are able to perform segmentation inference solely on CPU (no GPU required), thereby facilitating easy and widespread deployment of the model without specialist hardware.