 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
A Hierarchical Game-Theoretic Decision-Making for Cooperative Multi-Agent Systems Under the Presence of Adversarial Agents
Mar 28, 2023
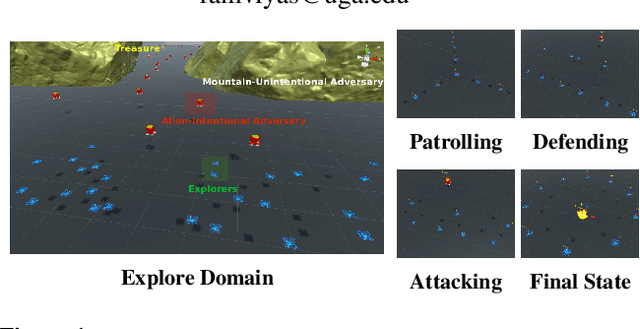
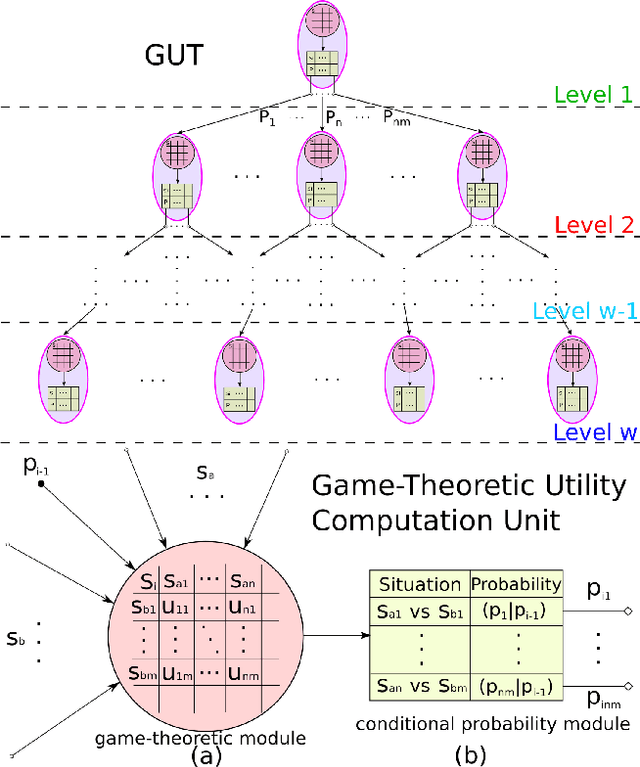
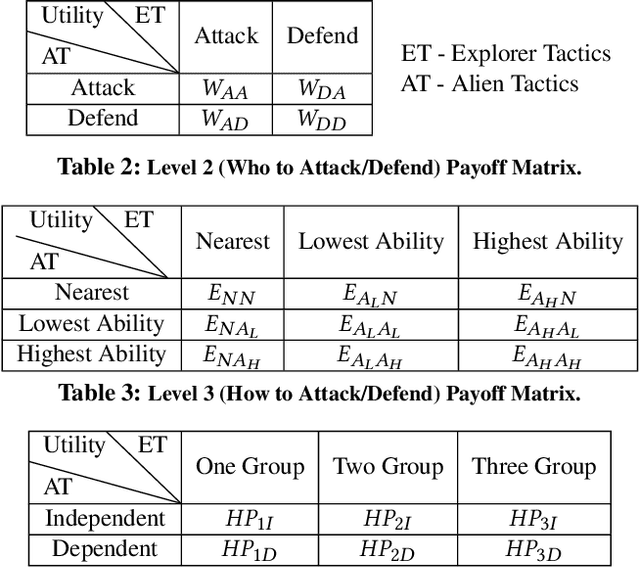
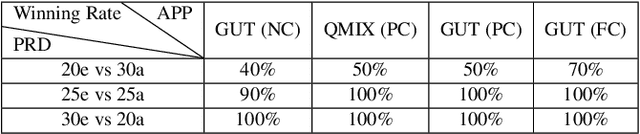
Underlying relationships among Multi-Agent Systems (MAS) in hazardous scenarios can be represented as Game-theoretic models. This paper proposes a new hierarchical network-based model called Game-theoretic Utility Tree (GUT), which decomposes high-level strategies into executable low-level actions for cooperative MAS decisions. It combines with a new payoff measure based on agent needs for real-time strategy games. We present an Explore game domain, where we measure the performance of MAS achieving tasks from the perspective of balancing the success probability and system costs. We evaluate the GUT approach against state-of-the-art methods that greedily rely on rewards of the composite actions. Conclusive results on extensive numerical simulations indicate that GUT can organize more complex relationships among MAS cooperation, helping the group achieve challenging tasks with lower costs and higher winning rates. Furthermore, we demonstrated the applicability of the GUT using the simulator-hardware testbed - Robotarium. The performances verified the effectiveness of the GUT in the real robot application and validated that the GUT could effectively organize MAS cooperation strategies, helping the group with fewer advantages achieve higher performance.
Modeling and Joint Optimization of Security, Latency, and Computational Cost in Blockchain-based Healthcare Systems
Mar 28, 2023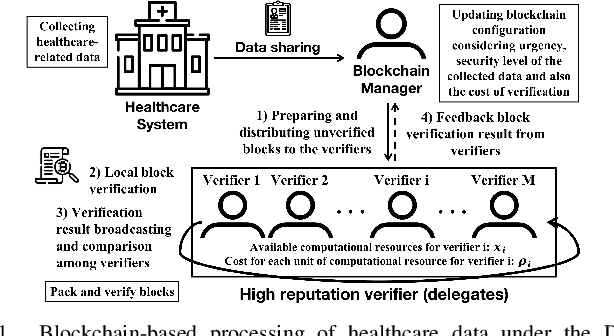
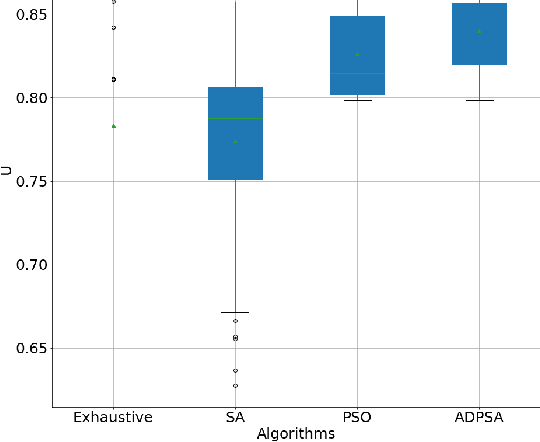
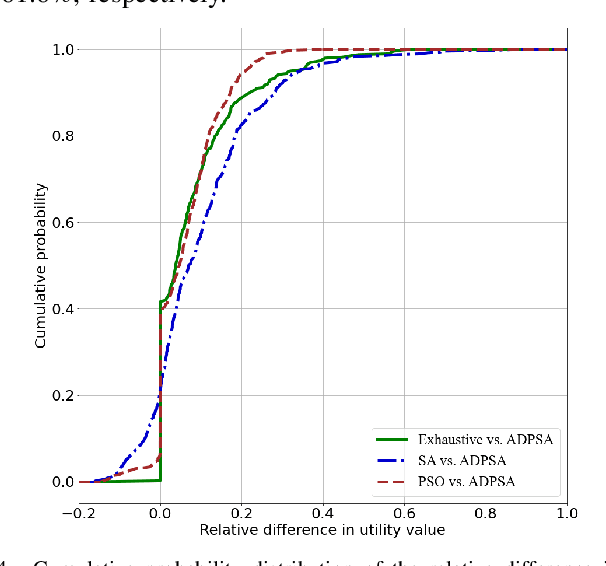
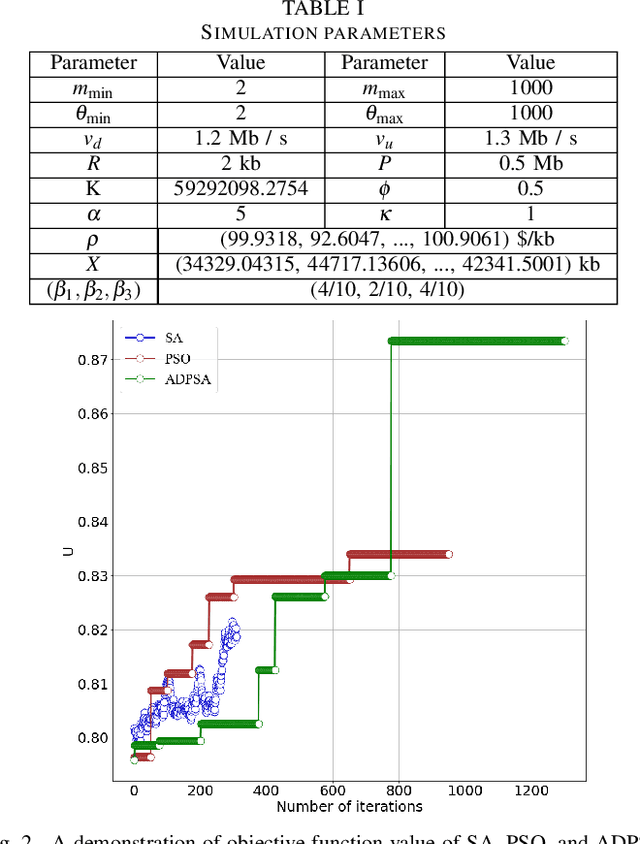
In the era of the Internet of Things (IoT), blockchain is a promising technology for improving the efficiency of healthcare systems, as it enables secure storage, management, and sharing of real-time health data collected by the IoT devices. As the implementations of blockchain-based healthcare systems usually involve multiple conflicting metrics, it is essential to balance them according to the requirements of specific scenarios. In this paper, we formulate a joint optimization model with three metrics, namely latency, security, and computational cost, that are particularly important for IoT-enabled healthcare. However, it is computationally intractable to identify the exact optimal solution of this problem for practical sized systems. Thus, we propose an algorithm called the Adaptive Discrete Particle Swarm Algorithm (ADPSA) to obtain near-optimal solutions in a low-complexity manner. With its roots in the classical Particle Swarm Optimization (PSO) algorithm, our proposed ADPSA can effectively manage the numerous binary and integer variables in the formulation. We demonstrate by extensive numerical experiments that the ADPSA consistently outperforms existing benchmark approaches, including the original PSO, exhaustive search and Simulated Annealing, in a wide range of scenarios.
Non-convex approaches for low-rank tensor completion under tubal sampling
Mar 17, 2023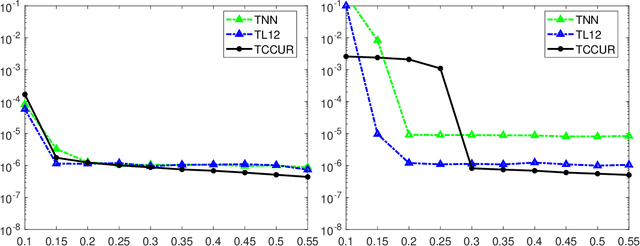
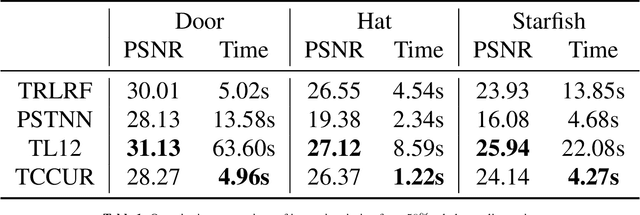
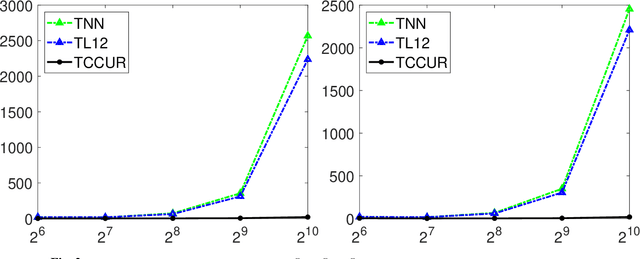
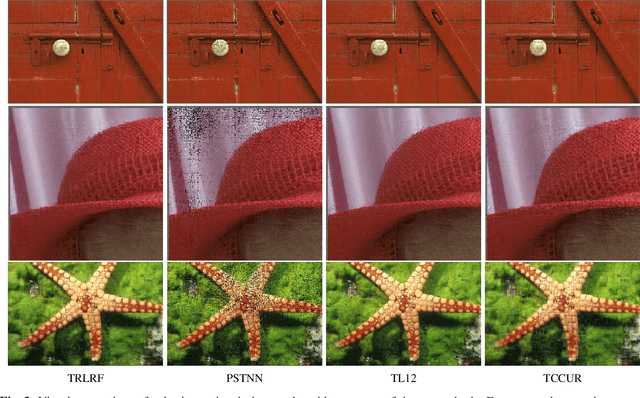
Tensor completion is an important problem in modern data analysis. In this work, we investigate a specific sampling strategy, referred to as tubal sampling. We propose two novel non-convex tensor completion frameworks that are easy to implement, named tensor $L_1$-$L_2$ (TL12) and tensor completion via CUR (TCCUR). We test the efficiency of both methods on synthetic data and a color image inpainting problem. Empirical results reveal a trade-off between the accuracy and time efficiency of these two methods in a low sampling ratio. Each of them outperforms some classical completion methods in at least one aspect.
Cross-Attention is all you need: Real-Time Streaming Transformers for Personalised Speech Enhancement
Nov 08, 2022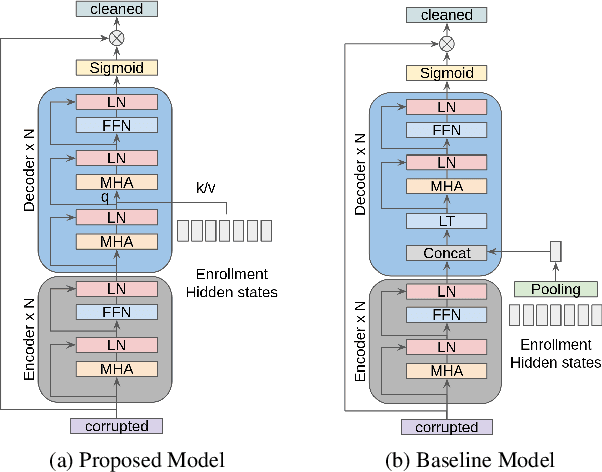
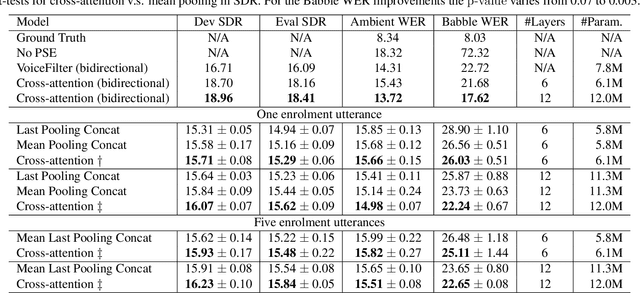
Personalised speech enhancement (PSE), which extracts only the speech of a target user and removes everything else from a recorded audio clip, can potentially improve users' experiences of audio AI modules deployed in the wild. To support a large variety of downstream audio tasks, such as real-time ASR and audio-call enhancement, a PSE solution should operate in a streaming mode, i.e., input audio cleaning should happen in real-time with a small latency and real-time factor. Personalisation is typically achieved by extracting a target speaker's voice profile from an enrolment audio, in the form of a static embedding vector, and then using it to condition the output of a PSE model. However, a fixed target speaker embedding may not be optimal under all conditions. In this work, we present a streaming Transformer-based PSE model and propose a novel cross-attention approach that gives adaptive target speaker representations. We present extensive experiments and show that our proposed cross-attention approach outperforms competitive baselines consistently, even when our model is only approximately half the size.
Minimally Constrained Multi-Robot Coordination with Line-of-sight Connectivity Maintenance
Mar 07, 2023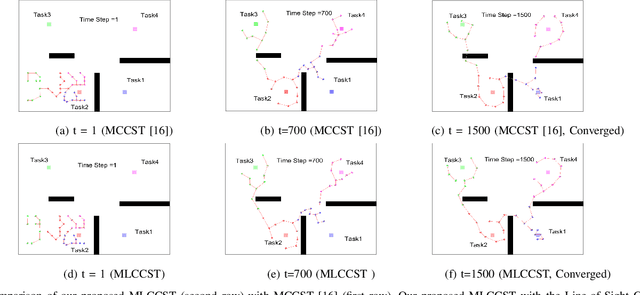
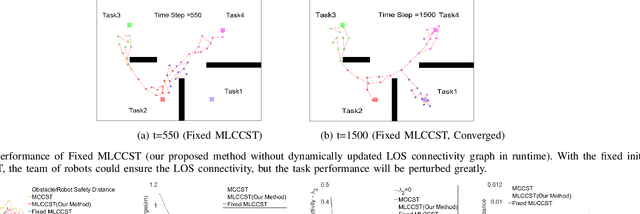
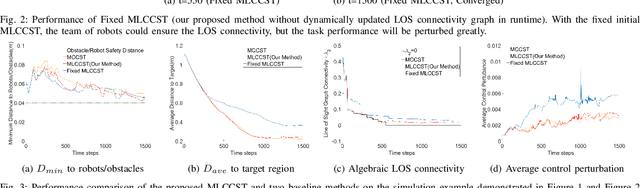
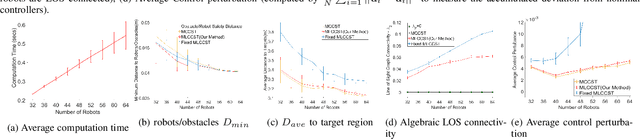
In this paper, we consider a team of mobile robots executing simultaneously multiple behaviors by different subgroups, while maintaining global and subgroup line-of-sight (LOS) network connectivity that minimally constrains the original multi-robot behaviors. The LOS connectivity between pairwise robots is preserved when two robots stay within the limited communication range and their LOS remains occlusion-free from static obstacles while moving. By using control barrier functions (CBF) and minimum volume enclosing ellipsoids (MVEE), we first introduce the LOS connectivity barrier certificate (LOS-CBC) to characterize the state-dependent admissible control space for pairwise robots, from which their resulting motion will keep the two robots LOS connected over time. We then propose the Minimum Line-of-Sight Connectivity Constraint Spanning Tree (MLCCST) as a step-wise bilevel optimization framework to jointly optimize (a) the minimum set of LOS edges to actively maintain, and (b) the control revision with respect to a nominal multi-robot controller due to LOS connectivity maintenance. As proved in the theoretical analysis, this allows the robots to improvise the optimal composition of LOS-CBC control constraints that are least constraining around the nominal controllers, and at the same time enforce the global and subgroup LOS connectivity through the resulting preserved set of pairwise LOS edges. The framework thus leads to robots staying as close to their nominal behaviors, while exhibiting dynamically changing LOS-connected network topology that provides the greatest flexibility for the existing multi-robot tasks in real time. We demonstrate the effectiveness of our approach through simulations with up to 64 robots.
Improving Data Transfer Efficiency for AIs in the DareFightingICE using gRPC
Mar 11, 2023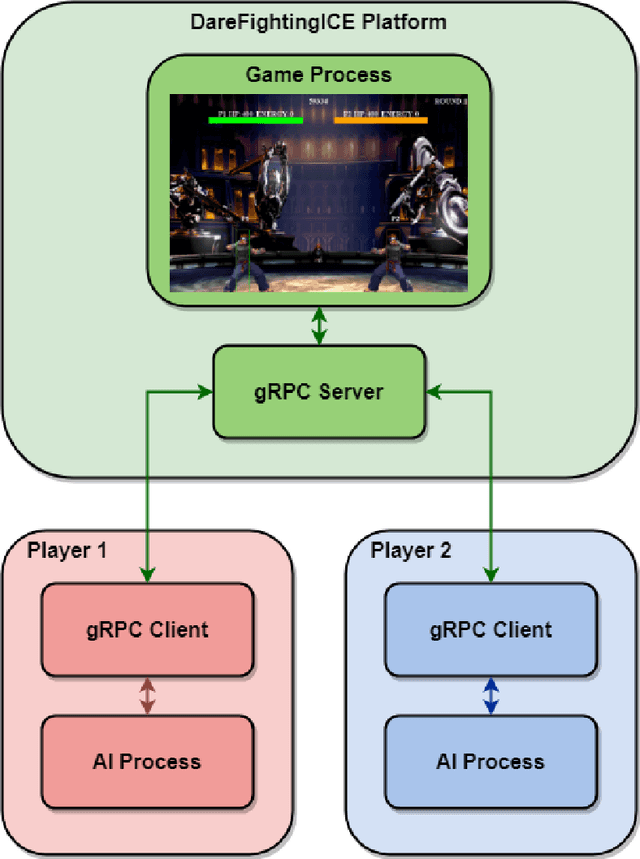
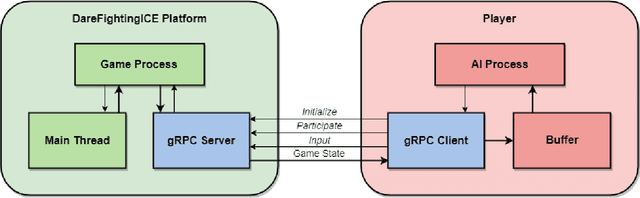
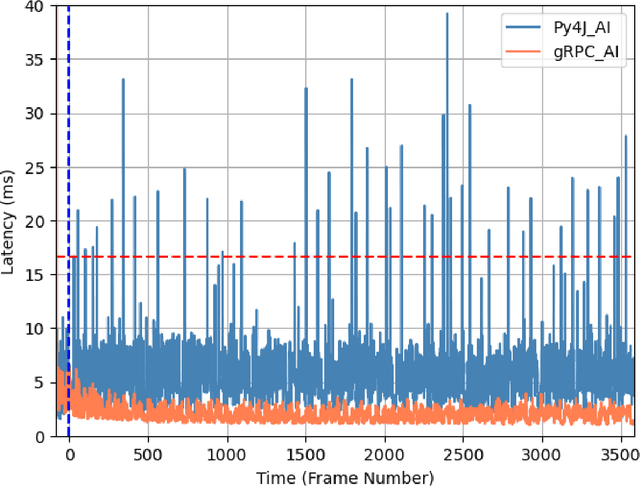
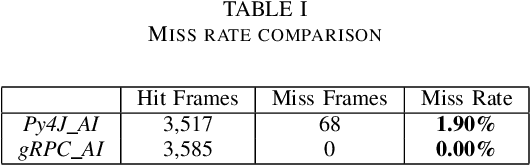
This paper presents a new communication interface for the DareFightingICE platform, a Java-based fighting game focused on implementing AI for controlling a non-player character. The interface uses an open-source remote procedure call, gRPC to improve the efficiency of data transfer between the game and the AI, reducing the time spent on receiving information from the game server. This is important because the main challenge of implementing AI in a fighting game is the need for the AI to select an action to perform within a short response time. The DareFightingICE platform has been integrated with Py4J, allowing developers to create AIs using Python. However, Py4J is less efficient at handling large amounts of data, resulting in excessive latency. In contrast, gRPC is well-suited for transmitting large amounts of data. To evaluate the effectiveness of the new communication interface, we conducted an experiment comparing the latency of gRPC and Py4J, using a rule-based AI that sends a kick command regardless of the information received from the game server. The experiment results showed not only a 65\% reduction in latency but also improved stability and eliminated missed frames compared to the current interface.
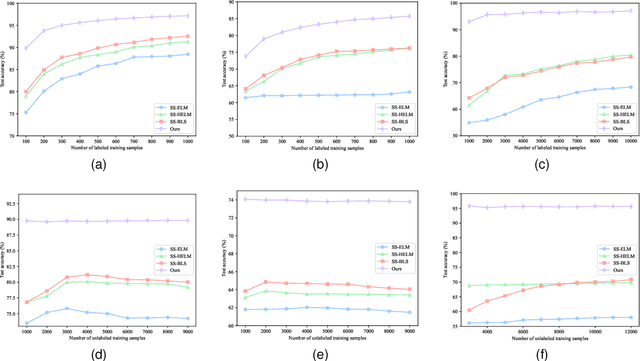
AI-Enhanced Intensive Care Unit: Revolutionizing Patient Care with Pervasive Sensing
Mar 11, 2023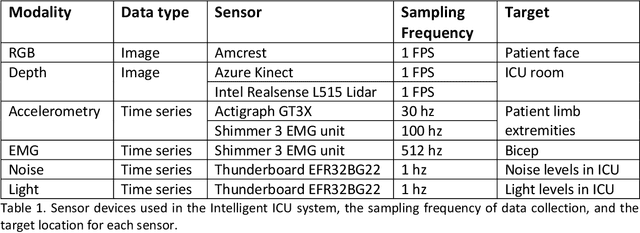
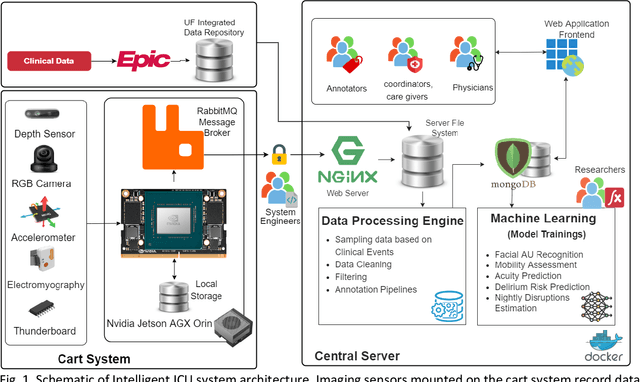
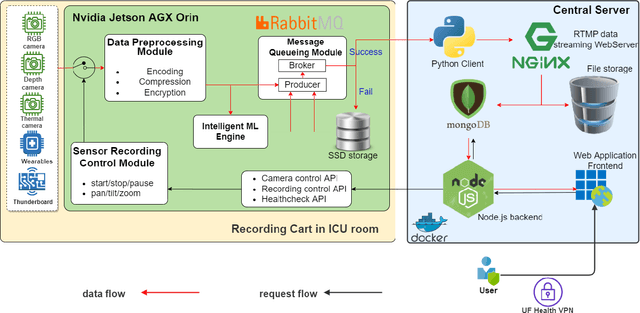
The intensive care unit (ICU) is a specialized hospital space where critically ill patients receive intensive care and monitoring. Comprehensive monitoring is imperative in assessing patients conditions, in particular acuity, and ultimately the quality of care. However, the extent of patient monitoring in the ICU is limited due to time constraints and the workload on healthcare providers. Currently, visual assessments for acuity, including fine details such as facial expressions, posture, and mobility, are sporadically captured, or not captured at all. These manual observations are subjective to the individual, prone to documentation errors, and overburden care providers with the additional workload. Artificial Intelligence (AI) enabled systems has the potential to augment the patient visual monitoring and assessment due to their exceptional learning capabilities. Such systems require robust annotated data to train. To this end, we have developed pervasive sensing and data processing system which collects data from multiple modalities depth images, color RGB images, accelerometry, electromyography, sound pressure, and light levels in ICU for developing intelligent monitoring systems for continuous and granular acuity, delirium risk, pain, and mobility assessment. This paper presents the Intelligent Intensive Care Unit (I2CU) system architecture we developed for real-time patient monitoring and visual assessment.
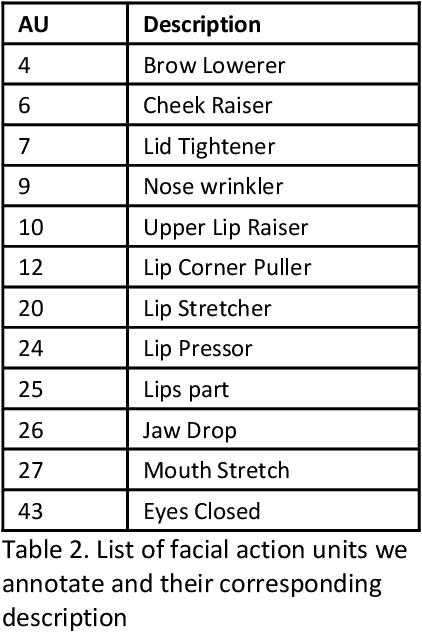
ConvBLS: An Effective and Efficient Incremental Convolutional Broad Learning System for Image Classification
Apr 01, 2023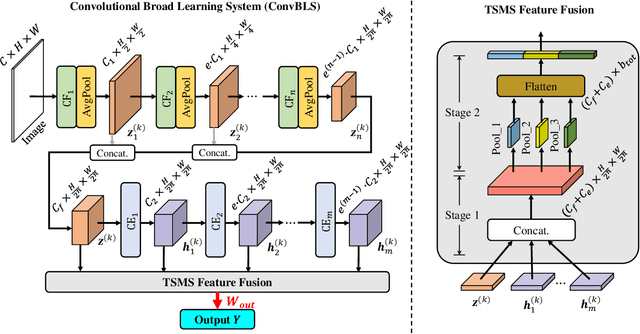
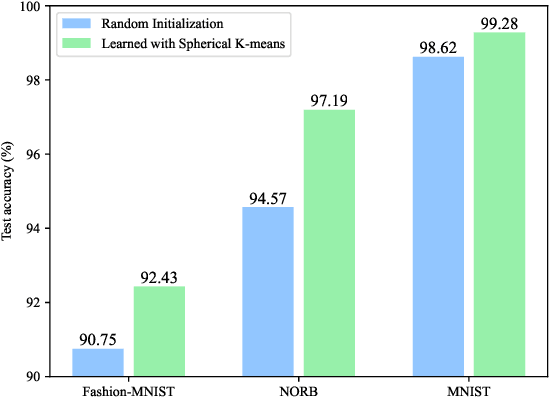
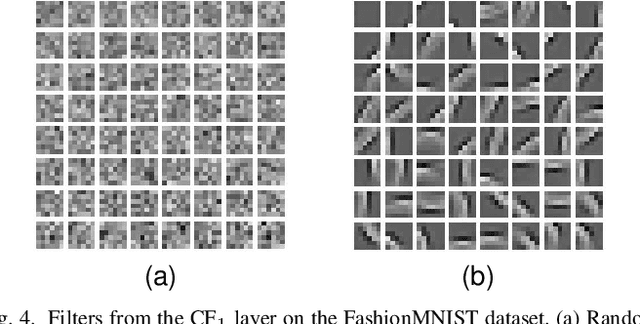
Deep learning generally suffers from enormous computational resources and time-consuming training processes. Broad Learning System (BLS) and its convolutional variants have been proposed to mitigate these issues and have achieved superb performance in image classification. However, the existing convolutional-based broad learning system (C-BLS) either lacks an efficient training method and incremental learning capability or suffers from poor performance. To this end, we propose a convolutional broad learning system (ConvBLS) based on the spherical K-means (SKM) algorithm and two-stage multi-scale (TSMS) feature fusion, which consists of the convolutional feature (CF) layer, convolutional enhancement (CE) layer, TSMS feature fusion layer, and output layer. First, unlike the current C-BLS, the simple yet efficient SKM algorithm is utilized to learn the weights of CF layers. Compared with random filters, the SKM algorithm makes the CF layer learn more comprehensive spatial features. Second, similar to the vanilla BLS, CE layers are established to expand the feature space. Third, the TSMS feature fusion layer is proposed to extract more effective multi-scale features through the integration of CF layers and CE layers. Thanks to the above design and the pseudo-inverse calculation of the output layer weights, our proposed ConvBLS method is unprecedentedly efficient and effective. Finally, the corresponding incremental learning algorithms are presented for rapid remodeling if the model deems to expand. Experiments and comparisons demonstrate the superiority of our method.
Graph-based Simultaneous Coverage and Exploration Planning for Fast Multi-robot Search
Mar 03, 2023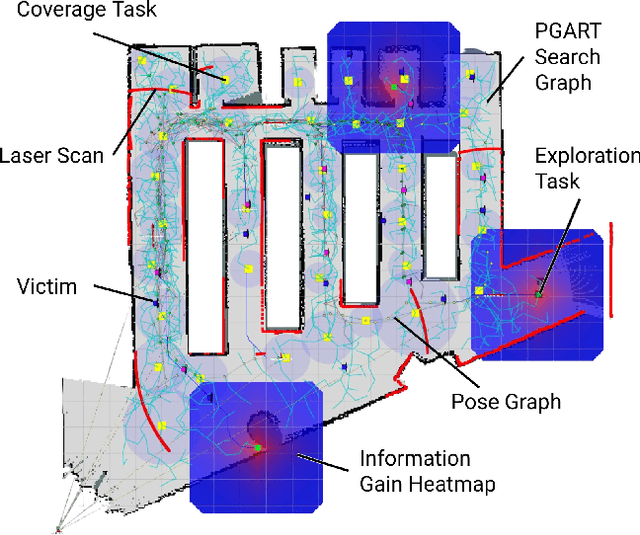
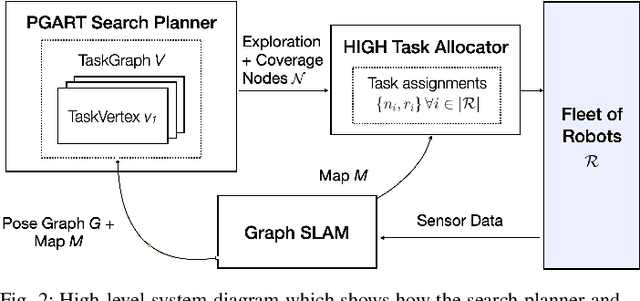
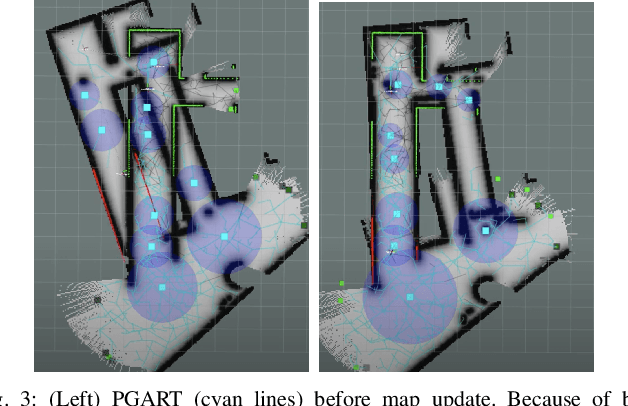
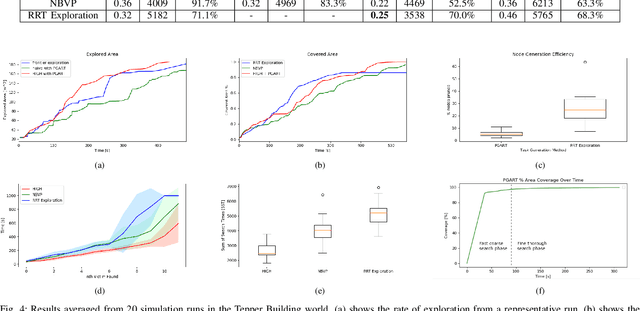
In large unknown environments, search operations can be much more time-efficient with the use of multi-robot fleets by parallelizing efforts. This means robots must efficiently perform collaborative mapping (exploration) while simultaneously searching an area for victims (coverage). Previous simultaneous mapping and planning techniques treat these problems as separate and do not take advantage of the possibility for a unified approach. We propose a novel exploration-coverage planner which bridges the mapping and search domains by growing sets of random trees rooted upon a pose graph produced through mapping to generate points of interest, or tasks. Furthermore, it is important for the robots to first prioritize high information tasks to locate the greatest number of victims in minimum time by balancing coverage and exploration, which current methods do not address. Towards this goal, we also present a new multi-robot task allocator that formulates a notion of a hierarchical information heuristic for time-critical collaborative search. Our results show that our algorithm produces 20% more coverage efficiency, defined as average covered area per second, compared to the existing state-of-the-art. Our algorithms and the rest of our multi-robot search stack is based in ROS and made open source
Lossless Microarray Image Compression by Hardware Array Compactor
Mar 18, 2023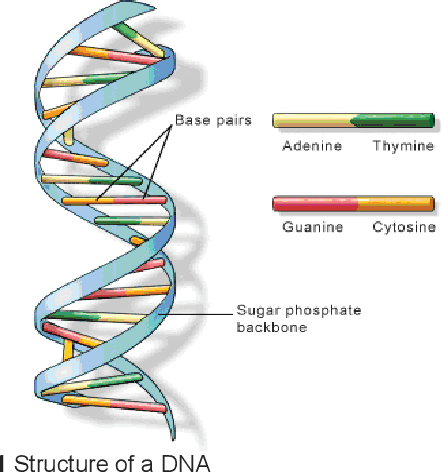
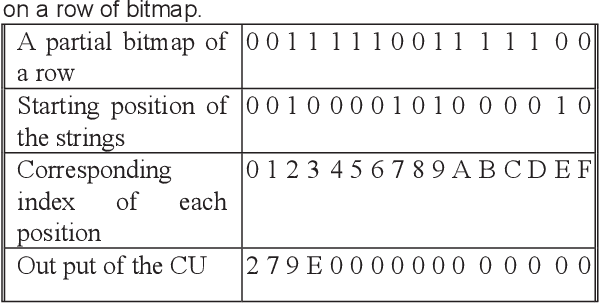

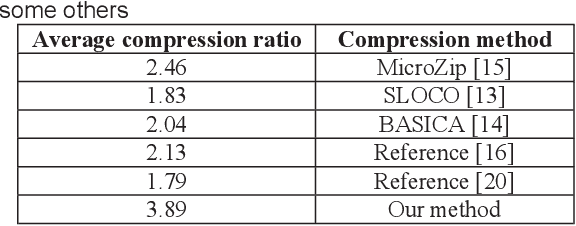
Microarray technology is a new and powerful tool for the concurrent monitoring of a large number of gene expressions. Each microarray experiment produces hundreds of images. Each digital image requires a large storage space. Hence, real-time processing of these images and transmission of them necessitates efficient and custom-made lossless compression schemes. In this paper, we offer a new architecture for the lossless compression of microarray images. In this architecture, we have used dedicated hardware for the separation of foreground pixels from background ones. By separating these pixels and using pipeline architecture, a higher lossless compression ratio has been achieved as compared to other existing methods.