 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Information": models, code, and papers
Modeling Object Dissimilarity for Deep Saliency Prediction
Apr 08, 2021
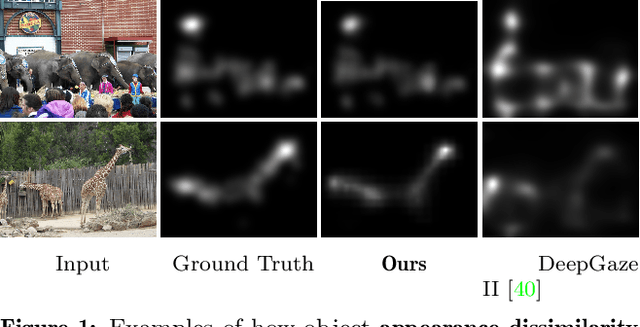
Saliency prediction has made great strides over the past two decades, with current techniques modeling low-level information, such as color, intensity and size contrasts, and high-level one, such as attention and gaze direction for entire objects. Despite this, these methods fail to account for the dissimilarity between objects, which humans naturally do. In this paper, we introduce a detection-guided saliency prediction network that explicitly models the differences between multiple objects, such as their appearance and size dissimilarities. Our approach is general, allowing us to fuse our object dissimilarities with features extracted by any deep saliency prediction network. As evidenced by our experiments, this consistently boosts the accuracy of the baseline networks, enabling us to outperform the state-of-the-art models on three saliency benchmarks, namely SALICON, MIT300 and CAT2000.
Semiring Primitives for Sparse Neighborhood Methods on the GPU
Apr 13, 2021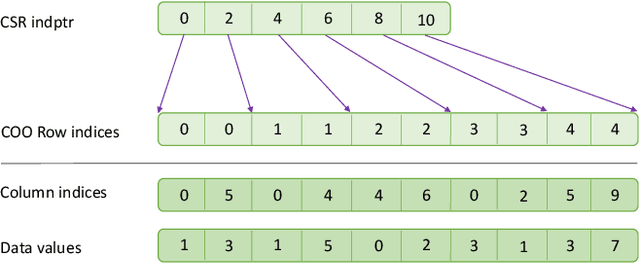
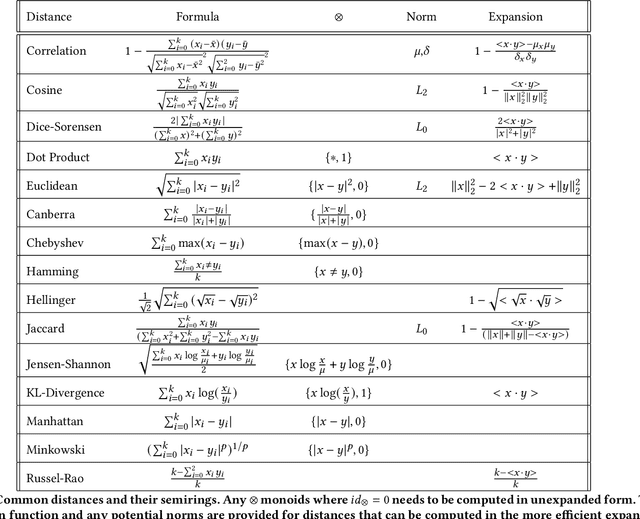
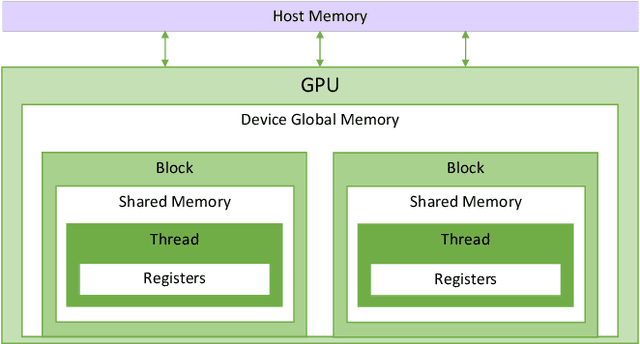
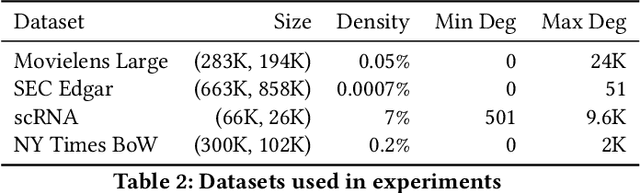
High-performance primitives for mathematical operations on sparse vectors must deal with the challenges of skewed degree distributions and limits on memory consumption that are typically not issues in dense operations. We demonstrate that a sparse semiring primitive can be flexible enough to support a wide range of critical distance measures while maintaining performance and memory efficiency on the GPU. We further show that this primitive is a foundational component for enabling many neighborhood-based information retrieval and machine learning algorithms to accept sparse input. To our knowledge, this is the first work aiming to unify the computation of several critical distance measures on the GPU under a single flexible design paradigm and we hope that it provides a good baseline for future research in this area. Our implementation is fully open source and publicly available at https://github.com/rapidsai/cuml.
Market Making with Decreasing Utility for Information
Jul 30, 2014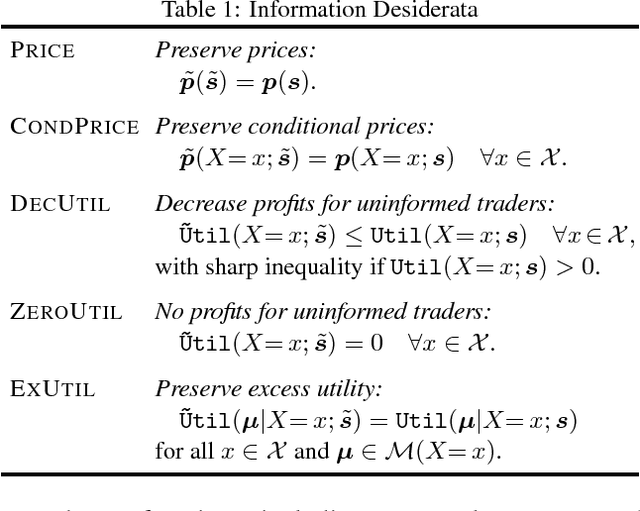
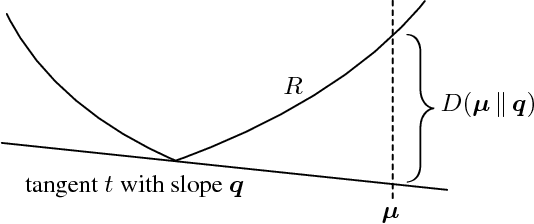
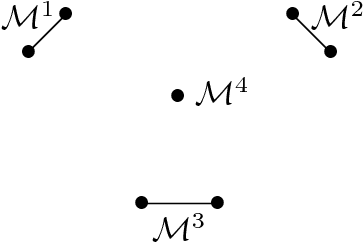
We study information elicitation in cost-function-based combinatorial prediction markets when the market maker's utility for information decreases over time. In the sudden revelation setting, it is known that some piece of information will be revealed to traders, and the market maker wishes to prevent guaranteed profits for trading on the sure information. In the gradual decrease setting, the market maker's utility for (partial) information decreases continuously over time. We design adaptive cost functions for both settings which: (1) preserve the information previously gathered in the market; (2) eliminate (or diminish) rewards to traders for the publicly revealed information; (3) leave the reward structure unaffected for other information; and (4) maintain the market maker's worst-case loss. Our constructions utilize mixed Bregman divergence, which matches our notion of utility for information.
Neural basis expansion analysis with exogenous variables: Forecasting electricity prices with NBEATSx
Apr 13, 2021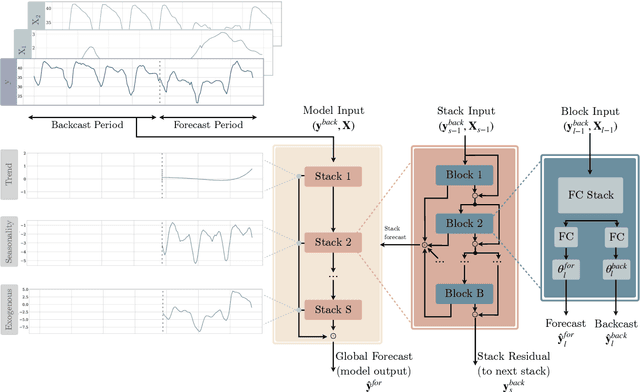

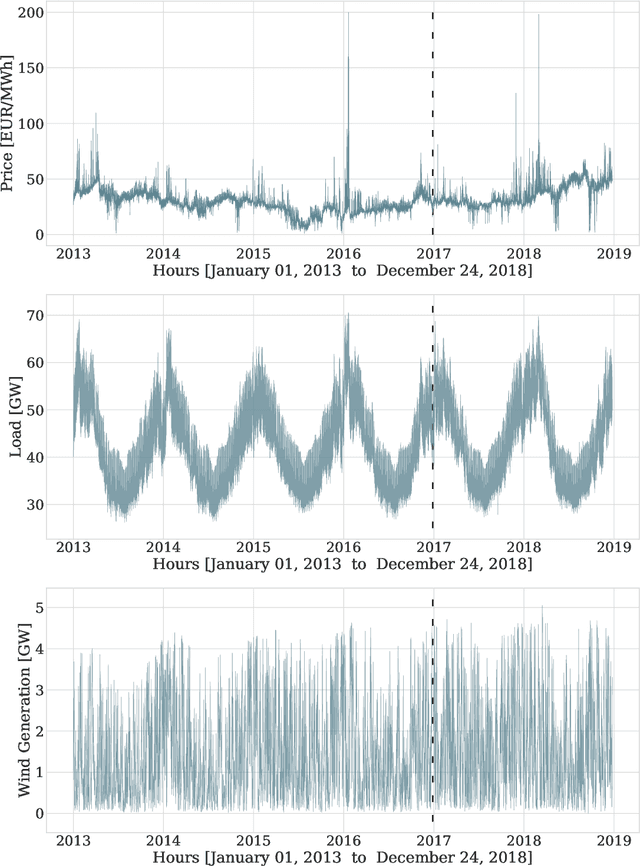
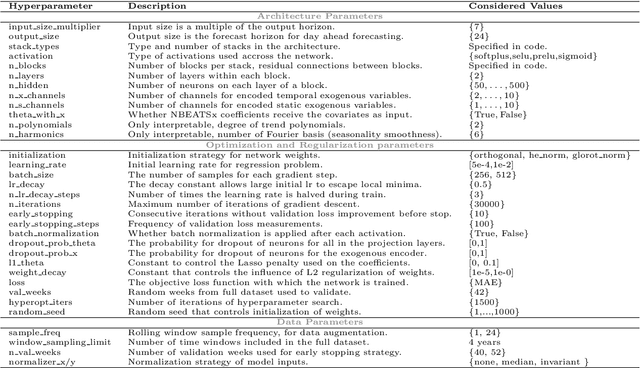
We extend the neural basis expansion analysis (NBEATS) to incorporate exogenous factors. The resulting method, called NBEATSx, improves on a well performing deep learning model, extending its capabilities by including exogenous variables and allowing it to integrate multiple sources of useful information. To showcase the utility of the NBEATSx model, we conduct a comprehensive study of its application to electricity price forecasting (EPF) tasks across a broad range of years and markets. We observe state-of-the-art performance, significantly improving the forecast accuracy by nearly 20% over the original NBEATS model, and by up to 5% over other well established statistical and machine learning methods specialized for these tasks. Additionally, the proposed neural network has an interpretable configuration that can structurally decompose time series, visualizing the relative impact of trend and seasonal components and revealing the modeled processes' interactions with exogenous factors.
A Tutorial on Deep Learning for Music Information Retrieval
May 03, 2018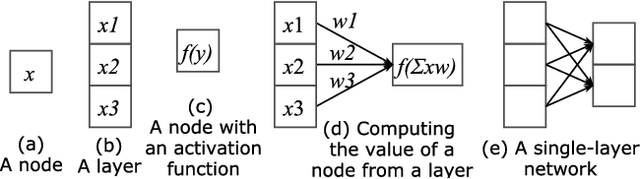
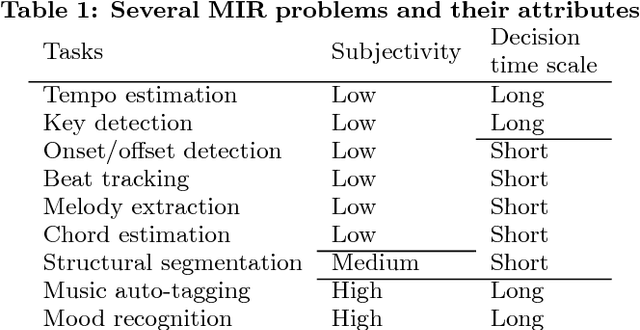
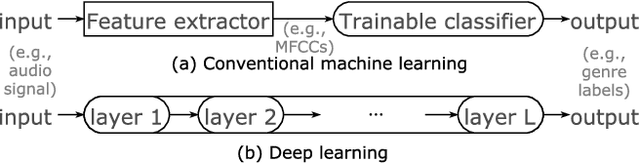
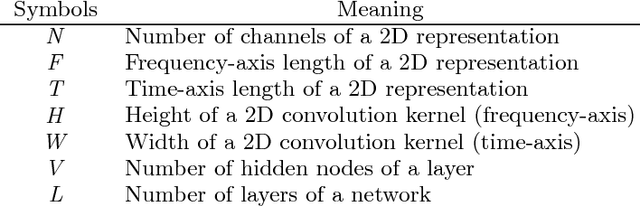
Following their success in Computer Vision and other areas, deep learning techniques have recently become widely adopted in Music Information Retrieval (MIR) research. However, the majority of works aim to adopt and assess methods that have been shown to be effective in other domains, while there is still a great need for more original research focusing on music primarily and utilising musical knowledge and insight. The goal of this paper is to boost the interest of beginners by providing a comprehensive tutorial and reducing the barriers to entry into deep learning for MIR. We lay out the basic principles and review prominent works in this hard to navigate the field. We then outline the network structures that have been successful in MIR problems and facilitate the selection of building blocks for the problems at hand. Finally, guidelines for new tasks and some advanced topics in deep learning are discussed to stimulate new research in this fascinating field.
Evaluating Actuators in a Purely Information-Theory Based Reward Model
Apr 10, 2018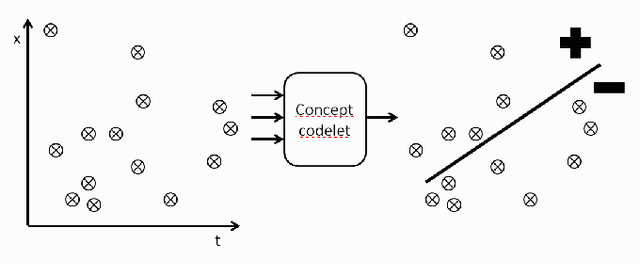
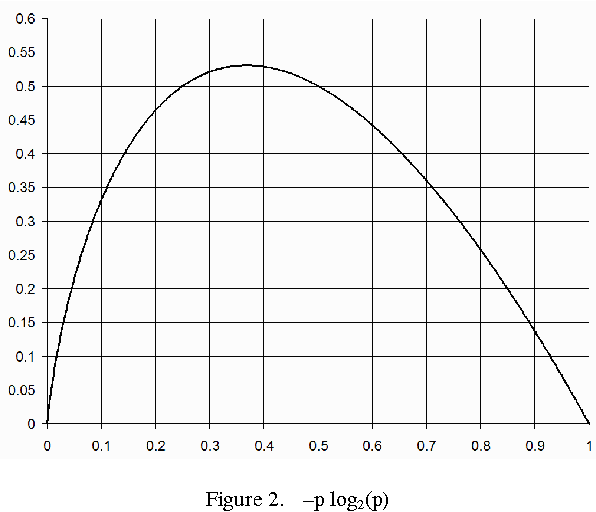
AGINAO builds its cognitive engine by applying self-programming techniques to create a hierarchy of interconnected codelets - the tiny pieces of code executed on a virtual machine. These basic processing units are evaluated for their applicability and fitness with a notion of reward calculated from self-information gain of binary partitioning of the codelet's input state-space. This approach, however, is useless for the evaluation of actuators. Instead, a model is proposed in which actuators are evaluated by measuring the impact that an activation of an effector, and consequently the feedback from the robot sensors, has on average reward received by the processing units.
* IEEE SSCI 2013, Singapore
Spatial Imagination With Semantic Cognition for Mobile Robots
Apr 08, 2021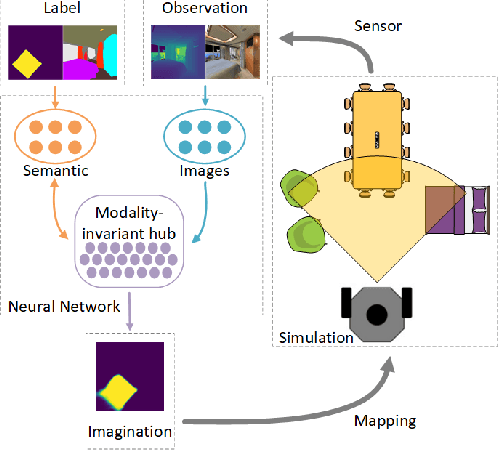
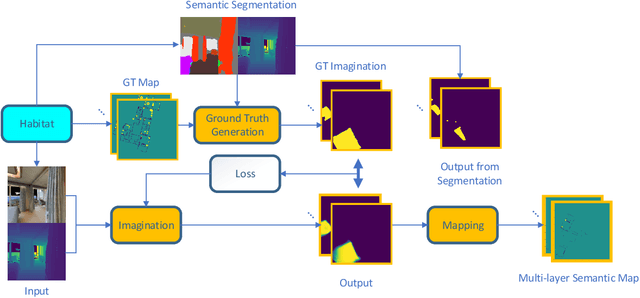
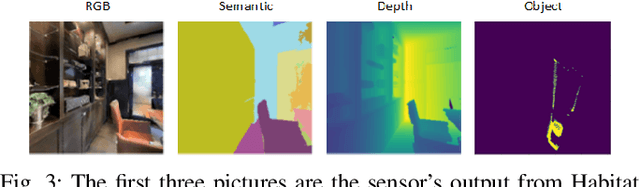
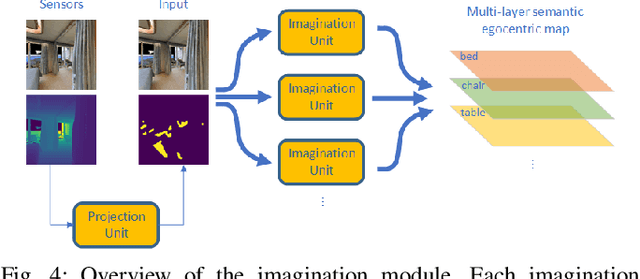
The imagination of the surrounding environment based on experience and semantic cognition has great potential to extend the limited observations and provide more information for mapping, collision avoidance, and path planning. This paper provides a training-based algorithm for mobile robots to perform spatial imagination based on semantic cognition and evaluates the proposed method for the mapping task. We utilize a photo-realistic simulation environment, Habitat, for training and evaluation. The trained model is composed of Resent-18 as encoder and Unet as the backbone. We demonstrate that the algorithm can perform imagination for unseen parts of the object universally, by recalling the images and experience and compare our approach with traditional semantic mapping methods. It is found that our approach will improve the efficiency and accuracy of semantic mapping.
CEAR: Cross-Entity Aware Reranker for Knowledge Base Completion
Apr 18, 2021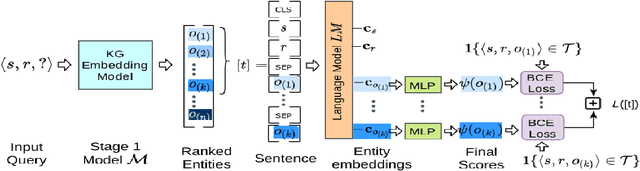
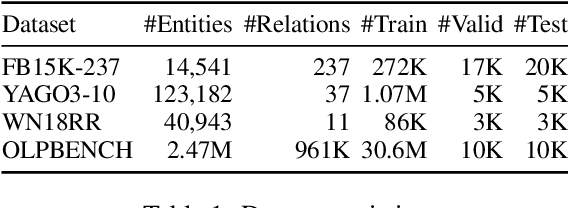
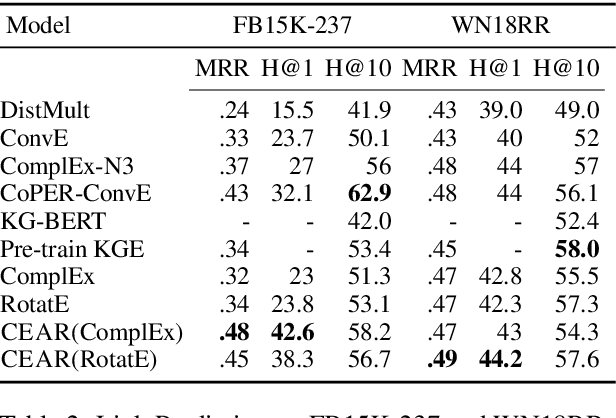
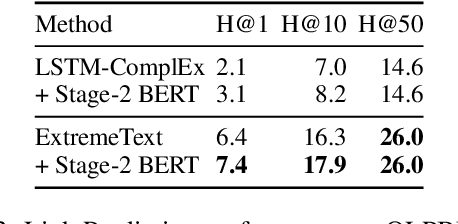
Pre-trained language models (LMs) like BERT have shown to store factual knowledge about the world. This knowledge can be used to augment the information present in Knowledge Bases, which tend to be incomplete. However, prior attempts at using BERT for task of Knowledge Base Completion (KBC) resulted in performance worse than embedding based techniques that rely only on the graph structure. In this work we develop a novel model, Cross-Entity Aware Reranker (CEAR), that uses BERT to re-rank the output of existing KBC models with cross-entity attention. Unlike prior work that scores each entity independently, CEAR uses BERT to score the entities together, which is effective for exploiting its factual knowledge. CEAR establishes a new state of the art performance with 42.6 HITS@1 in FB15k-237 (32.7% relative improvement) and 5.3 pt improvement in HITS@1 for Open Link Prediction.
Autonomous Flight in Unknown GNSS-denied Environments for Disaster Examination
Mar 22, 2021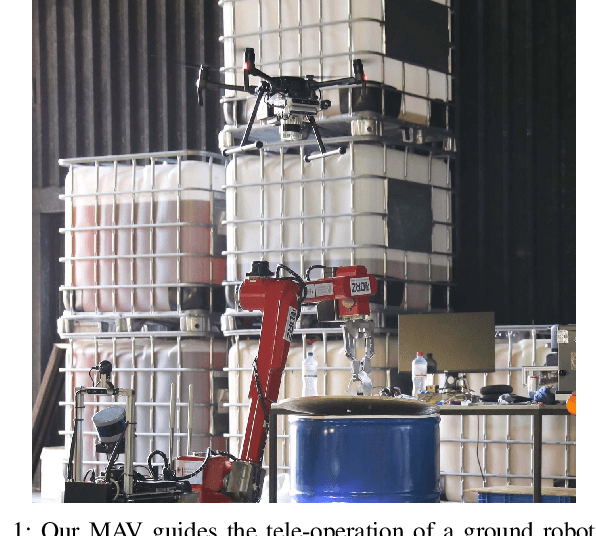
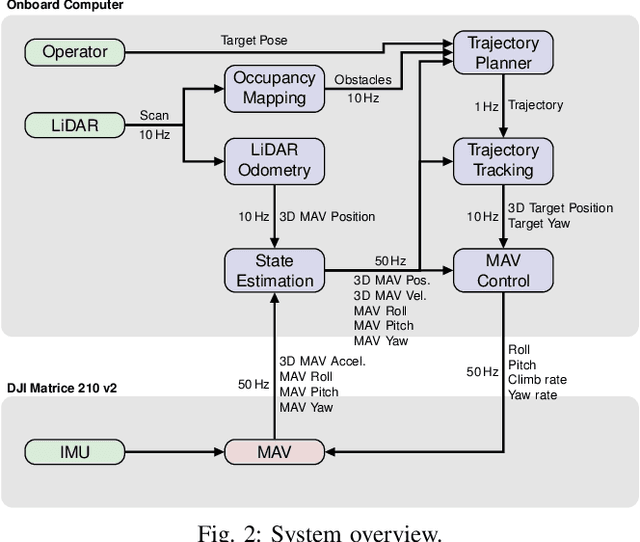
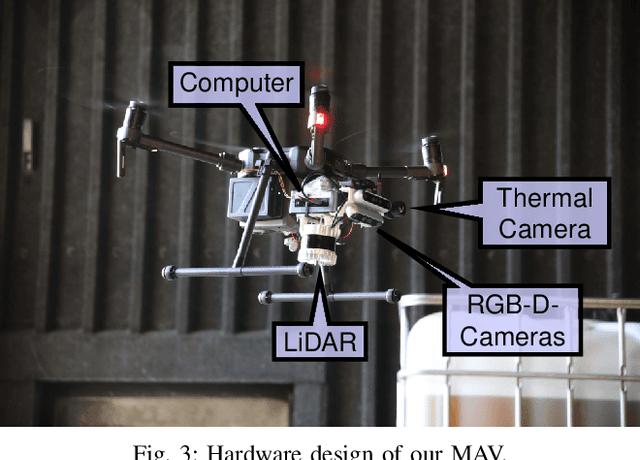

Micro aerial vehicles (MAVs) exhibit high potential for information extraction tasks in search and rescue scenarios. Manually controlling MAVs in such scenarios requires experienced pilots and is error-prone, especially in stressful situations of real emergencies. The conditions of disaster scenarios are also challenging for autonomous MAV systems. The environment is usually not known in advance and GNSS might not always be available. We present a system for autonomous MAV flights in unknown environments which does not rely on global positioning systems. The method is evaluated in multiple search and rescue scenarios and allows for safe autonomous flights, even when transitioning between indoor and outdoor areas.
A New Parameterized Family of Stochastic Particle Flow Filters
Mar 22, 2021
We derive a parameterized family of stochastic particle flows driven by a nonzero diffusion process for nonlinear filtering, Bayesian inference, or target tracking. This new family of stochastic flows takes the form of a linear combination of prior knowledge and measurement likelihood information. It is shown that several particle flows existing in the literature are special cases of this family. We prove that the particle flows are unbiased under the assumption of linear measurement and Gaussian distributions, and examine the consistency of estimates constructed from the stochastic flows. We further establish several finite time stability concepts for this new family of stochastic particle flows.