 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHabitatDyn Dataset: Dynamic Object Detection to Kinematics Estimation
Apr 21, 2023The advancement of computer vision and machine learning has made datasets a crucial element for further research and applications. However, the creation and development of robots with advanced recognition capabilities are hindered by the lack of appropriate datasets. Existing image or video processing datasets are unable to accurately depict observations from a moving robot, and they do not contain the kinematics information necessary for robotic tasks. Synthetic data, on the other hand, are cost-effective to create and offer greater flexibility for adapting to various applications. Hence, they are widely utilized in both research and industry. In this paper, we propose the dataset HabitatDyn, which contains both synthetic RGB videos, semantic labels, and depth information, as well as kinetics information. HabitatDyn was created from the perspective of a mobile robot with a moving camera, and contains 30 scenes featuring six different types of moving objects with varying velocities. To demonstrate the usability of our dataset, two existing algorithms are used for evaluation and an approach to estimate the distance between the object and camera is implemented based on these segmentation methods and evaluated through the dataset. With the availability of this dataset, we aspire to foster further advancements in the field of mobile robotics, leading to more capable and intelligent robots that can navigate and interact with their environments more effectively. The code is publicly available at https://github.com/ignc-research/HabitatDyn.
Imagination-augmented Navigation Based on 2D Laser Sensor Observations
Jun 12, 2022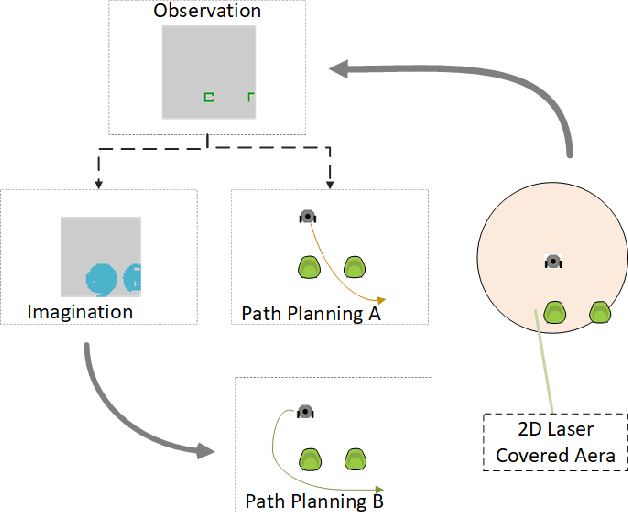
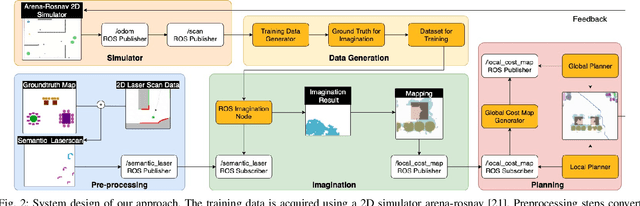
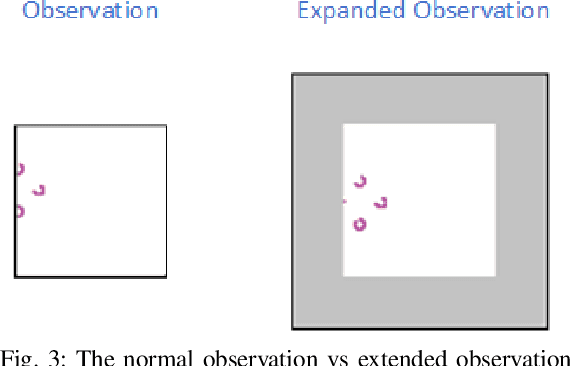
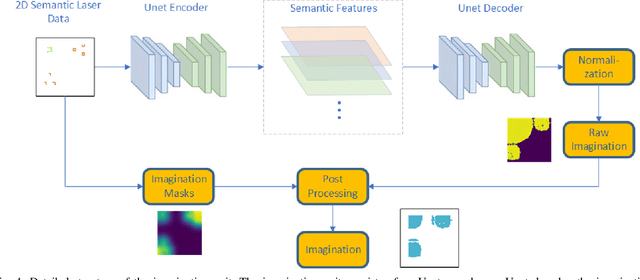
Autonomous navigation of mobile robots is an essential task for various industries. Sensor data is crucial to ensure safe and reliable navigation. However, sensor observations are often limited by different factors. Imagination can assist to enhance the view and aid navigation in dangerous or unknown situations where only limited sensor observation is available. In this paper, we propose an imagination-enhanced navigation based on 2D semantic laser scan data. The system contains an imagination module, which can predict the entire occupied area of the object. The imagination module is trained in a supervised manner using a collected training dataset from a 2D simulator. Four different imagination models are trained, and the imagination results are evaluated. Subsequently, the imagination results are integrated into the local and global cost map to benefit the navigation procedure. The approach is validated on three different test maps, with seven different paths for each map. The quality and numeric results showed that the agent with the imagination module could generate more reliable paths without passing beneath the object, with the cost of a longer path and slower velocity.
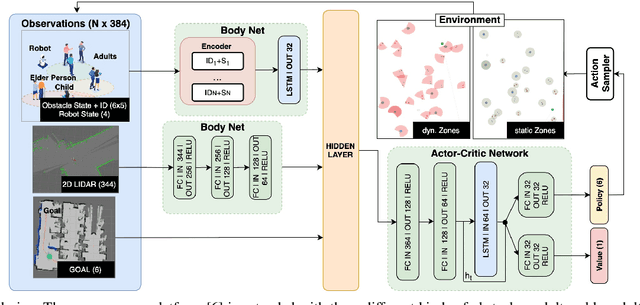
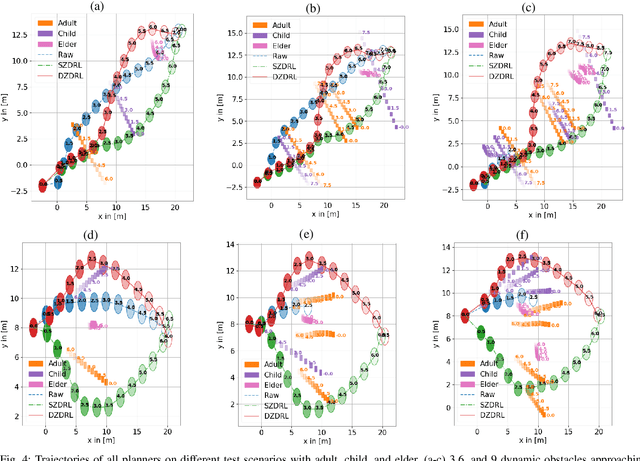
Human-Following and -guiding in Crowded Environments using Semantic Deep-Reinforcement-Learning for Mobile Service Robots
Jun 12, 2022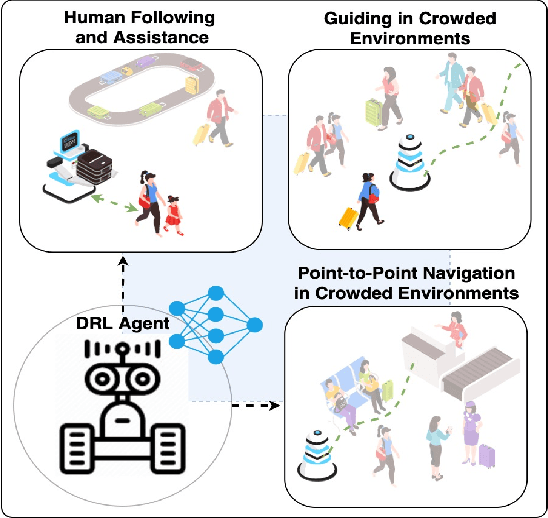
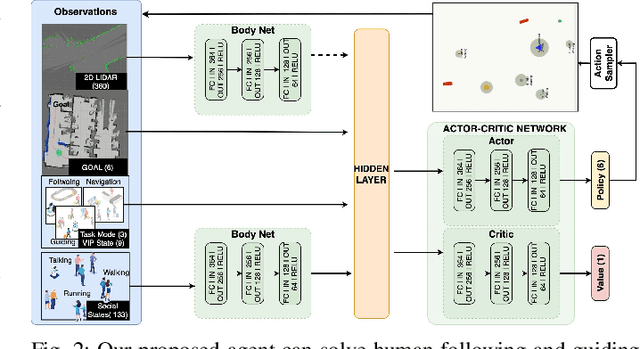
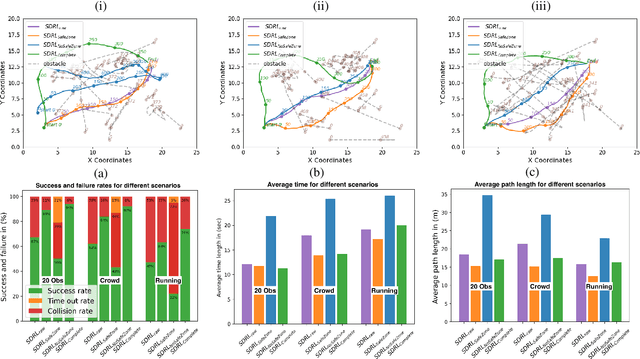
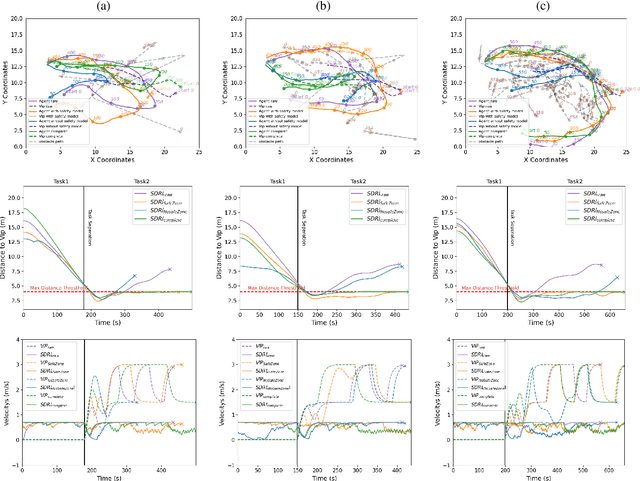
Assistance robots have gained widespread attention in various industries such as logistics and human assistance. The tasks of guiding or following a human in a crowded environment such as airports or train stations to carry weight or goods is still an open problem. In these use cases, the robot is not only required to intelligently interact with humans, but also to navigate safely among crowds. Thus, especially highly dynamic environments pose a grand challenge due to the volatile behavior patterns and unpredictable movements of humans. In this paper, we propose a Deep-Reinforcement-Learning-based agent for human-guiding and -following tasks in crowded environments. Therefore, we incorporate semantic information to provide the agent with high-level information like the social states of humans, safety models, and class types. We evaluate our proposed approach against a benchmark approach without semantic information and demonstrated enhanced navigational safety and robustness. Moreover, we demonstrate that the agent could learn to adapt its behavior to humans, which improves the human-robot interaction significantly.
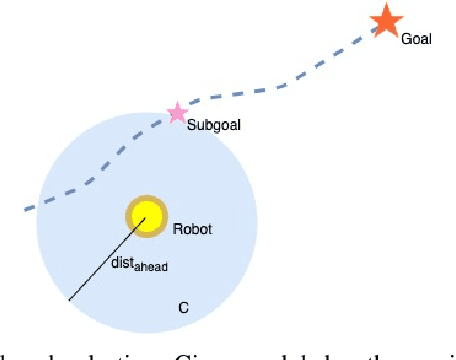
Obstacle-aware Waypoint Generation for Long-range Guidance of Deep-Reinforcement-Learning-based Navigation Approaches
Sep 23, 2021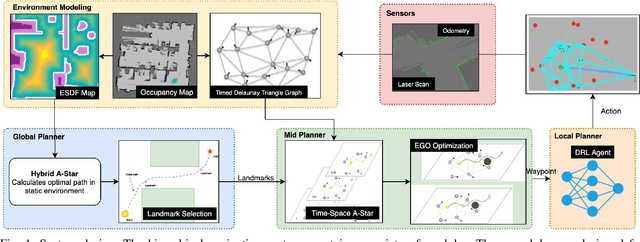
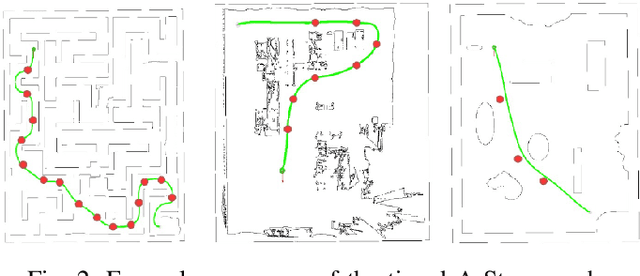
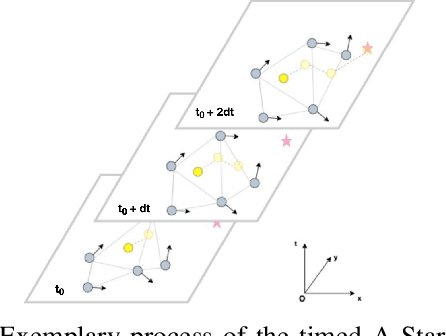
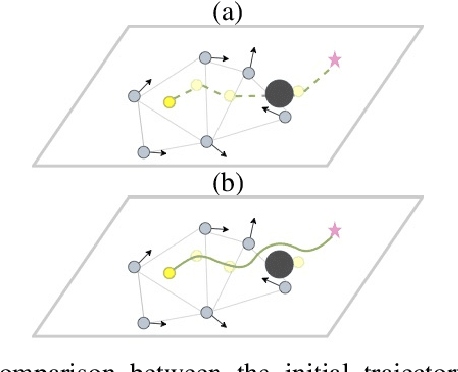
Navigation of mobile robots within crowded environments is an essential task in various use cases, such as delivery, health care, or logistics. Deep Reinforcement Learning (DRL) emerged as an alternative method to replace overly conservative approaches and promises more efficient and flexible navigation. However, Deep Reinforcement Learning is limited to local navigation due to its myopic nature. Previous research works proposed various ways to combine Deep Reinforcement Learning with conventional methods but a common problem is the complexity of highly dynamic environments due to the unpredictability of humans and other objects within the environment. In this paper, we propose a hierarchical waypoint generator, which considers moving obstacles and thus generates safer and more robust waypoints for Deep-Reinforcement-Learning-based local planners. Therefore, we utilize Delaunay Triangulation to encode obstacles and incorporate an extended hybrid A-Star approach to efficiently search for an optimal solution in the time-state space. We compared our waypoint generator against two baseline approaches and outperform them in terms of safety, efficiency, and robustness.
Enhancing Navigational Safety in Crowded Environments using Semantic-Deep-Reinforcement-Learning-based Navigation
Sep 23, 2021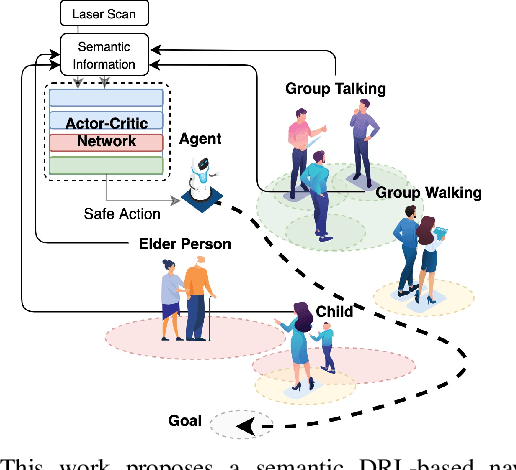
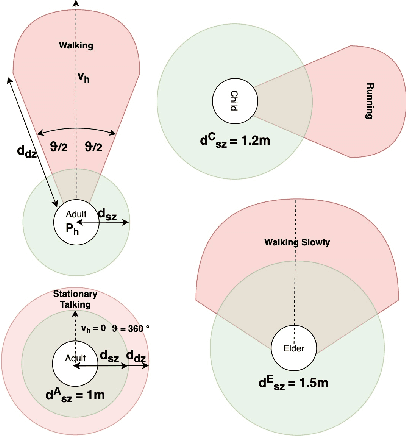
Intelligent navigation among social crowds is an essential aspect of mobile robotics for applications such as delivery, health care, or assistance. Deep Reinforcement Learning emerged as an alternative planning method to conservative approaches and promises more efficient and flexible navigation. However, in highly dynamic environments employing different kinds of obstacle classes, safe navigation still presents a grand challenge. In this paper, we propose a semantic Deep-reinforcement-learning-based navigation approach that teaches object-specific safety rules by considering high-level obstacle information. In particular, the agent learns object-specific behavior by contemplating the specific danger zones to enhance safety around vulnerable object classes. We tested the approach against a benchmark obstacle avoidance approach and found an increase in safety. Furthermore, we demonstrate that the agent could learn to navigate more safely by keeping an individual safety distance dependent on the semantic information.
Connecting Deep-Reinforcement-Learning-based Obstacle Avoidance with Conventional Global Planners using Waypoint Generators
Apr 08, 2021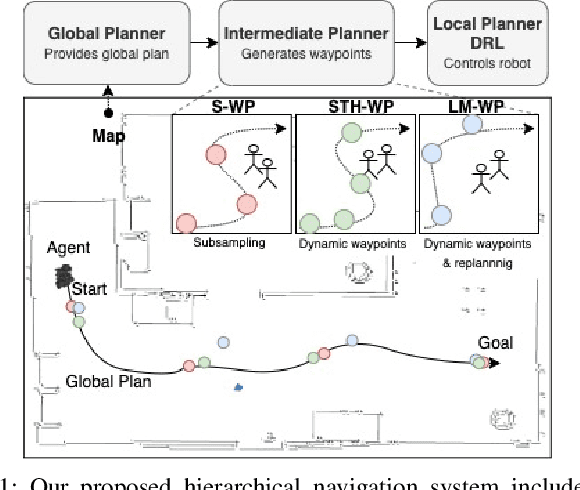
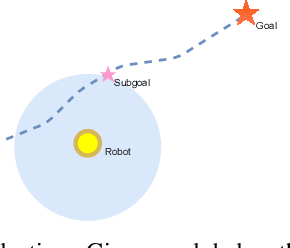
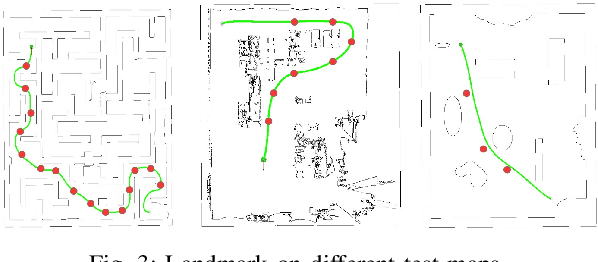
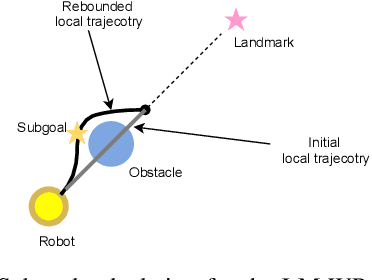
Deep Reinforcement Learning has emerged as an efficient dynamic obstacle avoidance method in highly dynamic environments. It has the potential to replace overly conservative or inefficient navigation approaches. However, the integration of Deep Reinforcement Learning into existing navigation systems is still an open frontier due to the myopic nature of Deep-Reinforcement-Learning-based navigation, which hinders its widespread integration into current navigation systems. In this paper, we propose the concept of an intermediate planner to interconnect novel Deep-Reinforcement-Learning-based obstacle avoidance with conventional global planning methods using waypoint generation. Therefore, we integrate different waypoint generators into existing navigation systems and compare the joint system against traditional ones. We found an increased performance in terms of safety, efficiency and path smoothness especially in highly dynamic environments.
Spatial Imagination With Semantic Cognition for Mobile Robots
Apr 08, 2021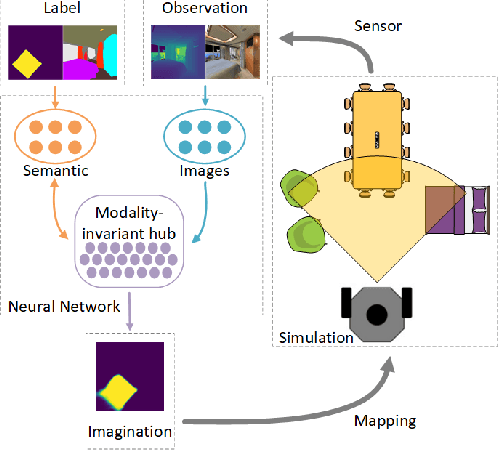
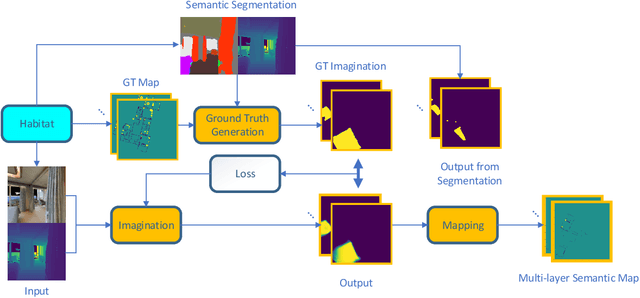
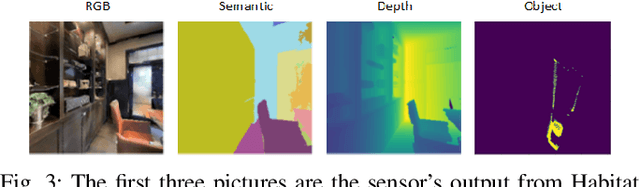
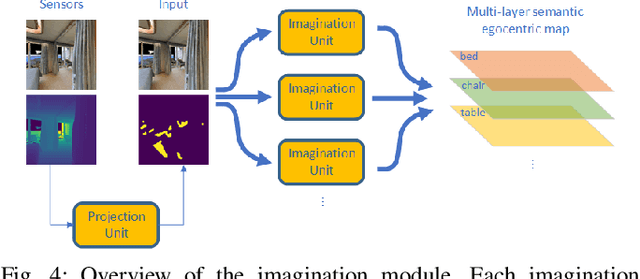
The imagination of the surrounding environment based on experience and semantic cognition has great potential to extend the limited observations and provide more information for mapping, collision avoidance, and path planning. This paper provides a training-based algorithm for mobile robots to perform spatial imagination based on semantic cognition and evaluates the proposed method for the mapping task. We utilize a photo-realistic simulation environment, Habitat, for training and evaluation. The trained model is composed of Resent-18 as encoder and Unet as the backbone. We demonstrate that the algorithm can perform imagination for unseen parts of the object universally, by recalling the images and experience and compare our approach with traditional semantic mapping methods. It is found that our approach will improve the efficiency and accuracy of semantic mapping.
Towards Deployment of Deep-Reinforcement-Learning-Based Obstacle Avoidance into Conventional Autonomous Navigation Systems
Apr 08, 2021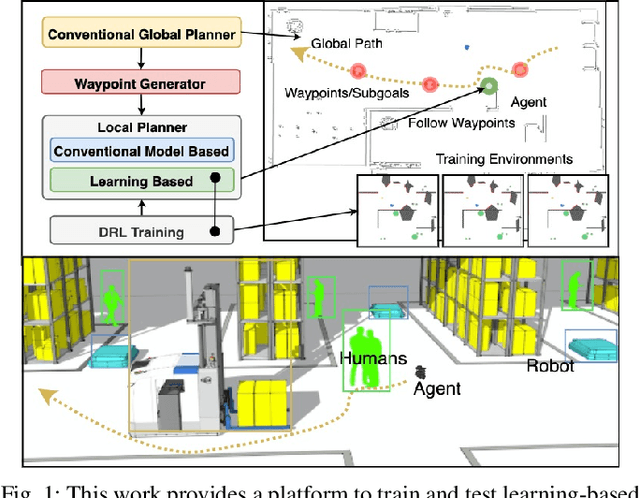
Recently, mobile robots have become important tools in various industries, especially in logistics. Deep reinforcement learning emerged as an alternative planning method to replace overly conservative approaches and promises more efficient and flexible navigation. However, deep reinforcement learning approaches are not suitable for long-range navigation due to their proneness to local minima and lack of long term memory, which hinders its widespread integration into industrial applications of mobile robotics. In this paper, we propose a navigation system incorporating deep-reinforcement-learning-based local planners into conventional navigation stacks for long-range navigation. Therefore, a framework for training and testing the deep reinforcement learning algorithms along with classic approaches is presented. We evaluated our deep-reinforcement-learning-enhanced navigation system against various conventional planners and found that our system outperforms them in terms of safety, efficiency and robustness.