 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Image": models, code, and papers
Privacy-Preserving Video Classification with Convolutional Neural Networks
Feb 06, 2021
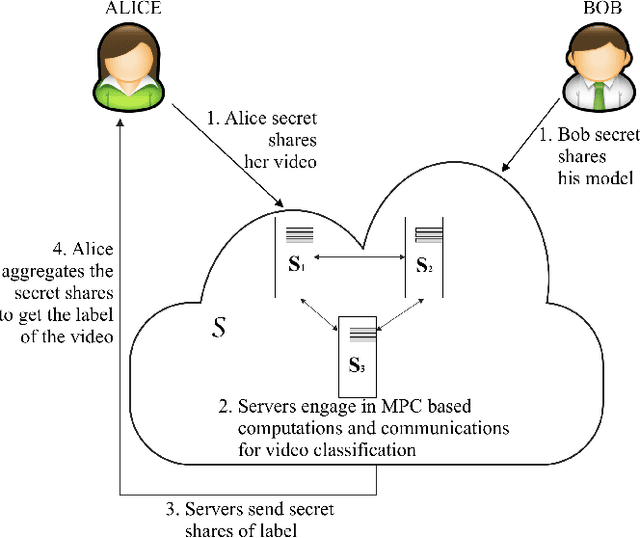
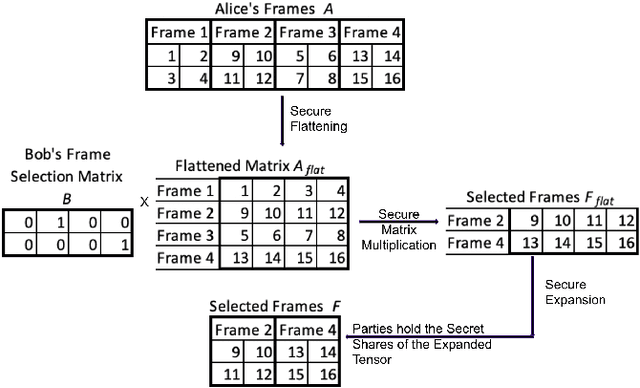
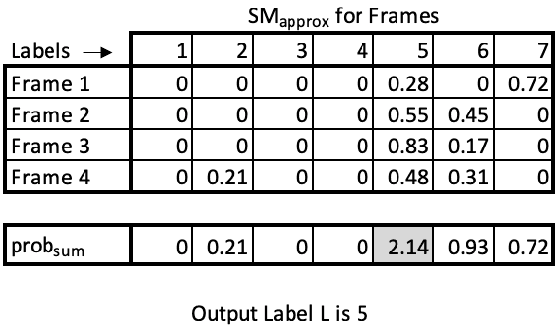
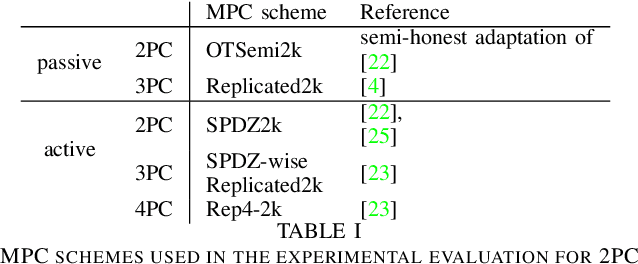
Many video classification applications require access to personal data, thereby posing an invasive security risk to the users' privacy. We propose a privacy-preserving implementation of single-frame method based video classification with convolutional neural networks that allows a party to infer a label from a video without necessitating the video owner to disclose their video to other entities in an unencrypted manner. Similarly, our approach removes the requirement of the classifier owner from revealing their model parameters to outside entities in plaintext. To this end, we combine existing Secure Multi-Party Computation (MPC) protocols for private image classification with our novel MPC protocols for oblivious single-frame selection and secure label aggregation across frames. The result is an end-to-end privacy-preserving video classification pipeline. We evaluate our proposed solution in an application for private human emotion recognition. Our results across a variety of security settings, spanning honest and dishonest majority configurations of the computing parties, and for both passive and active adversaries, demonstrate that videos can be classified with state-of-the-art accuracy, and without leaking sensitive user information.
Fast and Incremental Loop Closure Detection with Deep Features and Proximity Graphs
Sep 29, 2020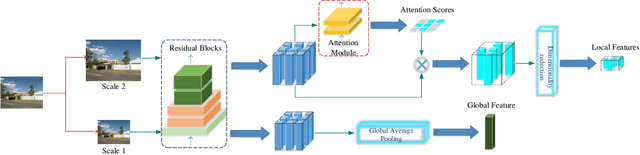
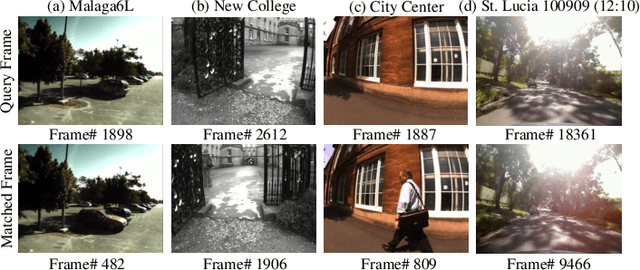
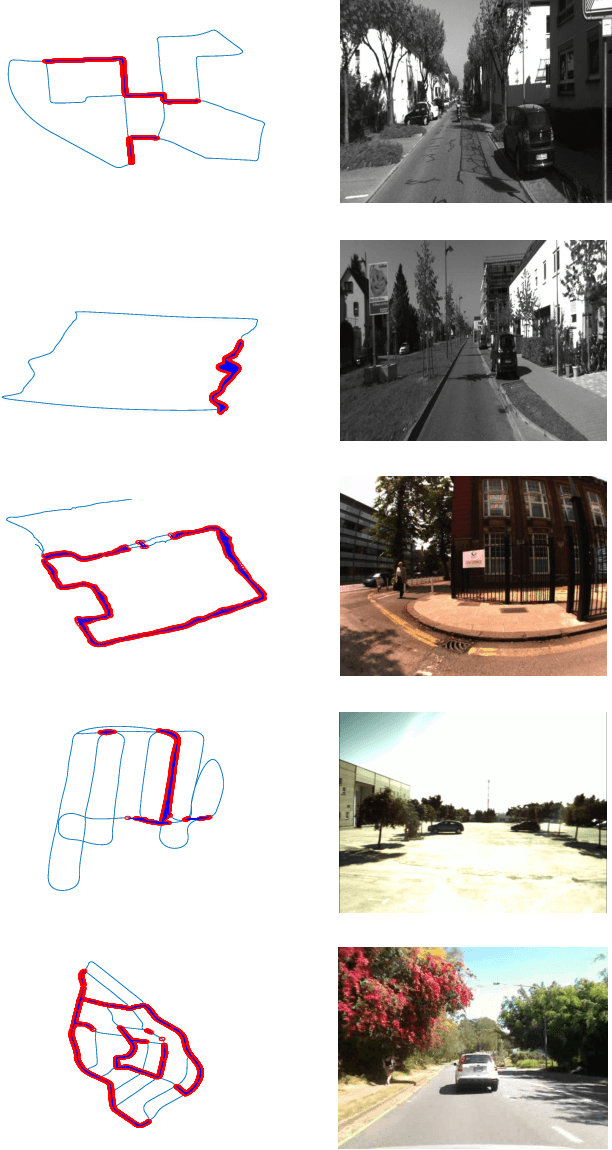
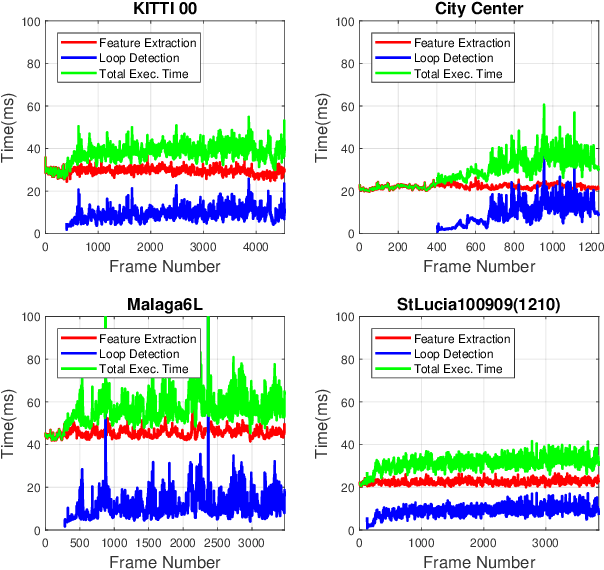
In recent years, methods concerning the place recognition task have been extensively examined from the robotics community within the scope of simultaneous localization and mapping applications. In this article, an appearance-based loop closure detection pipeline is proposed, entitled "FILD++" (Fast and Incremental Loop closure Detection). When the incoming camera observation arrives, global and local visual features are extracted through two passes of a single convolutional neural network. Subsequently, a modified hierarchical-navigable small-world graph incrementally generates a visual database that represents the robot's traversed path based on global features. Given the query sensor measurement, similar locations from the trajectory are retrieved using these representations, while an image-to-image pairing is further evaluated thanks to the spatial information provided by the local features. Exhaustive experiments on several publicly-available datasets exhibit the system's high performance and low execution time compared to other contemporary state-of-the-art pipelines.
Two-way kernel matrix puncturing: towards resource-efficient PCA and spectral clustering
Feb 25, 2021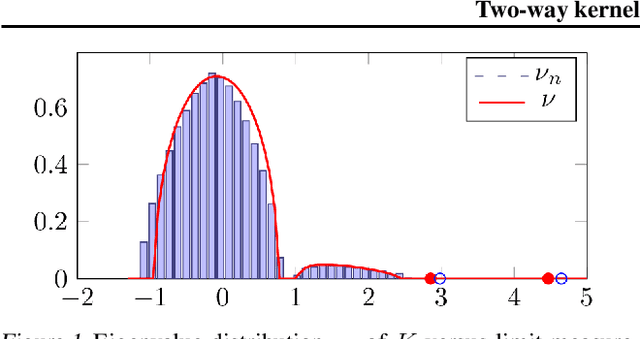
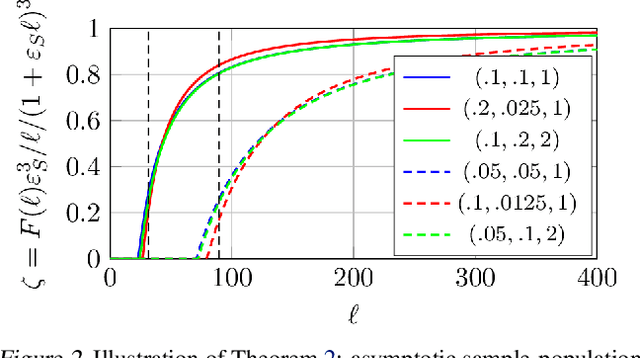
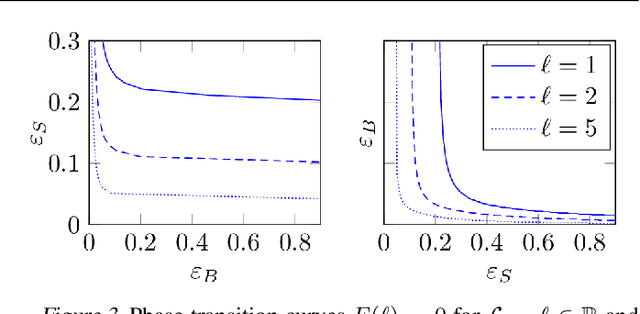
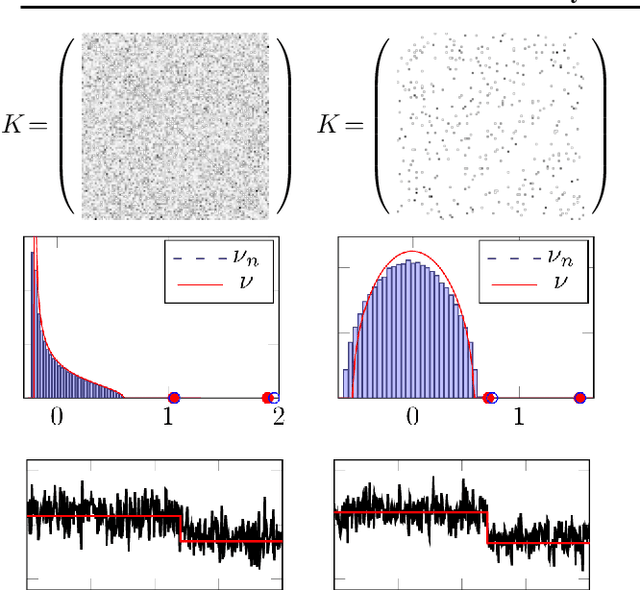
The article introduces an elementary cost and storage reduction method for spectral clustering and principal component analysis. The method consists in randomly "puncturing" both the data matrix $X\in\mathbb{C}^{p\times n}$ (or $\mathbb{R}^{p\times n}$) and its corresponding kernel (Gram) matrix $K$ through Bernoulli masks: $S\in\{0,1\}^{p\times n}$ for $X$ and $B\in\{0,1\}^{n\times n}$ for $K$. The resulting "two-way punctured" kernel is thus given by $K=\frac{1}{p}[(X \odot S)^{\sf H} (X \odot S)] \odot B$. We demonstrate that, for $X$ composed of independent columns drawn from a Gaussian mixture model, as $n,p\to\infty$ with $p/n\to c_0\in(0,\infty)$, the spectral behavior of $K$ -- its limiting eigenvalue distribution, as well as its isolated eigenvalues and eigenvectors -- is fully tractable and exhibits a series of counter-intuitive phenomena. We notably prove, and empirically confirm on GAN-generated image databases, that it is possible to drastically puncture the data, thereby providing possibly huge computational and storage gains, for a virtually constant (clustering of PCA) performance. This preliminary study opens as such the path towards rethinking, from a large dimensional standpoint, computational and storage costs in elementary machine learning models.
Depth Assisted Full Resolution Network for Single Image-based View Synthesis
Nov 17, 2017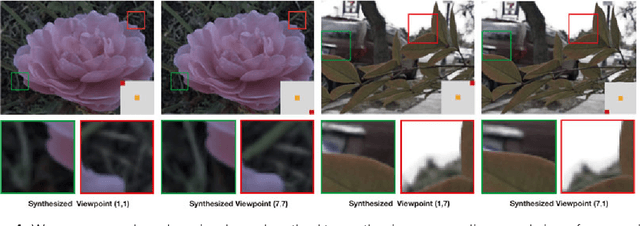
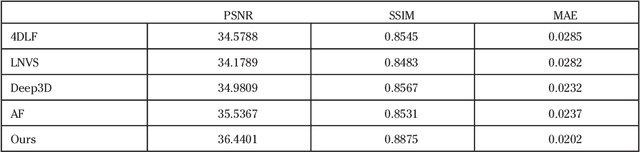
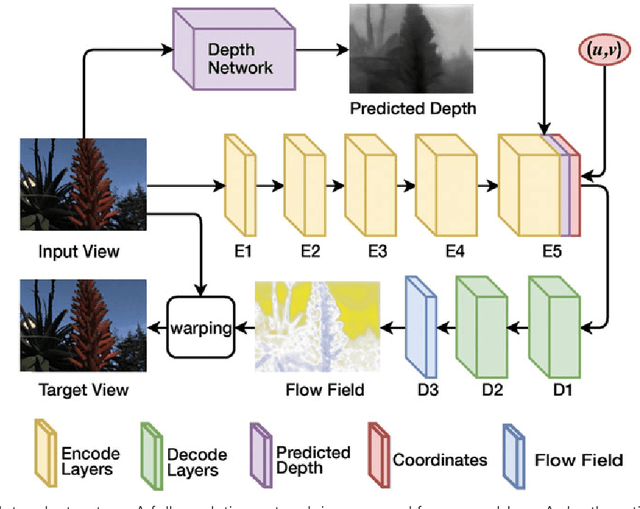
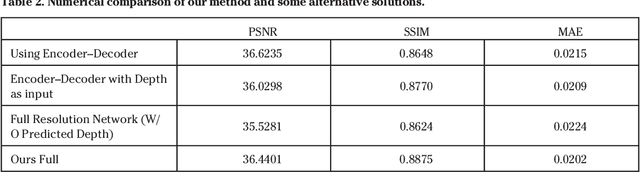
Researches in novel viewpoint synthesis majorly focus on interpolation from multi-view input images. In this paper, we focus on a more challenging and ill-posed problem that is to synthesize novel viewpoints from one single input image. To achieve this goal, we propose a novel deep learning-based technique. We design a full resolution network that extracts local image features with the same resolution of the input, which contributes to derive high resolution and prevent blurry artifacts in the final synthesized images. We also involve a pre-trained depth estimation network into our system, and thus 3D information is able to be utilized to infer the flow field between the input and the target image. Since the depth network is trained by depth order information between arbitrary pairs of points in the scene, global image features are also involved into our system. Finally, a synthesis layer is used to not only warp the observed pixels to the desired positions but also hallucinate the missing pixels with recorded pixels. Experiments show that our technique performs well on images of various scenes, and outperforms the state-of-the-art techniques.
GREEN: a Graph REsidual rE-ranking Network for Grading Diabetic Retinopathy
Jul 20, 2020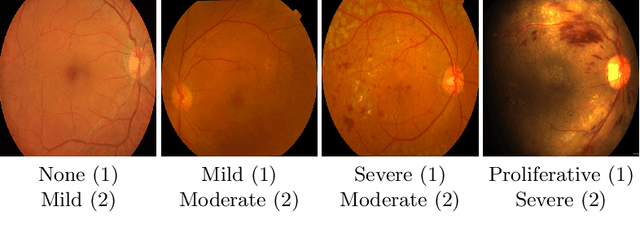
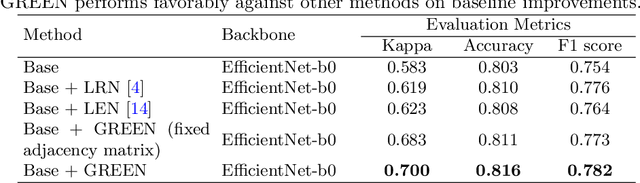
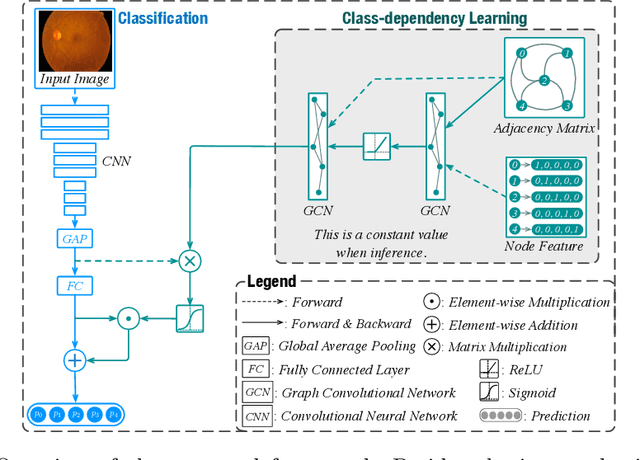
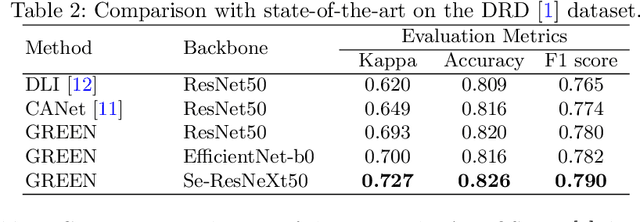
The automatic grading of diabetic retinopathy (DR) facilitates medical diagnosis for both patients and physicians. Existing researches formulate DR grading as an image classification problem. As the stages/categories of DR correlate with each other, the relationship between different classes cannot be explicitly described via a one-hot label because it is empirically estimated by different physicians with different outcomes. This class correlation limits existing networks to achieve effective classification. In this paper, we propose a Graph REsidual rE-ranking Network (GREEN) to introduce a class dependency prior into the original image classification network. The class dependency prior is represented by a graph convolutional network with an adjacency matrix. This prior augments image classification pipeline by re-ranking classification results in a residual aggregation manner. Experiments on the standard benchmarks have shown that GREEN performs favorably against state-of-the-art approaches.
Planning Paths Through Unknown Space by Imagining What Lies Therein
Nov 14, 2020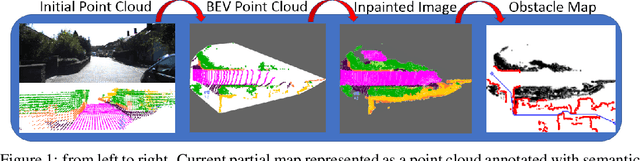
This paper presents a novel framework for planning paths in maps containing unknown spaces, such as from occlusions. Our approach takes as input a semantically-annotated point cloud, and leverages an image inpainting neural network to generate a reasonable model of unknown space as free or occupied. Our validation campaign shows that it is possible to greatly increase the performance of standard pathfinding algorithms which adopt the general optimistic assumption of treating unknown space as free.
Masked Linear Regression for Learning Local Receptive Fields for Facial Expression Synthesis
Nov 18, 2020

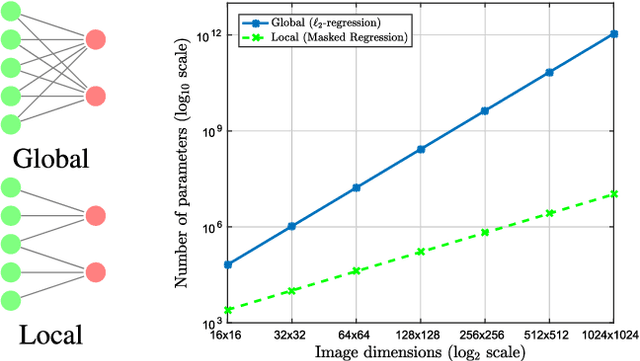
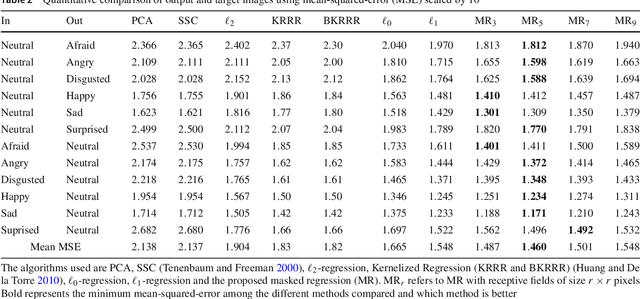
Compared to facial expression recognition, expression synthesis requires a very high-dimensional mapping. This problem exacerbates with increasing image sizes and limits existing expression synthesis approaches to relatively small images. We observe that facial expressions often constitute sparsely distributed and locally correlated changes from one expression to another. By exploiting this observation, the number of parameters in an expression synthesis model can be significantly reduced. Therefore, we propose a constrained version of ridge regression that exploits the local and sparse structure of facial expressions. We consider this model as masked regression for learning local receptive fields. In contrast to the existing approaches, our proposed model can be efficiently trained on larger image sizes. Experiments using three publicly available datasets demonstrate that our model is significantly better than $\ell_0, \ell_1$ and $\ell_2$-regression, SVD based approaches, and kernelized regression in terms of mean-squared-error, visual quality as well as computational and spatial complexities. The reduction in the number of parameters allows our method to generalize better even after training on smaller datasets. The proposed algorithm is also compared with state-of-the-art GANs including Pix2Pix, CycleGAN, StarGAN and GANimation. These GANs produce photo-realistic results as long as the testing and the training distributions are similar. In contrast, our results demonstrate significant generalization of the proposed algorithm over out-of-dataset human photographs, pencil sketches and even animal faces.
* IJCV Journal
Optimization for Medical Image Segmentation: Theory and Practice when evaluating with Dice Score or Jaccard Index
Oct 26, 2020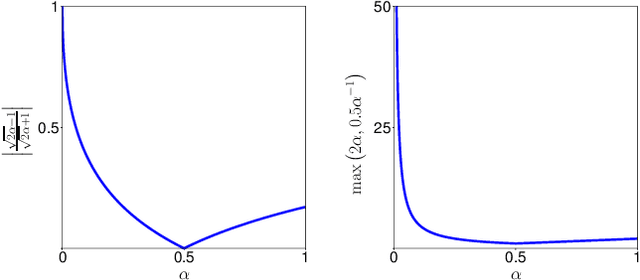
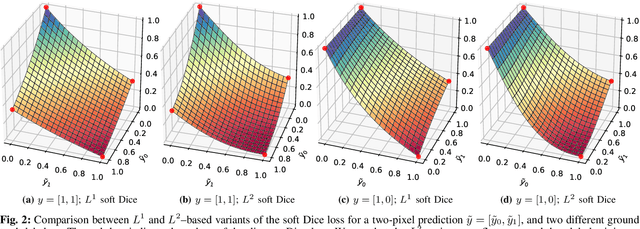
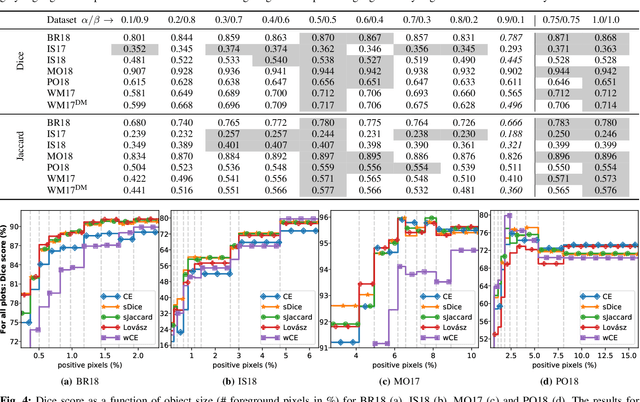
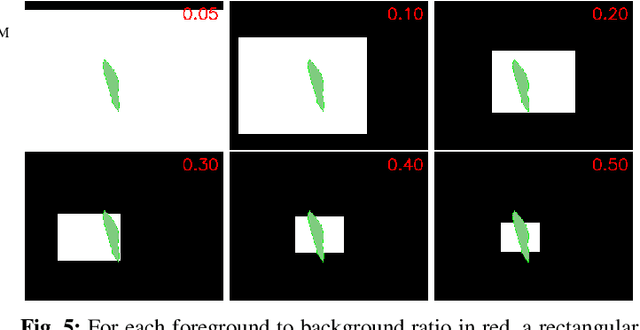
In many medical imaging and classical computer vision tasks, the Dice score and Jaccard index are used to evaluate the segmentation performance. Despite the existence and great empirical success of metric-sensitive losses, i.e. relaxations of these metrics such as soft Dice, soft Jaccard and Lovasz-Softmax, many researchers still use per-pixel losses, such as (weighted) cross-entropy to train CNNs for segmentation. Therefore, the target metric is in many cases not directly optimized. We investigate from a theoretical perspective, the relation within the group of metric-sensitive loss functions and question the existence of an optimal weighting scheme for weighted cross-entropy to optimize the Dice score and Jaccard index at test time. We find that the Dice score and Jaccard index approximate each other relatively and absolutely, but we find no such approximation for a weighted Hamming similarity. For the Tversky loss, the approximation gets monotonically worse when deviating from the trivial weight setting where soft Tversky equals soft Dice. We verify these results empirically in an extensive validation on six medical segmentation tasks and can confirm that metric-sensitive losses are superior to cross-entropy based loss functions in case of evaluation with Dice Score or Jaccard Index. This further holds in a multi-class setting, and across different object sizes and foreground/background ratios. These results encourage a wider adoption of metric-sensitive loss functions for medical segmentation tasks where the performance measure of interest is the Dice score or Jaccard index.
Retrospective Motion Correction of MR Images using Prior-Assisted Deep Learning
Nov 28, 2020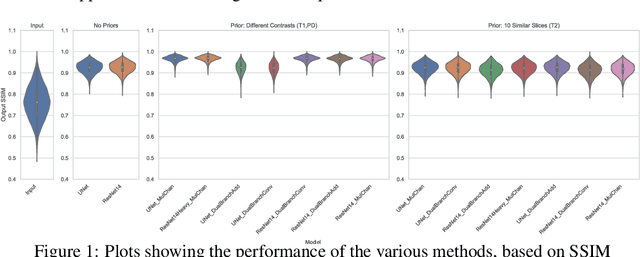
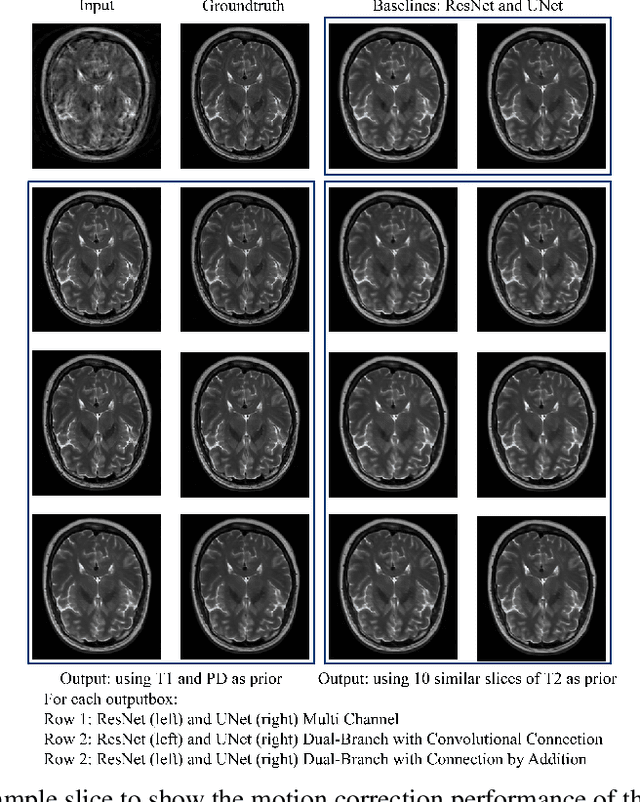
In MRI, motion artefacts are among the most common types of artefacts. They can degrade images and render them unusable for accurate diagnosis. Traditional methods, such as prospective or retrospective motion correction, have been proposed to avoid or alleviate motion artefacts. Recently, several other methods based on deep learning approaches have been proposed to solve this problem. This work proposes to enhance the performance of existing deep learning models by the inclusion of additional information present as image priors. The proposed approach has shown promising results and will be further investigated for clinical validity.
Back-Projection Pipeline
Jan 25, 2021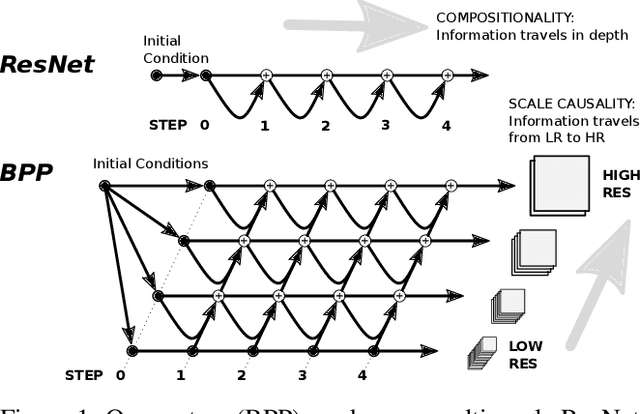
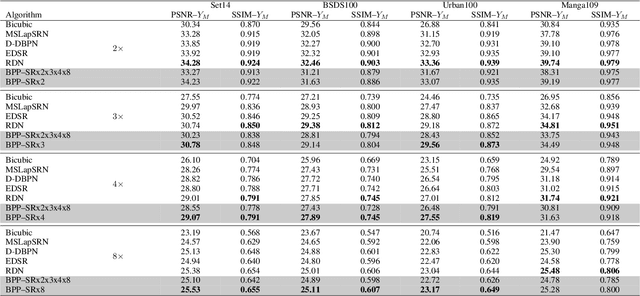
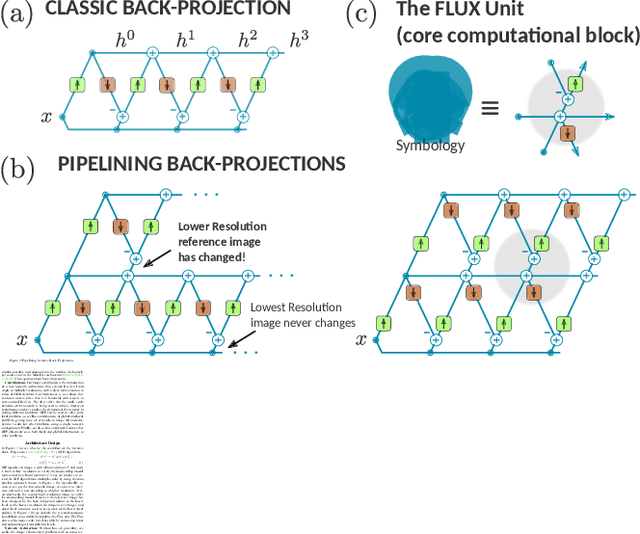
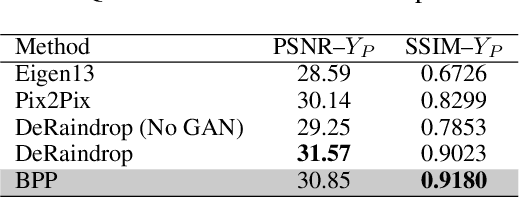
We propose a simple extension of residual networks that works simultaneously in multiple resolutions. Our network design is inspired by the iterative back-projection algorithm but seeks the more difficult task of learning how to enhance images. Compared to similar approaches, we propose a novel solution to make back-projections run in multiple resolutions by using a data pipeline workflow. Features are updated at multiple scales in each layer of the network. The update dynamic through these layers includes interactions between different resolutions in a way that is causal in scale, and it is represented by a system of ODEs, as opposed to a single ODE in the case of ResNets. The system can be used as a generic multi-resolution approach to enhance images. We test it on several challenging tasks with special focus on super-resolution and raindrop removal. Our results are competitive with state-of-the-arts and show a strong ability of our system to learn both global and local image features.