 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgeautonomous cars
Autonomous cars are self-driving vehicles that use artificial intelligence (AI) and sensors to navigate and operate without human intervention, using high-resolution cameras and lidars that detect what happens in the car's immediate surroundings. They have the potential to revolutionize transportation by improving safety, efficiency, and accessibility.
Papers and Code
Verification of Autonomous Neural Car Control with KeYmaera X
Apr 04, 2025This article presents a formal model and formal safety proofs for the ABZ'25 case study in differential dynamic logic (dL). The case study considers an autonomous car driving on a highway avoiding collisions with neighbouring cars. Using KeYmaera X's dL implementation, we prove absence of collision on an infinite time horizon which ensures that safety is preserved independently of trip length. The safety guarantees hold for time-varying reaction time and brake force. Our dL model considers the single lane scenario with cars ahead or behind. We demonstrate that dL with its tools is a rigorous foundation for runtime monitoring, shielding, and neural network verification. Doing so sheds light on inconsistencies between the provided specification and simulation environment highway-env of the ABZ'25 study. We attempt to fix these inconsistencies and uncover numerous counterexamples which also indicate issues in the provided reinforcement learning environment.
Scenario-based Compositional Verification of Autonomous Systems with Neural Perception
Apr 29, 2025Recent advances in deep learning have enabled the development of autonomous systems that use deep neural networks for perception. Formal verification of these systems is challenging due to the size and complexity of the perception DNNs as well as hard-to-quantify, changing environment conditions. To address these challenges, we propose a probabilistic verification framework for autonomous systems based on the following key concepts: (1) Scenario-based Modeling: We decompose the task (e.g., car navigation) into a composition of scenarios, each representing a different environment condition. (2) Probabilistic Abstractions: For each scenario, we build a compact abstraction of perception based on the DNN's performance on an offline dataset that represents the scenario's environment condition. (3) Symbolic Reasoning and Acceleration: The abstractions enable efficient compositional verification of the autonomous system via symbolic reasoning and a novel acceleration proof rule that bounds the error probability of the system under arbitrary variations of environment conditions. We illustrate our approach on two case studies: an experimental autonomous system that guides airplanes on taxiways using high-dimensional perception DNNs and a simulation model of an F1Tenth autonomous car using LiDAR observations.
Application of YOLOv8 in monocular downward multiple Car Target detection
May 15, 2025Autonomous driving technology is progressively transforming traditional car driving methods, marking a significant milestone in modern transportation. Object detection serves as a cornerstone of autonomous systems, playing a vital role in enhancing driving safety, enabling autonomous functionality, improving traffic efficiency, and facilitating effective emergency responses. However, current technologies such as radar for environmental perception, cameras for road perception, and vehicle sensor networks face notable challenges, including high costs, vulnerability to weather and lighting conditions, and limited resolution.To address these limitations, this paper presents an improved autonomous target detection network based on YOLOv8. By integrating structural reparameterization technology, a bidirectional pyramid structure network model, and a novel detection pipeline into the YOLOv8 framework, the proposed approach achieves highly efficient and precise detection of multi-scale, small, and remote objects. Experimental results demonstrate that the enhanced model can effectively detect both large and small objects with a detection accuracy of 65%, showcasing significant advancements over traditional methods.This improved model holds substantial potential for real-world applications and is well-suited for autonomous driving competitions, such as the Formula Student Autonomous China (FSAC), particularly excelling in scenarios involving single-target and small-object detection.
PaniCar: Securing the Perception of Advanced Driving Assistance Systems Against Emergency Vehicle Lighting
May 08, 2025



The safety of autonomous cars has come under scrutiny in recent years, especially after 16 documented incidents involving Teslas (with autopilot engaged) crashing into parked emergency vehicles (police cars, ambulances, and firetrucks). While previous studies have revealed that strong light sources often introduce flare artifacts in the captured image, which degrade the image quality, the impact of flare on object detection performance remains unclear. In this research, we unveil PaniCar, a digital phenomenon that causes an object detector's confidence score to fluctuate below detection thresholds when exposed to activated emergency vehicle lighting. This vulnerability poses a significant safety risk, and can cause autonomous vehicles to fail to detect objects near emergency vehicles. In addition, this vulnerability could be exploited by adversaries to compromise the security of advanced driving assistance systems (ADASs). We assess seven commercial ADASs (Tesla Model 3, "manufacturer C", HP, Pelsee, AZDOME, Imagebon, Rexing), four object detectors (YOLO, SSD, RetinaNet, Faster R-CNN), and 14 patterns of emergency vehicle lighting to understand the influence of various technical and environmental factors. We also evaluate four SOTA flare removal methods and show that their performance and latency are insufficient for real-time driving constraints. To mitigate this risk, we propose Caracetamol, a robust framework designed to enhance the resilience of object detectors against the effects of activated emergency vehicle lighting. Our evaluation shows that on YOLOv3 and Faster RCNN, Caracetamol improves the models' average confidence of car detection by 0.20, the lower confidence bound by 0.33, and reduces the fluctuation range by 0.33. In addition, Caracetamol is capable of processing frames at a rate of between 30-50 FPS, enabling real-time ADAS car detection.
Delayed Expansion AGT: Kinodynamic Planning with Application to Tractor-Trailer Parking
Jun 16, 2025



Kinodynamic planning of articulated vehicles in cluttered environments faces additional challenges arising from high-dimensional state space and complex system dynamics. Built upon [1],[2], this work proposes the DE-AGT algorithm that grows a tree using pre-computed motion primitives (MPs) and A* heuristics. The first feature of DE-AGT is a delayed expansion of MPs. In particular, the MPs are divided into different modes, which are ranked online. With the MP classification and prioritization, DE-AGT expands the most promising mode of MPs first, which eliminates unnecessary computation and finds solutions faster. To obtain the cost-to-go heuristic for nonholonomic articulated vehicles, we rely on supervised learning and train neural networks for fast and accurate cost-to-go prediction. The learned heuristic is used for online mode ranking and node selection. Another feature of DE-AGT is the improved goal-reaching. Exactly reaching a goal state usually requires a constant connection checking with the goal by solving steering problems -- non-trivial and time-consuming for articulated vehicles. The proposed termination scheme overcomes this challenge by tightly integrating a light-weight trajectory tracking controller with the search process. DE-AGT is implemented for autonomous parking of a general car-like tractor with 3-trailer. Simulation results show an average of 10x acceleration compared to a previous method.
Towards Unified Probabilistic Verification and Validation of Vision-Based Autonomy
Aug 19, 2025



Precise and comprehensive situational awareness is a critical capability of modern autonomous systems. Deep neural networks that perceive task-critical details from rich sensory signals have become ubiquitous; however, their black-box behavior and sensitivity to environmental uncertainty and distribution shifts make them challenging to verify formally. Abstraction-based verification techniques for vision-based autonomy produce safety guarantees contingent on rigid assumptions, such as bounded errors or known unique distributions. Such overly restrictive and inflexible assumptions limit the validity of the guarantees, especially in diverse and uncertain test-time environments. We propose a methodology that unifies the verification models of perception with their offline validation. Our methodology leverages interval MDPs and provides a flexible end-to-end guarantee that adapts directly to the out-of-distribution test-time conditions. We evaluate our methodology on a synthetic perception Markov chain with well-defined state estimation distributions and a mountain car benchmark. Our findings reveal that we can guarantee tight yet rigorous bounds on overall system safety.
Vision-based Lifting of 2D Object Detections for Automated Driving
Jun 13, 2025

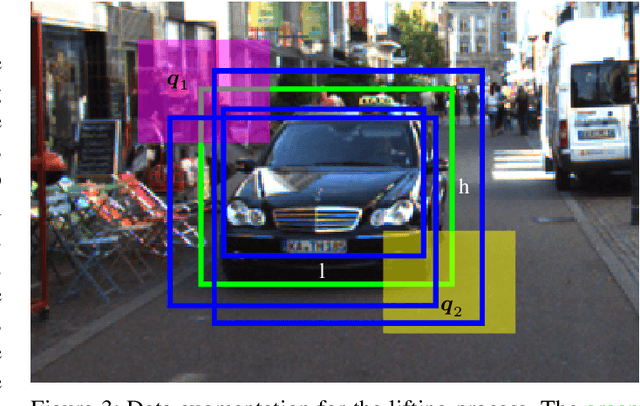

Image-based 3D object detection is an inevitable part of autonomous driving because cheap onboard cameras are already available in most modern cars. Because of the accurate depth information, currently, most state-of-the-art 3D object detectors heavily rely on LiDAR data. In this paper, we propose a pipeline which lifts the results of existing vision-based 2D algorithms to 3D detections using only cameras as a cost-effective alternative to LiDAR. In contrast to existing approaches, we focus not only on cars but on all types of road users. To the best of our knowledge, we are the first using a 2D CNN to process the point cloud for each 2D detection to keep the computational effort as low as possible. Our evaluation on the challenging KITTI 3D object detection benchmark shows results comparable to state-of-the-art image-based approaches while having a runtime of only a third.
* https://ieeexplore.ieee.org/document/9190325
DONUT: A Decoder-Only Model for Trajectory Prediction
Jun 07, 2025



Predicting the motion of other agents in a scene is highly relevant for autonomous driving, as it allows a self-driving car to anticipate. Inspired by the success of decoder-only models for language modeling, we propose DONUT, a Decoder-Only Network for Unrolling Trajectories. Different from existing encoder-decoder forecasting models, we encode historical trajectories and predict future trajectories with a single autoregressive model. This allows the model to make iterative predictions in a consistent manner, and ensures that the model is always provided with up-to-date information, enhancing the performance. Furthermore, inspired by multi-token prediction for language modeling, we introduce an 'overprediction' strategy that gives the network the auxiliary task of predicting trajectories at longer temporal horizons. This allows the model to better anticipate the future, and further improves the performance. With experiments, we demonstrate that our decoder-only approach outperforms the encoder-decoder baseline, and achieves new state-of-the-art results on the Argoverse 2 single-agent motion forecasting benchmark.
RBR4DNN: Requirements-based Testing of Neural Networks
Apr 03, 2025



Deep neural network (DNN) testing is crucial for the reliability and safety of critical systems, where failures can have severe consequences. Although various techniques have been developed to create robustness test suites, requirements-based testing for DNNs remains largely unexplored -- yet such tests are recognized as an essential component of software validation of critical systems. In this work, we propose a requirements-based test suite generation method that uses structured natural language requirements formulated in a semantic feature space to create test suites by prompting text-conditional latent diffusion models with the requirement precondition and then using the associated postcondition to define a test oracle to judge outputs of the DNN under test. We investigate the approach using fine-tuned variants of pre-trained generative models. Our experiments on the MNIST, CelebA-HQ, ImageNet, and autonomous car driving datasets demonstrate that the generated test suites are realistic, diverse, consistent with preconditions, and capable of revealing faults.
Markov Regime-Switching Intelligent Driver Model for Interpretable Car-Following Behavior
Jun 17, 2025Accurate and interpretable car-following models are essential for traffic simulation and autonomous vehicle development. However, classical models like the Intelligent Driver Model (IDM) are fundamentally limited by their parsimonious and single-regime structure. They fail to capture the multi-modal nature of human driving, where a single driving state (e.g., speed, relative speed, and gap) can elicit many different driver actions. This forces the model to average across distinct behaviors, reducing its fidelity and making its parameters difficult to interpret. To overcome this, we introduce a regime-switching framework that allows driving behavior to be governed by different IDM parameter sets, each corresponding to an interpretable behavioral mode. This design enables the model to dynamically switch between interpretable behavioral modes, rather than averaging across diverse driving contexts. We instantiate the framework using a Factorial Hidden Markov Model with IDM dynamics (FHMM-IDM), which explicitly separates intrinsic driving regimes (e.g., aggressive acceleration, steady-state following) from external traffic scenarios (e.g., free-flow, congestion, stop-and-go) through two independent latent Markov processes. Bayesian inference via Markov chain Monte Carlo (MCMC) is used to jointly estimate the regime-specific parameters, transition dynamics, and latent state trajectories. Experiments on the HighD dataset demonstrate that FHMM-IDM uncovers interpretable structure in human driving, effectively disentangling internal driver actions from contextual traffic conditions and revealing dynamic regime-switching patterns. This framework provides a tractable and principled solution to modeling context-dependent driving behavior under uncertainty, offering improvements in the fidelity of traffic simulations, the efficacy of safety analyses, and the development of more human-centric ADAS.