 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAUTHENTICATION: Identifying Rare Failure Modes in Autonomous Vehicle Perception Systems using Adversarially Guided Diffusion Models
Apr 24, 2025Autonomous Vehicles (AVs) rely on artificial intelligence (AI) to accurately detect objects and interpret their surroundings. However, even when trained using millions of miles of real-world data, AVs are often unable to detect rare failure modes (RFMs). The problem of RFMs is commonly referred to as the "long-tail challenge", due to the distribution of data including many instances that are very rarely seen. In this paper, we present a novel approach that utilizes advanced generative and explainable AI techniques to aid in understanding RFMs. Our methods can be used to enhance the robustness and reliability of AVs when combined with both downstream model training and testing. We extract segmentation masks for objects of interest (e.g., cars) and invert them to create environmental masks. These masks, combined with carefully crafted text prompts, are fed into a custom diffusion model. We leverage the Stable Diffusion inpainting model guided by adversarial noise optimization to generate images containing diverse environments designed to evade object detection models and expose vulnerabilities in AI systems. Finally, we produce natural language descriptions of the generated RFMs that can guide developers and policymakers to improve the safety and reliability of AV systems.
Context-Awareness and Interpretability of Rare Occurrences for Discovery and Formalization of Critical Failure Modes
Apr 18, 2025Vision systems are increasingly deployed in critical domains such as surveillance, law enforcement, and transportation. However, their vulnerabilities to rare or unforeseen scenarios pose significant safety risks. To address these challenges, we introduce Context-Awareness and Interpretability of Rare Occurrences (CAIRO), an ontology-based human-assistive discovery framework for failure cases (or CP - Critical Phenomena) detection and formalization. CAIRO by design incentivizes human-in-the-loop for testing and evaluation of criticality that arises from misdetections, adversarial attacks, and hallucinations in AI black-box models. Our robust analysis of object detection model(s) failures in automated driving systems (ADS) showcases scalable and interpretable ways of formalizing the observed gaps between camera perception and real-world contexts, resulting in test cases stored as explicit knowledge graphs (in OWL/XML format) amenable for sharing, downstream analysis, logical reasoning, and accountability.
Crash Data Augmentation Using Conditional Generative Adversarial Networks (CGAN) for Improving Safety Performance Functions
Dec 21, 2021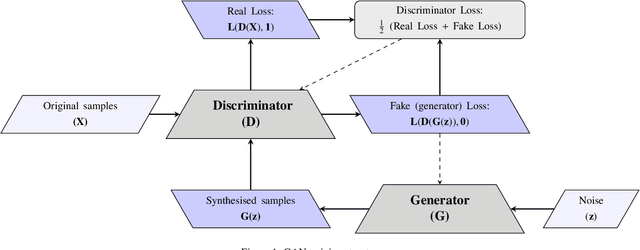
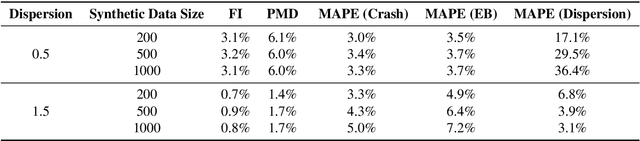
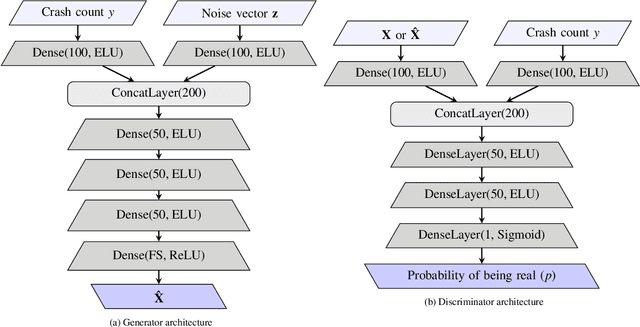
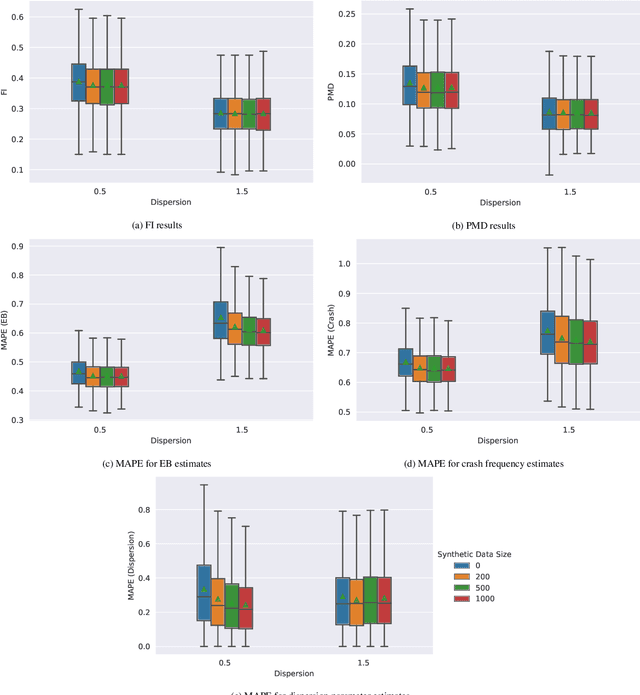
In this paper, we present a crash frequency data augmentation method based on Conditional Generative Adversarial Networks to improve crash frequency models. The proposed method is evaluated by comparing the performance of Base SPFs (developed using original data) and Augmented SPFs (developed using original data plus synthesised data) in terms of hotspot identification performance, model prediction accuracy, and dispersion parameter estimation accuracy. The experiments are conducted using simulated and real-world crash data sets. The results indicate that the synthesised crash data by CGAN have the same distribution as the original data and the Augmented SPFs outperforms Base SPFs in almost all aspects especially when the dispersion parameter is low.
CGAN-EB: A Non-parametric Empirical Bayes Method for Crash Hotspot Identification Using Conditional Generative Adversarial Networks: A Real-world Crash Data Study
Dec 16, 2021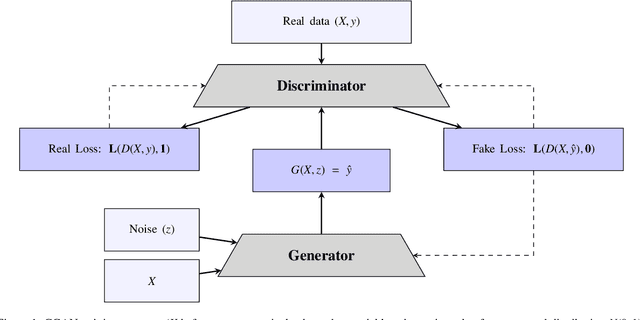
The empirical Bayes (EB) method based on parametric statistical models such as the negative binomial (NB) has been widely used for ranking sites in road network safety screening process. This paper is the continuation of the authors previous research, where a novel non-parametric EB method for modelling crash frequency data data based on Conditional Generative Adversarial Networks (CGAN) was proposed and evaluated over several simulated crash data sets. Unlike parametric approaches, there is no need for a pre-specified underlying relationship between dependent and independent variables in the proposed CGAN-EB and they are able to model any types of distributions. The proposed methodology is now applied to a real-world data set collected for road segments from 2012 to 2017 in Washington State. The performance of CGAN-EB in terms of model fit, predictive performance and network screening outcomes is compared with the conventional approach (NB-EB) as a benchmark. The results indicate that the proposed CGAN-EB approach outperforms NB-EB in terms of prediction power and hotspot identification tests.
CGAN-EB: A Non-parametric Empirical Bayes Method for Crash Hotspot Identification Using Conditional Generative Adversarial Networks: A Simulated Crash Data Study
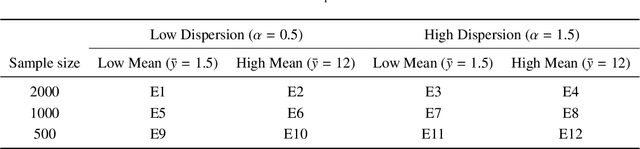
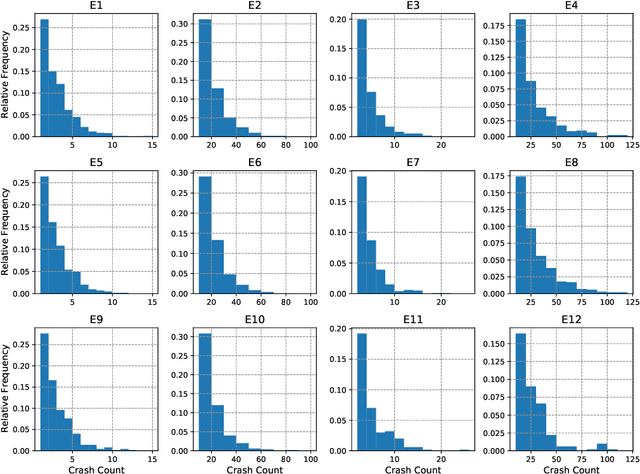
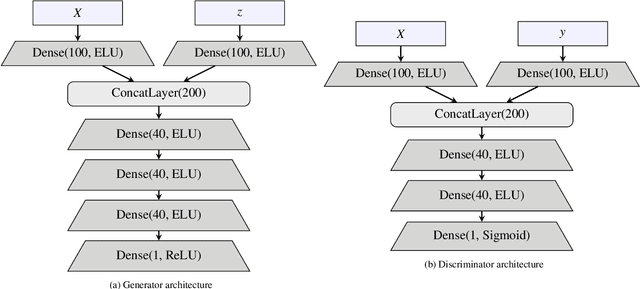
Dec 13, 2021In this paper, a new non-parametric empirical Bayes approach called CGAN-EB is proposed for approximating empirical Bayes (EB) estimates in traffic locations (e.g., road segments) which benefits from the modeling advantages of deep neural networks, and its performance is compared in a simulation study with the traditional approach based on negative binomial model (NB-EB). The NB-EB uses negative binomial model in order to model the crash data and is the most common approach in practice. To model the crash data in the proposed CGAN-EB, conditional generative adversarial network is used, which is a powerful deep neural network based method that can model any types of distributions. A number of simulation experiments are designed and conducted to evaluate the CGAN-EB performance in different conditions and compare it with the NB-EB. The results show that CGAN-EB performs as well as NB-EB when conditions favor the NB-EB model (i.e. data conform to the assumptions of the NB model) and outperforms NB-EB in experiments reflecting conditions frequently encountered in practice, specifically low sample means, and when crash frequency does not follow a log-linear relationship with covariates.