 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeU-TTT: Towards Generalizable PET Image Denoising via Test-Time Training
Jun 09, 2026Existing deep learning models for Positron Emission Tomography (PET) image denoising often suffer from severe performance degradation under distribution shifts, fundamentally restricting their robust clinical deployment. This lack of generalization stems from the conventional paradigm of fixed-parameter models that cannot adapt to variations in test data (e.g., dose levels or scanner types) after training. To overcome this limitation and achieve robust generalization, we introduce U-TTT, a novel U-shaped model that integrates Test-Time Training (TTT) layers to dynamically adjust model parameters during inference through self-supervision, thereby adapting to the specific characteristics of each test instance. Furthermore, to comprehensively capture the complex degradations of 3D PET data, U-TTT features a dual-domain adaptation mechanism comprising a Spatial Test-Time Training (S-TTT) layer and a Frequency Test-Time Training (F-TTT) layer. The S-TTT layer captures and corrects spatial structural degradations, while the F-TTT layer suppresses global noise spectra and restores delicate high-frequency details. Extensive experiments demonstrate that U-TTT achieves state-of-the-art PET denoising performance and exhibits superior generalization under challenging distribution shifts, including both unseen dose levels and unseen scanners. Our code will be available at https://github.com/Yaziwel/U-TTT.
UniPET: a universal network for high-quality PET image denoising across varied dose reduction factors
Jun 09, 2026Most existing deep learning-based PET image denoising methods assume a fixed and known dose reduction factor (DRF) for low-dose PET images. However, these methods encounter significant performance degradation when the DRF varies beyond the assumed one in practical applications. To address the challenge posed by varied DRFs, several preliminary studies focus on the task of universal PET image denoising, aiming to train a universal model over low-dose data across DRFs. Nonetheless, these vanilla universal models often struggle with misaligned styles present in different DRF data, leading to the \textit{style elimination issue} with a significant over-smoothing effect. To deal with this issue, we innovatively introduce domain generalization to PET image denoising and propose a universal PET image denoising network (UniPET) to achieve high-quality PET image denoising across diverse DRFs. UniPET comprises two primary innovations: a style alignment network (SAN) and a region-aware learning strategy (RALS). Specifically, SAN utilizes style alignment techniques derived from domain generalization to align and recover styles across different DRFs, ensuring the model's generalizability across various DRFs while effectively preserving styles. Furthermore, to enhance style recovery, RALS distinguishes between flat and stylized regions, exclusively conducting adversarial learning on the latter, thereby more effectively guiding the model's focus towards learning stylized regions. It is demonstrated that our proposed UniPET can adaptively recover different DRF styles and achieve high-quality PET image denoising across DRFs. Comprehensive experiments show that UniPET exhibits comparable performance to individual DRF-specific models at specific DRFs and realizes state-of-the-art performance in universal PET image denoising quantitatively, perceptually, and clinically.
PepSpecBench: A Unified Evaluation Benchmark for Peptide Tandem Mass Spectrometry Prediction
May 03, 2026Tandem mass spectrometry provides a high-throughput framework for identifying and quantifying proteins in complex biological samples. In computational proteomics, predicting peptide MS/MS spectra is a critical task, enabling downstream applications such as large-scale peptide identification and quantification. While deep learning architectures have substantially improved prediction accuracy, three evaluation challenges obscure the true progress of the field. First, inconsistent data preprocessing and incompatible model output spaces hinder fair model comparison. Second, flawed data splitting strategies can permit hidden sequence leakage and inflate reported performance. Third, existing evaluations typically lack comprehensive cross-species benchmarking and systematic assessment of model robustness to influential experimental conditions. To address these challenges, we propose PepSpecBench, a unified benchmark for peptide MS/MS spectrum prediction. PepSpecBench standardizes data preprocessing across complementary public datasets, enforces a strict backbone-disjoint splitting strategy to eliminate sequence leakage, and evaluates diverse architectures within a shared fragment-ion representation space. It further introduces a comprehensive multi-species evaluation suite and physically grounded metadata perturbation probes to assess model robustness and instrument awareness. We uncover previously unrecognized performance discrepancies and robustness limitations across six representative models, providing actionable insights for future model design, evaluation and practical deployment.
HAM: A Training-Free Style Transfer Approach via Heterogeneous Attention Modulation for Diffusion Models
Mar 25, 2026Diffusion models have demonstrated remarkable performance in image generation, particularly within the domain of style transfer. Prevailing style transfer approaches typically leverage pre-trained diffusion models' robust feature extraction capabilities alongside external modular control pathways to explicitly impose style guidance signals. However, these methods often fail to capture complex style reference or retain the identity of user-provided content images, thus falling into the trap of style-content balance. Thus, we propose a training-free style transfer approach via $\textbf{h}$eterogeneous $\textbf{a}$ttention $\textbf{m}$odulation ($\textbf{HAM}$) to protect identity information during image/text-guided style reference transfer, thereby addressing the style-content trade-off challenge. Specifically, we first introduces style noise initialization to initialize latent noise for diffusion. Then, during the diffusion process, it innovatively employs HAM for different attention mechanisms, including Global Attention Regulation (GAR) and Local Attention Transplantation (LAT), which better preserving the details of the content image while capturing complex style references. Our approach is validated through a series of qualitative and quantitative experiments, achieving state-of-the-art performance on multiple quantitative metrics.
Multi-Resolution Alignment for Voxel Sparsity in Camera-Based 3D Semantic Scene Completion
Feb 03, 2026Camera-based 3D semantic scene completion (SSC) offers a cost-effective solution for assessing the geometric occupancy and semantic labels of each voxel in the surrounding 3D scene with image inputs, providing a voxel-level scene perception foundation for the perception-prediction-planning autonomous driving systems. Although significant progress has been made in existing methods, their optimization rely solely on the supervision from voxel labels and face the challenge of voxel sparsity as a large portion of voxels in autonomous driving scenarios are empty, which limits both optimization efficiency and model performance. To address this issue, we propose a \textit{Multi-Resolution Alignment (MRA)} approach to mitigate voxel sparsity in camera-based 3D semantic scene completion, which exploits the scene and instance level alignment across multi-resolution 3D features as auxiliary supervision. Specifically, we first propose the Multi-resolution View Transformer module, which projects 2D image features into multi-resolution 3D features and aligns them at the scene level through fusing discriminative seed features. Furthermore, we design the Cubic Semantic Anisotropy module to identify the instance-level semantic significance of each voxel, accounting for the semantic differences of a specific voxel against its neighboring voxels within a cubic area. Finally, we devise a Critical Distribution Alignment module, which selects critical voxels as instance-level anchors with the guidance of cubic semantic anisotropy, and applies a circulated loss for auxiliary supervision on the critical feature distribution consistency across different resolutions. The code is available at https://github.com/PKU-ICST-MIPL/MRA_TIP.
CausalFSFG: Rethinking Few-Shot Fine-Grained Visual Categorization from Causal Perspective
Dec 25, 2025Few-shot fine-grained visual categorization (FS-FGVC) focuses on identifying various subcategories within a common superclass given just one or few support examples. Most existing methods aim to boost classification accuracy by enriching the extracted features with discriminative part-level details. However, they often overlook the fact that the set of support samples acts as a confounding variable, which hampers the FS-FGVC performance by introducing biased data distribution and misguiding the extraction of discriminative features. To address this issue, we propose a new causal FS-FGVC (CausalFSFG) approach inspired by causal inference for addressing biased data distributions through causal intervention. Specifically, based on the structural causal model (SCM), we argue that FS-FGVC infers the subcategories (i.e., effect) from the inputs (i.e., cause), whereas both the few-shot condition disturbance and the inherent fine-grained nature (i.e., large intra-class variance and small inter-class variance) lead to unobservable variables that bring spurious correlations, compromising the final classification performance. To further eliminate the spurious correlations, our CausalFSFG approach incorporates two key components: (1) Interventional multi-scale encoder (IMSE) conducts sample-level interventions, (2) Interventional masked feature reconstruction (IMFR) conducts feature-level interventions, which together reveal real causalities from inputs to subcategories. Extensive experiments and thorough analyses on the widely-used public datasets, including CUB-200-2011, Stanford Dogs, and Stanford Cars, demonstrate that our CausalFSFG achieves new state-of-the-art performance. The code is available at https://github.com/PKU-ICST-MIPL/CausalFSFG_TMM.
TAT: Task-Adaptive Transformer for All-in-One Medical Image Restoration
Dec 16, 2025Medical image restoration (MedIR) aims to recover high-quality medical images from their low-quality counterparts. Recent advancements in MedIR have focused on All-in-One models capable of simultaneously addressing multiple different MedIR tasks. However, due to significant differences in both modality and degradation types, using a shared model for these diverse tasks requires careful consideration of two critical inter-task relationships: task interference, which occurs when conflicting gradient update directions arise across tasks on the same parameter, and task imbalance, which refers to uneven optimization caused by varying learning difficulties inherent to each task. To address these challenges, we propose a task-adaptive Transformer (TAT), a novel framework that dynamically adapts to different tasks through two key innovations. First, a task-adaptive weight generation strategy is introduced to mitigate task interference by generating task-specific weight parameters for each task, thereby eliminating potential gradient conflicts on shared weight parameters. Second, a task-adaptive loss balancing strategy is introduced to dynamically adjust loss weights based on task-specific learning difficulties, preventing task domination or undertraining. Extensive experiments demonstrate that our proposed TAT achieves state-of-the-art performance in three MedIR tasks--PET synthesis, CT denoising, and MRI super-resolution--both in task-specific and All-in-One settings. Code is available at https://github.com/Yaziwel/TAT.
HD$^2$-SSC: High-Dimension High-Density Semantic Scene Completion for Autonomous Driving
Nov 13, 2025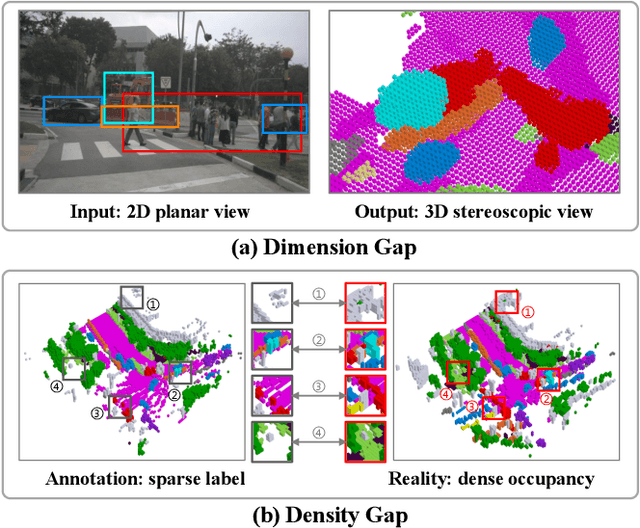
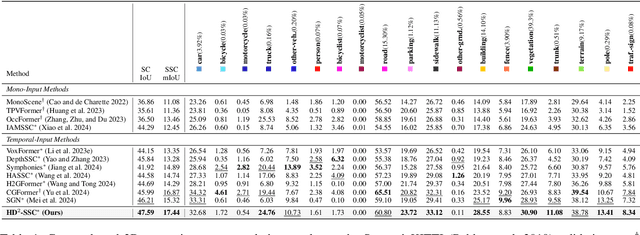
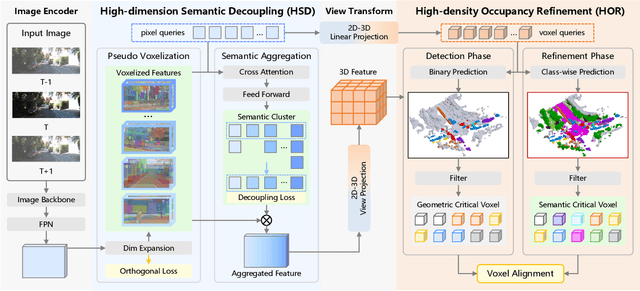
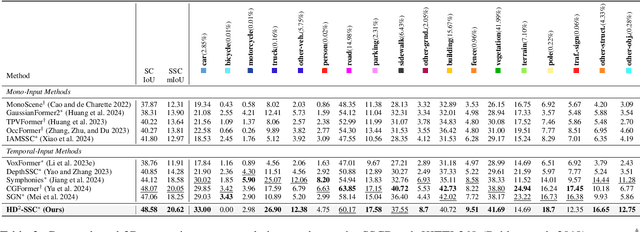
Camera-based 3D semantic scene completion (SSC) plays a crucial role in autonomous driving, enabling voxelized 3D scene understanding for effective scene perception and decision-making. Existing SSC methods have shown efficacy in improving 3D scene representations, but suffer from the inherent input-output dimension gap and annotation-reality density gap, where the 2D planner view from input images with sparse annotated labels leads to inferior prediction of real-world dense occupancy with a 3D stereoscopic view. In light of this, we propose the corresponding High-Dimension High-Density Semantic Scene Completion (HD$^2$-SSC) framework with expanded pixel semantics and refined voxel occupancies. To bridge the dimension gap, a High-dimension Semantic Decoupling module is designed to expand 2D image features along a pseudo third dimension, decoupling coarse pixel semantics from occlusions, and then identify focal regions with fine semantics to enrich image features. To mitigate the density gap, a High-density Occupancy Refinement module is devised with a "detect-and-refine" architecture to leverage contextual geometric and semantic structures for enhanced semantic density with the completion of missing voxels and correction of erroneous ones. Extensive experiments and analyses on the SemanticKITTI and SSCBench-KITTI-360 datasets validate the effectiveness of our HD$^2$-SSC framework.
FEAT: Full-Dimensional Efficient Attention Transformer for Medical Video Generation
Jun 05, 2025Synthesizing high-quality dynamic medical videos remains a significant challenge due to the need for modeling both spatial consistency and temporal dynamics. Existing Transformer-based approaches face critical limitations, including insufficient channel interactions, high computational complexity from self-attention, and coarse denoising guidance from timestep embeddings when handling varying noise levels. In this work, we propose FEAT, a full-dimensional efficient attention Transformer, which addresses these issues through three key innovations: (1) a unified paradigm with sequential spatial-temporal-channel attention mechanisms to capture global dependencies across all dimensions, (2) a linear-complexity design for attention mechanisms in each dimension, utilizing weighted key-value attention and global channel attention, and (3) a residual value guidance module that provides fine-grained pixel-level guidance to adapt to different noise levels. We evaluate FEAT on standard benchmarks and downstream tasks, demonstrating that FEAT-S, with only 23\% of the parameters of the state-of-the-art model Endora, achieves comparable or even superior performance. Furthermore, FEAT-L surpasses all comparison methods across multiple datasets, showcasing both superior effectiveness and scalability. Code is available at https://github.com/Yaziwel/FEAT.
Restore-RWKV: Efficient and Effective Medical Image Restoration with RWKV
Jul 14, 2024



Transformers have revolutionized medical image restoration, but the quadratic complexity still poses limitations for their application to high-resolution medical images. The recent advent of RWKV in the NLP field has attracted much attention as it can process long sequences efficiently. To leverage its advanced design, we propose Restore-RWKV, the first RWKV-based model for medical image restoration. Since the original RWKV model is designed for 1D sequences, we make two necessary modifications for modeling spatial relations in 2D images. First, we present a recurrent WKV (Re-WKV) attention mechanism that captures global dependencies with linear computational complexity. Re-WKV incorporates bidirectional attention as basic for a global receptive field and recurrent attention to effectively model 2D dependencies from various scan directions. Second, we develop an omnidirectional token shift (Omni-Shift) layer that enhances local dependencies by shifting tokens from all directions and across a wide context range. These adaptations make the proposed Restore-RWKV an efficient and effective model for medical image restoration. Extensive experiments demonstrate that Restore-RWKV achieves superior performance across various medical image restoration tasks, including MRI image super-resolution, CT image denoising, PET image synthesis, and all-in-one medical image restoration. Code is available at: \href{https://github.com/Yaziwel/Restore-RWKV.git}{https://github.com/Yaziwel/Restore-RWKV}.