 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmInspector: Combating Backdoor Attacks in Federated Self-Supervised Learning Through Embedding Inspection
May 21, 2024



Federated self-supervised learning (FSSL) has recently emerged as a promising paradigm that enables the exploitation of clients' vast amounts of unlabeled data while preserving data privacy. While FSSL offers advantages, its susceptibility to backdoor attacks, a concern identified in traditional federated supervised learning (FSL), has not been investigated. To fill the research gap, we undertake a comprehensive investigation into a backdoor attack paradigm, where unscrupulous clients conspire to manipulate the global model, revealing the vulnerability of FSSL to such attacks. In FSL, backdoor attacks typically build a direct association between the backdoor trigger and the target label. In contrast, in FSSL, backdoor attacks aim to alter the global model's representation for images containing the attacker's specified trigger pattern in favor of the attacker's intended target class, which is less straightforward. In this sense, we demonstrate that existing defenses are insufficient to mitigate the investigated backdoor attacks in FSSL, thus finding an effective defense mechanism is urgent. To tackle this issue, we dive into the fundamental mechanism of backdoor attacks on FSSL, proposing the Embedding Inspector (EmInspector) that detects malicious clients by inspecting the embedding space of local models. In particular, EmInspector assesses the similarity of embeddings from different local models using a small set of inspection images (e.g., ten images of CIFAR100) without specific requirements on sample distribution or labels. We discover that embeddings from backdoored models tend to cluster together in the embedding space for a given inspection image. Evaluation results show that EmInspector can effectively mitigate backdoor attacks on FSSL across various adversary settings. Our code is avaliable at https://github.com/ShuchiWu/EmInspector.
Refine, Discriminate and Align: Stealing Encoders via Sample-Wise Prototypes and Multi-Relational Extraction
Dec 01, 2023



This paper introduces RDA, a pioneering approach designed to address two primary deficiencies prevalent in previous endeavors aiming at stealing pre-trained encoders: (1) suboptimal performances attributed to biased optimization objectives, and (2) elevated query costs stemming from the end-to-end paradigm that necessitates querying the target encoder every epoch. Specifically, we initially Refine the representations of the target encoder for each training sample, thereby establishing a less biased optimization objective before the steal-training phase. This is accomplished via a sample-wise prototype, which consolidates the target encoder's representations for a given sample's various perspectives. Demanding exponentially fewer queries compared to the end-to-end approach, prototypes can be instantiated to guide subsequent query-free training. For more potent efficacy, we develop a multi-relational extraction loss that trains the surrogate encoder to Discriminate mismatched embedding-prototype pairs while Aligning those matched ones in terms of both amplitude and angle. In this way, the trained surrogate encoder achieves state-of-the-art results across the board in various downstream datasets with limited queries. Moreover, RDA is shown to be robust to multiple widely-used defenses.
Sparse Federated Training of Object Detection in the Internet of Vehicles
Sep 07, 2023
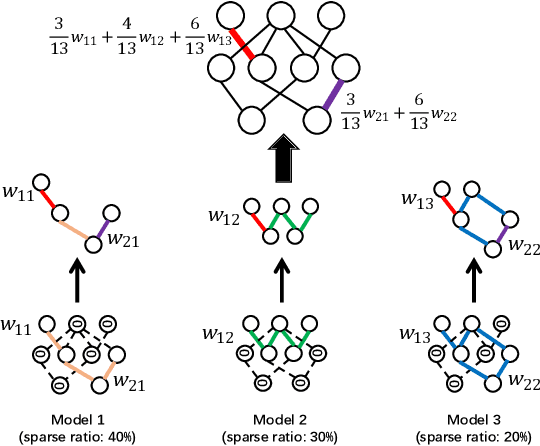


As an essential component part of the Intelligent Transportation System (ITS), the Internet of Vehicles (IoV) plays a vital role in alleviating traffic issues. Object detection is one of the key technologies in the IoV, which has been widely used to provide traffic management services by analyzing timely and sensitive vehicle-related information. However, the current object detection methods are mostly based on centralized deep training, that is, the sensitive data obtained by edge devices need to be uploaded to the server, which raises privacy concerns. To mitigate such privacy leakage, we first propose a federated learning-based framework, where well-trained local models are shared in the central server. However, since edge devices usually have limited computing power, plus a strict requirement of low latency in IoVs, we further propose a sparse training process on edge devices, which can effectively lighten the model, and ensure its training efficiency on edge devices, thereby reducing communication overheads. In addition, due to the diverse computing capabilities and dynamic environment, different sparsity rates are applied to edge devices. To further guarantee the performance, we propose, FedWeg, an improved aggregation scheme based on FedAvg, which is designed by the inverse ratio of sparsity rates. Experiments on the real-life dataset using YOLO show that the proposed scheme can achieve the required object detection rate while saving considerable communication costs.
Personalized Federated Deep Reinforcement Learning-based Trajectory Optimization for Multi-UAV Assisted Edge Computing
Sep 05, 2023In the era of 5G mobile communication, there has been a significant surge in research focused on unmanned aerial vehicles (UAVs) and mobile edge computing technology. UAVs can serve as intelligent servers in edge computing environments, optimizing their flight trajectories to maximize communication system throughput. Deep reinforcement learning (DRL)-based trajectory optimization algorithms may suffer from poor training performance due to intricate terrain features and inadequate training data. To overcome this limitation, some studies have proposed leveraging federated learning (FL) to mitigate the data isolation problem and expedite convergence. Nevertheless, the efficacy of global FL models can be negatively impacted by the high heterogeneity of local data, which could potentially impede the training process and even compromise the performance of local agents. This work proposes a novel solution to address these challenges, namely personalized federated deep reinforcement learning (PF-DRL), for multi-UAV trajectory optimization. PF-DRL aims to develop individualized models for each agent to address the data scarcity issue and mitigate the negative impact of data heterogeneity. Simulation results demonstrate that the proposed algorithm achieves superior training performance with faster convergence rates, and improves service quality compared to other DRL-based approaches.
Design of Two-Level Incentive Mechanisms for Hierarchical Federated Learning
Apr 09, 2023



Hierarchical Federated Learning (HFL) is a distributed machine learning paradigm tailored for multi-tiered computation architectures, which supports massive access of devices' models simultaneously. To enable efficient HFL, it is crucial to design suitable incentive mechanisms to ensure that devices actively participate in local training. However, there are few studies on incentive mechanism design for HFL. In this paper, we design two-level incentive mechanisms for the HFL with a two-tiered computing structure to encourage the participation of entities in each tier in the HFL training. In the lower-level game, we propose a coalition formation game to joint optimize the edge association and bandwidth allocation problem, and obtain efficient coalition partitions by the proposed preference rule, which can be proven to be stable by exact potential game. In the upper-level game, we design the Stackelberg game algorithm, which not only determines the optimal number of edge aggregations for edge servers to maximize their utility, but also optimize the unit reward provided for the edge aggregation performance to ensure the interests of cloud servers. Furthermore, numerical results indicate that the proposed algorithms can achieve better performance than the benchmark schemes.
Efficient and Low Overhead Website Fingerprinting Attacks and Defenses based on TCP/IP Traffic
Feb 27, 2023



Website fingerprinting attack is an extensively studied technique used in a web browser to analyze traffic patterns and thus infer confidential information about users. Several website fingerprinting attacks based on machine learning and deep learning tend to use the most typical features to achieve a satisfactory performance of attacking rate. However, these attacks suffer from several practical implementation factors, such as a skillfully pre-processing step or a clean dataset. To defend against such attacks, random packet defense (RPD) with a high cost of excessive network overhead is usually applied. In this work, we first propose a practical filter-assisted attack against RPD, which can filter out the injected noises using the statistical characteristics of TCP/IP traffic. Then, we propose a list-assisted defensive mechanism to defend the proposed attack method. To achieve a configurable trade-off between the defense and the network overhead, we further improve the list-based defense by a traffic splitting mechanism, which can combat the mentioned attacks as well as save a considerable amount of network overhead. In the experiments, we collect real-life traffic patterns using three mainstream browsers, i.e., Microsoft Edge, Google Chrome, and Mozilla Firefox, and extensive results conducted on the closed and open-world datasets show the effectiveness of the proposed algorithms in terms of defense accuracy and network efficiency.
Path Planning for the Dynamic UAV-Aided Wireless Systems using Monte Carlo Tree Search
Jan 13, 2022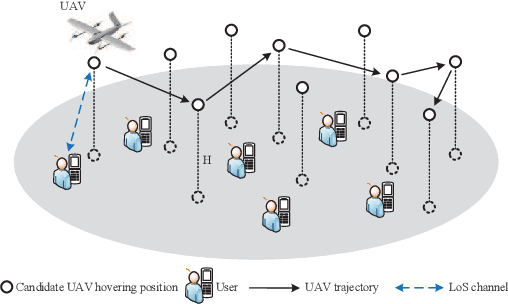
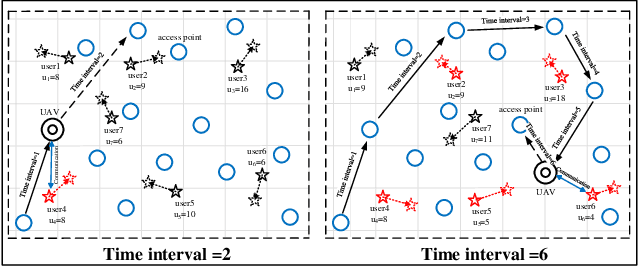
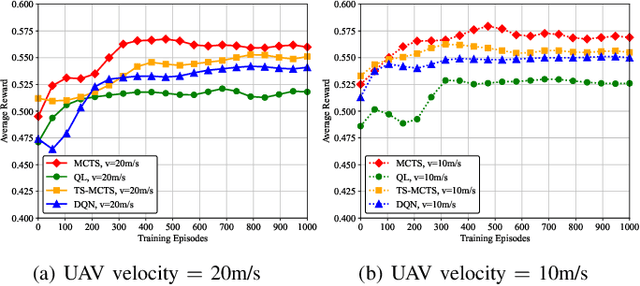
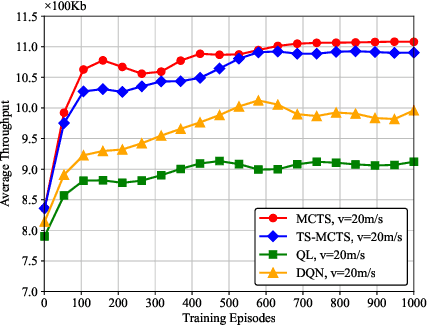
For UAV-aided wireless systems, online path planning attracts much attention recently. To better adapt to the real-time dynamic environment, we, for the first time, propose a Monte Carlo Tree Search (MCTS)-based path planning scheme. In details, we consider a single UAV acts as a mobile server to provide computation tasks offloading services for a set of mobile users on the ground, where the movement of ground users follows a Random Way Point model. Our model aims at maximizing the average throughput under energy consumption and user fairness constraints, and the proposed timesaving MCTS algorithm can further improve the performance. Simulation results show that the proposed algorithm achieves a larger average throughput and a faster convergence performance compared with the baseline algorithms of Q-learning and Deep Q-Network.