 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Distributed Multi-UGV Exploration Framework With Loop-Aware Planning and Descriptor-Aided Localization in Resource-Limited Environments
Jun 09, 2026Robust and efficient cooperative exploration with multiple unmanned ground vehicles (UGVs) in unknown, GPSdenied, and bandwidth-limited environments without prior maps remains challenging, as localization drift degrades map consistency and induces redundant coverage. This paper presents a fully distributed exploration framework that couples descriptoraided inter-UGV loop closure with loop-aware hierarchical planning while enabling autonomous localization and exploration. We develop a lightweight LiDAR global descriptor with range-image prealignment to enable robust cross-UGV place recognition under large yaw and lateral variations, and use verified loop closures to maintain globally consistent trajectories and a sparse topological representation. We further introduce an uncertainty-aware crossUGV loop-closure selection module that scores candidate loop closures under pose uncertainty and retains high-utility loop closures as planning anchors for global task allocation and local route refinement. Simulations and real-UGV experiments show that the loop-closure module achieves AR@1/AR@1% of 89.9%/95.5%, distributed optimization reduces absolute trajectory error, the system substantially reduces two-way communication volume, and the overall framework reduces exploration time and travel distance by 15% and 14%, respectively, compared with an mTSP baseline.
SynLlama: Generating Synthesizable Molecules and Their Analogs with Large Language Models
Mar 16, 2025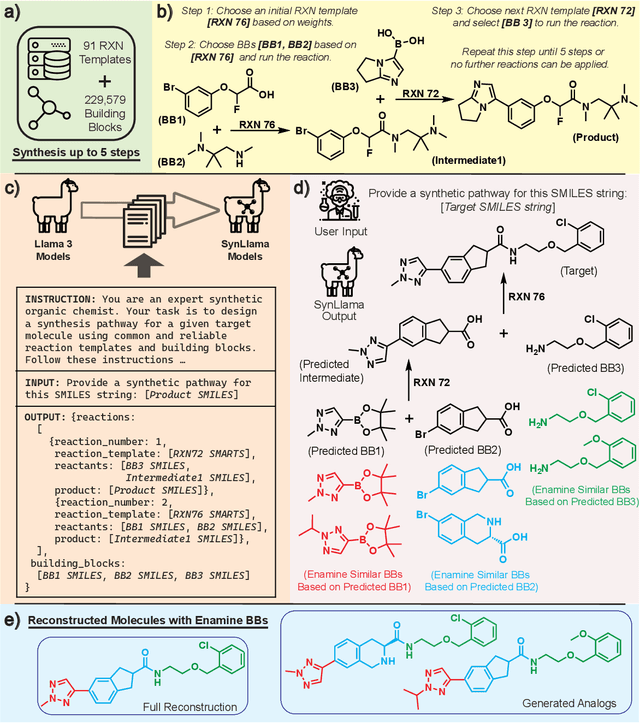
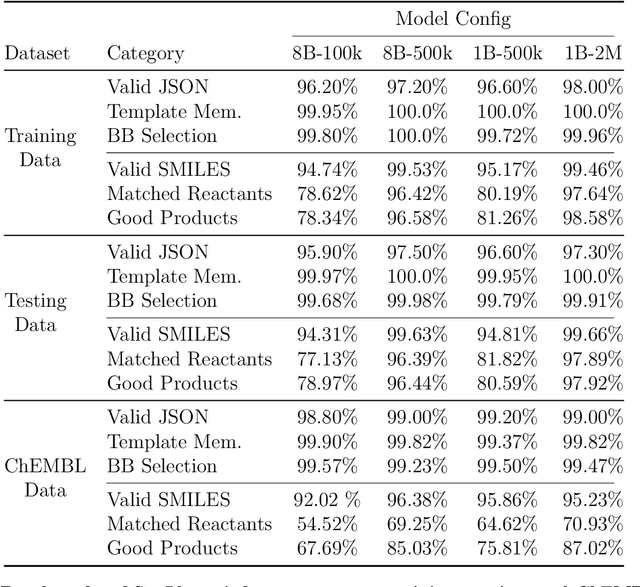
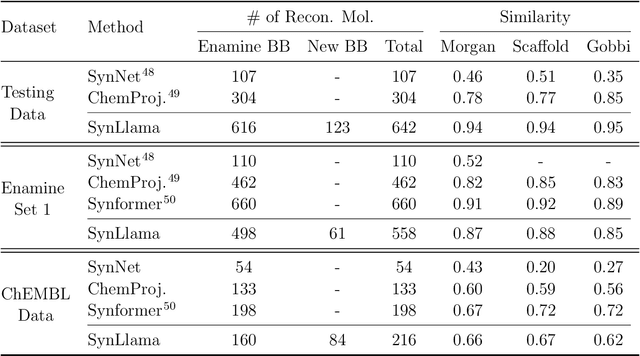
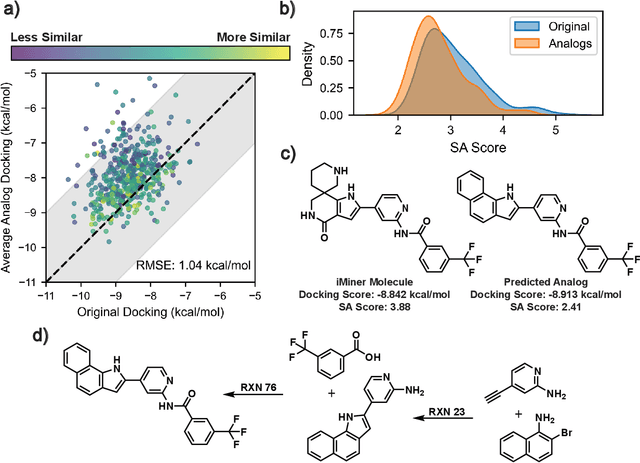
Generative machine learning models for small molecule drug discovery have shown immense promise, but many molecules generated by this approach are too difficult to synthesize to be worth further investigation or further development. We present a novel approach by fine-tuning Meta's Llama3 large language models (LLMs) to create SynLlama, which generates full synthetic pathways made of commonly accessible Enamine building blocks and robust organic reaction templates. SynLlama explores a large synthesizable space using significantly less data compared to other state-of-the-art methods, and offers strong performance in bottom-up synthesis, synthesizable analog generation, and hit expansion, offering medicinal chemists a valuable tool for drug discovery developments. We find that SynLlama can effectively generalize to unseen yet purchasable building blocks, meaning that its reconstruction capabilities extend to a broader synthesizable chemical space than the training data.
UAV-Aided Lifelong Learning for AoI and Energy Optimization in Non-Stationary IoT Networks
Dec 01, 2023



In this paper, a novel joint energy and age of information (AoI) optimization framework for IoT devices in a non-stationary environment is presented. In particular, IoT devices that are distributed in the real-world are required to efficiently utilize their computing resources so as to balance the freshness of their data and their energy consumption. To optimize the performance of IoT devices in such a dynamic setting, a novel lifelong reinforcement learning (RL) solution that enables IoT devices to continuously adapt their policies to each newly encountered environment is proposed. Given that IoT devices have limited energy and computing resources, an unmanned aerial vehicle (UAV) is leveraged to visit the IoT devices and update the policy of each device sequentially. As such, the UAV is exploited as a mobile learning agent that can learn a shared knowledge base with a feature base in its training phase, and feature sets of a zero-shot learning method in its testing phase, to generalize between the environments. To optimize the trajectory and flying velocity of the UAV, an actor-critic network is leveraged so as to minimize the UAV energy consumption. Simulation results show that the proposed lifelong RL solution can outperform the state-of-art benchmarks by enhancing the balanced cost of IoT devices by $8.3\%$ when incorporating warm-start policies for unseen environments. In addition, our solution achieves up to $49.38\%$ reduction in terms of energy consumption by the UAV in comparison to the random flying strategy.
Improving Molecular Pretraining with Complementary Featurizations
Sep 29, 2022
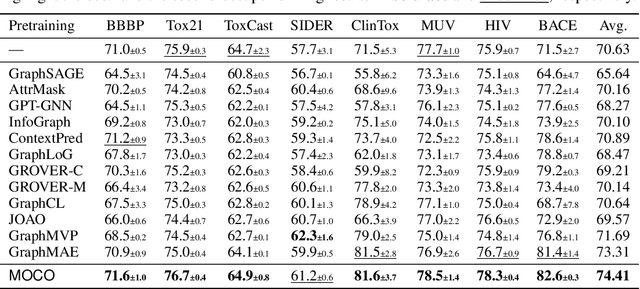
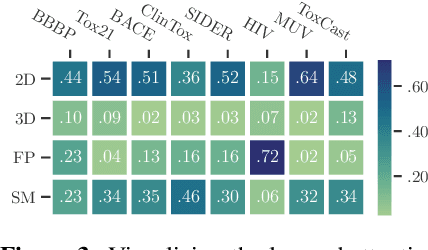
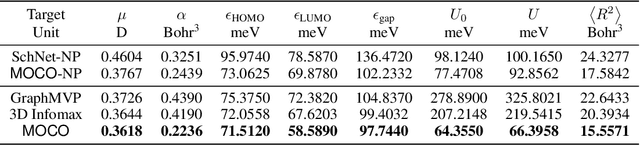
Molecular pretraining, which learns molecular representations over massive unlabeled data, has become a prominent paradigm to solve a variety of tasks in computational chemistry and drug discovery. Recently, prosperous progress has been made in molecular pretraining with different molecular featurizations, including 1D SMILES strings, 2D graphs, and 3D geometries. However, the role of molecular featurizations with their corresponding neural architectures in molecular pretraining remains largely unexamined. In this paper, through two case studies -- chirality classification and aromatic ring counting -- we first demonstrate that different featurization techniques convey chemical information differently. In light of this observation, we propose a simple and effective MOlecular pretraining framework with COmplementary featurizations (MOCO). MOCO comprehensively leverages multiple featurizations that complement each other and outperforms existing state-of-the-art models that solely relies on one or two featurizations on a wide range of molecular property prediction tasks.