 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUltraStar: Semantic-Aware Star Graph Modeling for Echocardiography Navigation
Mar 02, 2026Echocardiography is critical for diagnosing cardiovascular diseases, yet the shortage of skilled sonographers hinders timely patient care, due to high operational difficulties. Consequently, research on automated probe navigation has significant clinical potential. To achieve robust navigation, it is essential to leverage historical scanning information, mimicking how experts rely on past feedback to adjust subsequent maneuvers. Practical scanning data collected from sonographers typically consists of noisy trajectories inherently generated through trial-and-error exploration. However, existing methods typically model this history as a sequential chain, forcing models to overfit these noisy paths, leading to performance degradation on long sequences. In this paper, we propose UltraStar, which reformulates probe navigation from path regression to anchor-based global localization. By establishing a Star Graph, UltraStar treats historical keyframes as spatial anchors connected directly to the current view, explicitly modeling geometric constraints for precise positioning. We further enhance the Star Graph with a semantic-aware sampling strategy that actively selects the representative landmarks from massive history logs, reducing redundancy for accurate anchoring. Extensive experiments on a dataset with over 1.31 million samples demonstrate that UltraStar outperforms baselines and scales better with longer input lengths, revealing a more effective topology for history modeling under noisy exploration.
OpenVox: Real-time Instance-level Open-vocabulary Probabilistic Voxel Representation
Feb 23, 2025In recent years, vision-language models (VLMs) have advanced open-vocabulary mapping, enabling mobile robots to simultaneously achieve environmental reconstruction and high-level semantic understanding. While integrated object cognition helps mitigate semantic ambiguity in point-wise feature maps, efficiently obtaining rich semantic understanding and robust incremental reconstruction at the instance-level remains challenging. To address these challenges, we introduce OpenVox, a real-time incremental open-vocabulary probabilistic instance voxel representation. In the front-end, we design an efficient instance segmentation and comprehension pipeline that enhances language reasoning through encoding captions. In the back-end, we implement probabilistic instance voxels and formulate the cross-frame incremental fusion process into two subtasks: instance association and live map evolution, ensuring robustness to sensor and segmentation noise. Extensive evaluations across multiple datasets demonstrate that OpenVox achieves state-of-the-art performance in zero-shot instance segmentation, semantic segmentation, and open-vocabulary retrieval. Furthermore, real-world robotics experiments validate OpenVox's capability for stable, real-time operation.
Multi-objective Feature Selection with Missing Data in Classification
Apr 18, 2021
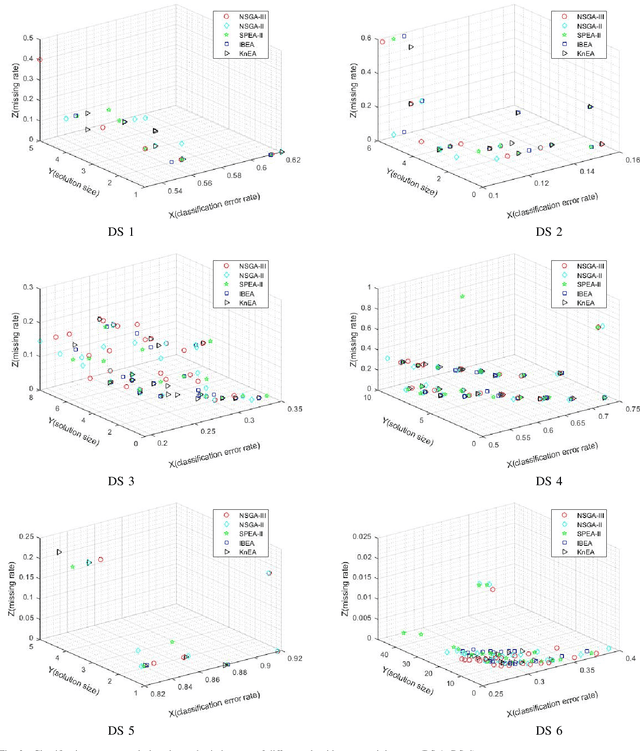

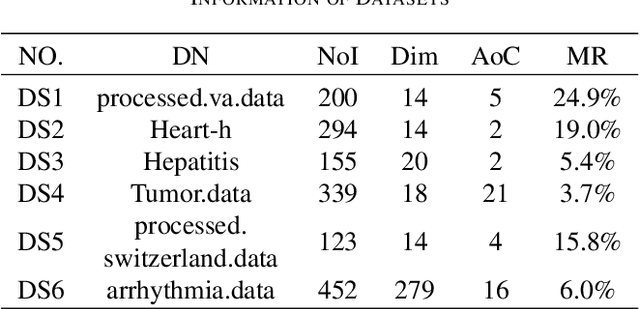
Feature selection (FS) is an important research topic in machine learning. Usually, FS is modelled as a+ bi-objective optimization problem whose objectives are: 1) classification accuracy; 2) number of features. One of the main issues in real-world applications is missing data. Databases with missing data are likely to be unreliable. Thus, FS performed on a data set missing some data is also unreliable. In order to directly control this issue plaguing the field, we propose in this study a novel modelling of FS: we include reliability as the third objective of the problem. In order to address the modified problem, we propose the application of the non-dominated sorting genetic algorithm-III (NSGA-III). We selected six incomplete data sets from the University of California Irvine (UCI) machine learning repository. We used the mean imputation method to deal with the missing data. In the experiments, k-nearest neighbors (K-NN) is used as the classifier to evaluate the feature subsets. Experimental results show that the proposed three-objective model coupled with NSGA-III efficiently addresses the FS problem for the six data sets included in this study.