 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust localization for planar moving robot in changing environment: A perspective on density of correspondence and depth
Nov 01, 2020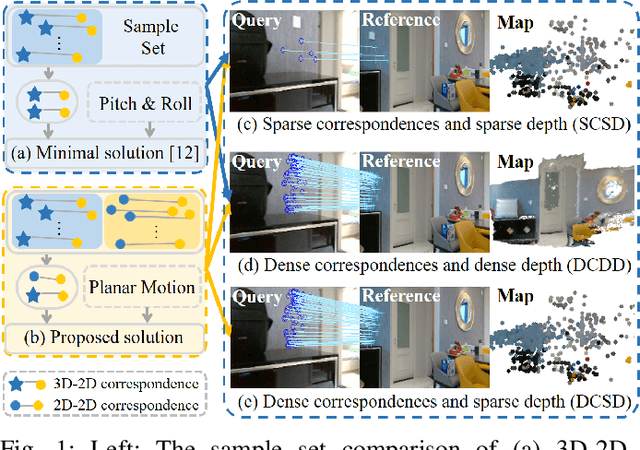
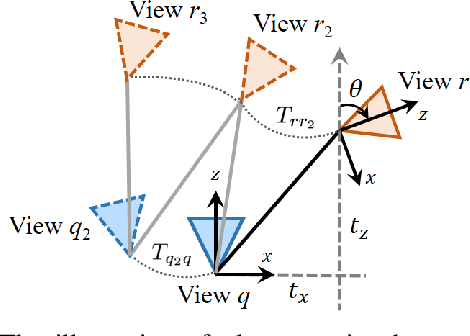
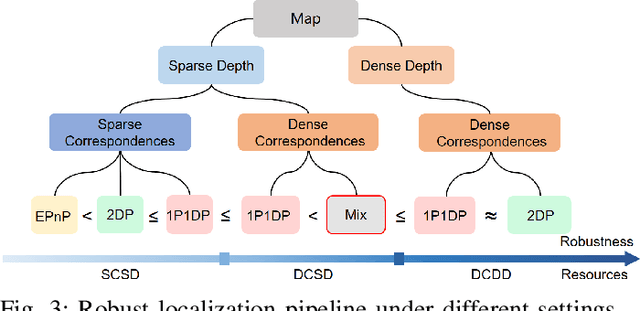
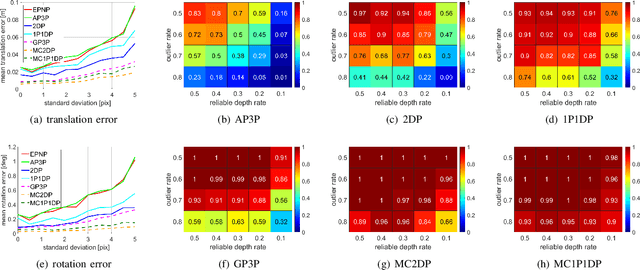
Visual localization for planar moving robot is important to various indoor service robotic applications. To handle the textureless areas and frequent human activities in indoor environments, a novel robust visual localization algorithm which leverages dense correspondence and sparse depth for planar moving robot is proposed. The key component is a minimal solution which computes the absolute camera pose with one 3D-2D correspondence and one 2D-2D correspondence. The advantages are obvious in two aspects. First, the robustness is enhanced as the sample set for pose estimation is maximal by utilizing all correspondences with or without depth. Second, no extra effort for dense map construction is required to exploit dense correspondences for handling textureless and repetitive texture scenes. That is meaningful as building a dense map is computational expensive especially in large scale. Moreover, a probabilistic analysis among different solutions is presented and an automatic solution selection mechanism is designed to maximize the success rate by selecting appropriate solutions in different environmental characteristics. Finally, a complete visual localization pipeline considering situations from the perspective of correspondence and depth density is summarized and validated on both simulation and public real-world indoor localization dataset. The code is released on github.
Improving the generalization of network based relative pose regression: dimension reduction as a regularizer
Oct 24, 2020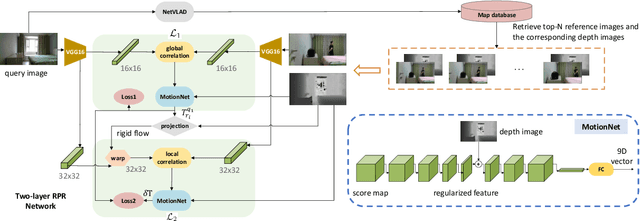
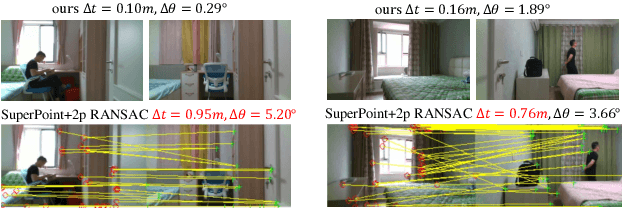
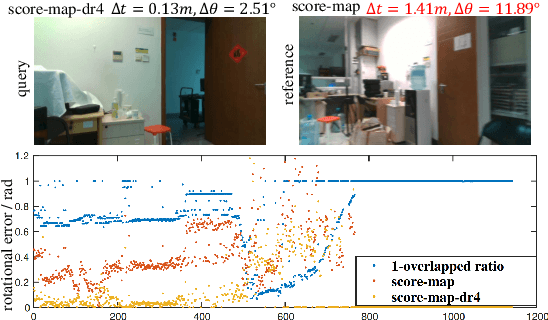
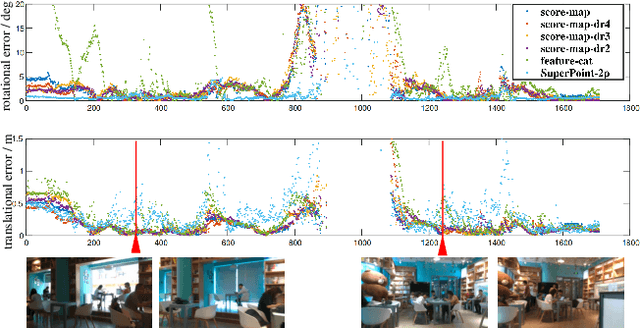
Visual localization occupies an important position in many areas such as Augmented Reality, robotics and 3D reconstruction. The state-of-the-art visual localization methods perform pose estimation using geometry based solver within the RANSAC framework. However, these methods require accurate pixel-level matching at high image resolution, which is hard to satisfy under significant changes from appearance, dynamics or perspective of view. End-to-end learning based regression networks provide a solution to circumvent the requirement for precise pixel-level correspondences, but demonstrate poor performance towards cross-scene generalization. In this paper, we explicitly add a learnable matching layer within the network to isolate the pose regression solver from the absolute image feature values, and apply dimension regularization on both the correlation feature channel and the image scale to further improve performance towards generalization and large viewpoint change. We implement this dimension regularization strategy within a two-layer pyramid based framework to regress the localization results from coarse to fine. In addition, the depth information is fused for absolute translational scale recovery. Through experiments on real world RGBD datasets we validate the effectiveness of our design in terms of improving both generalization performance and robustness towards viewpoint change, and also show the potential of regression based visual localization networks towards challenging occasions that are difficult for geometry based visual localization methods.
A Samplable Multimodal Observation Model for Global Localization and Kidnapping
Sep 01, 2020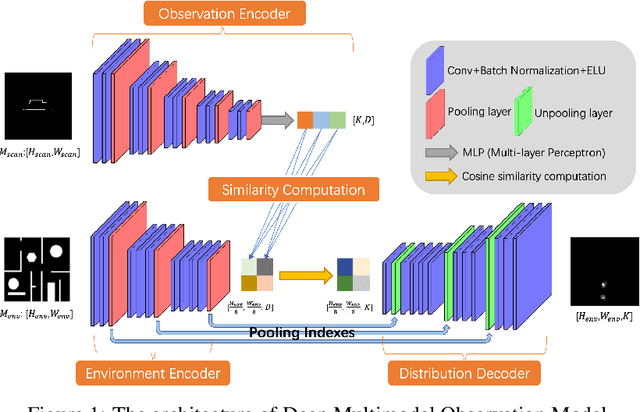

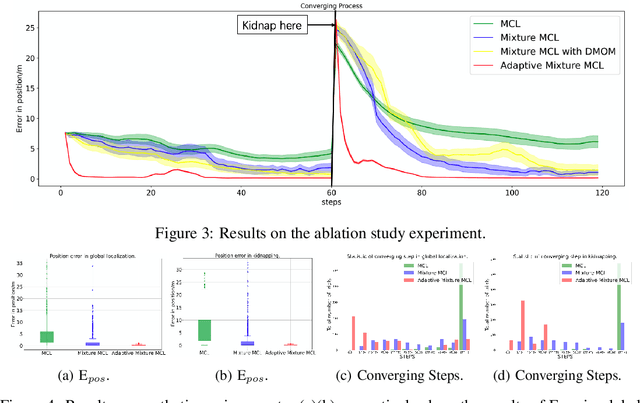
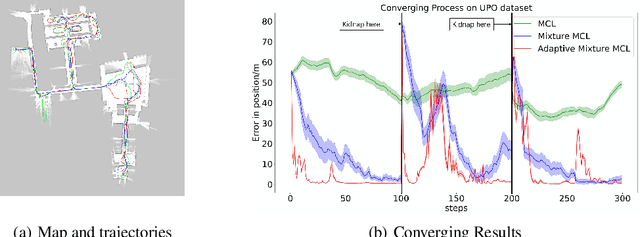
Global localization and kidnapping are two challenging problems in robot localization. The popular method, Monte Carlo Localization (MCL) addresses the problem by sampling uniformly over the state space, which is unfortunately inefficient when the environment is large. To better deal with the the problems, we present a proposal model, named Deep Multimodal Observation Model (DMOM). DMOM takes a map and a 2D laser scan as inputs and outputs a conditional multimodal probability distribution of the pose, making the samples more focusing on the regions with higher likelihood. With such samples, the convergence is expected to be much efficient. Considering that learning based Samplable Observation Model may fail to capture the true pose sometimes, we furthermore propose the Adaptive Mixture MCL, which adaptively selects updating mode for each particle to tolerate this situation. Equipped with DMOM, Adaptive Mixture MCL can achieve more accurate estimation, faster convergence and better scalability compared with previous methods in both synthetic and real scenes. Even in real environment with long-term changing, Adaptive Mixture MCL is able to localize the robot using DMON trained only on simulated observations from a SLAM map, or even a blueprint map.
Globally optimal consensus maximization for robust visual inertial localization in point and line map
Mar 25, 2020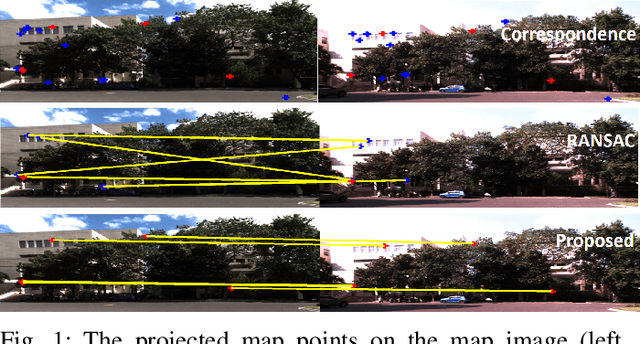
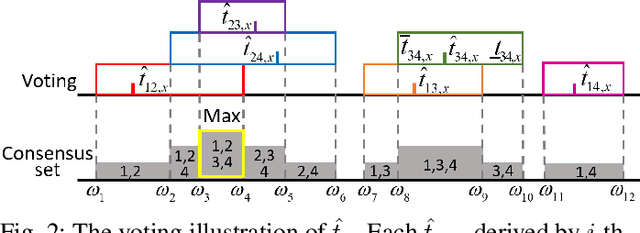
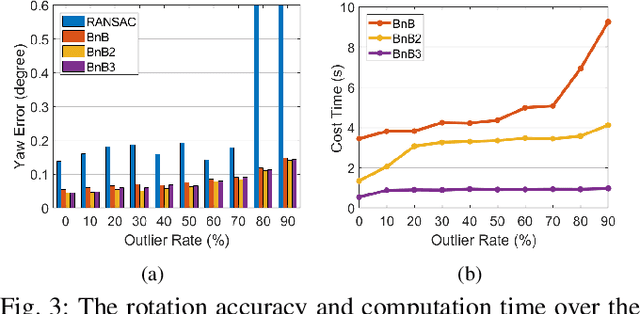
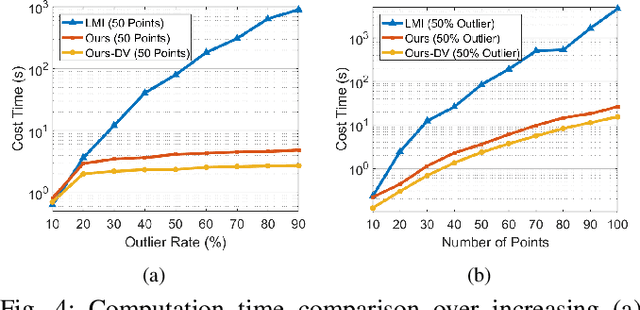
Map based visual inertial localization is a crucial step to reduce the drift in state estimation of mobile robots. The underlying problem for localization is to estimate the pose from a set of 3D-2D feature correspondences, of which the main challenge is the presence of outliers, especially in changing environment. In this paper, we propose a robust solution based on efficient global optimization of the consensus maximization problem, which is insensitive to high percentage of outliers. We first introduce translation invariant measurements (TIMs) for both points and lines to decouple the consensus maximization problem into rotation and translation subproblems, allowing for a two-stage solver with reduced solution dimensions. Then we show that (i) the rotation can be calculated by minimizing TIMs using only 1-dimensional branch-and-bound (BnB), (ii) the translation can be found by running 1-dimensional search for three times with prioritized progressive voting. Compared with the popular randomized solver, our solver achieves deterministic global convergence without depending on an initial value. While compared with existing BnB based methods, ours is exponentially faster. Finally, by evaluating the performance on both simulation and real-world datasets, our approach gives accurate pose even when there are 90\% outliers (only 2 inliers).
Spatiotemporal Decoupling Based LiDAR-Camera Calibration under Arbitrary Configurations
Mar 14, 2019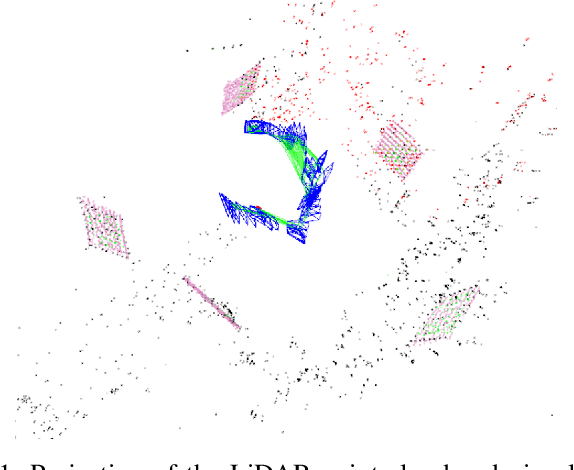
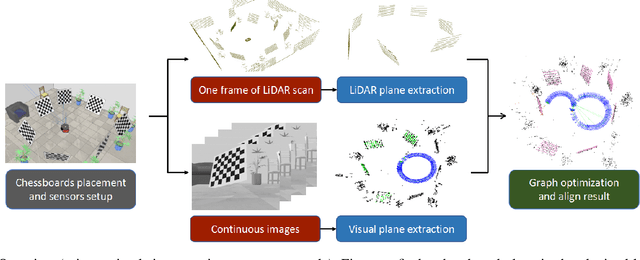
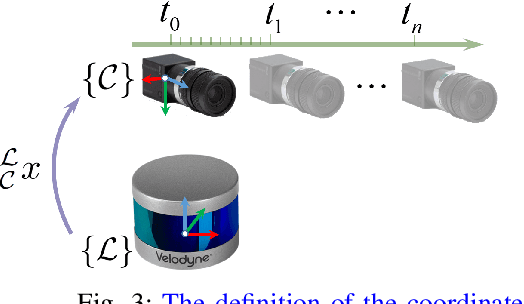
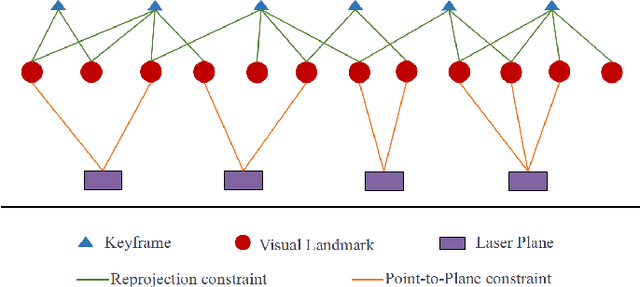
LiDAR-camera calibration is a precondition for many heterogeneous systems that fuse data from LiDAR and camera. However, the constraint from the common field of view and the requirement for strict time synchronization make the calibration a challenging problem. In this paper, we propose a hybrid LiDAR-camera calibration method aiming to solve these two difficulties. The configuration between LiDAR and camera is free from their common field of view as we move the camera to cover the scenario observed by LiDAR. 3D visual reconstruction of the environment can be achieved from the sequential visual images obtained by the moving camera, which later can be aligned with the single 3D laser scan captured when both the scene and the equipment are stationary. Under this design, our method can further get rid of the influence from time synchronization between LiDAR and camera. Moreover, the extended field of view obtained by the moving camera can improve the calibration accuracy. We derive the conditions of minimal observability for our method and discuss the influence on calibration accuracy from different placements of chessboards, which can be utilized as a guideline for designing high-accuracy calibration procedures. We validate our method on both simulation platform and real-world datasets. Experiments show that our method can achieve higher accuracy than other comparable methods.
2-Entity RANSAC for robust visual localization in changing environment
Mar 10, 2019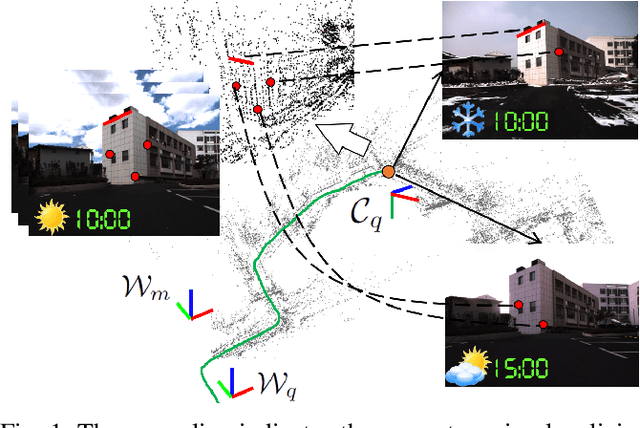
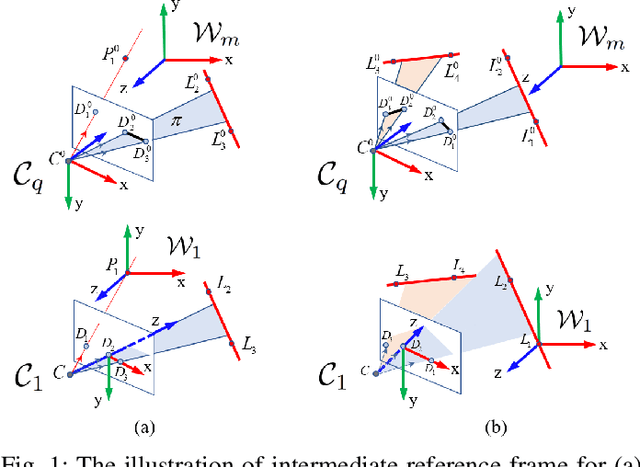
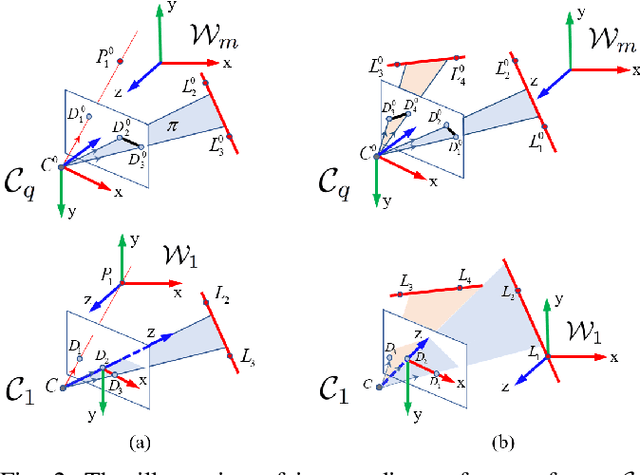
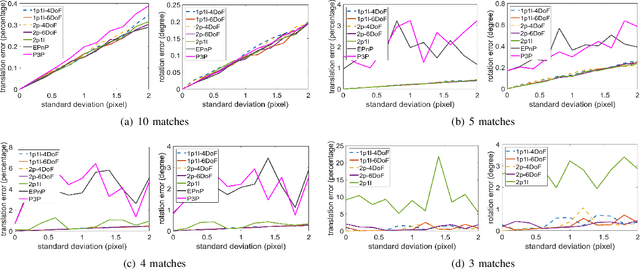
Visual localization has attracted considerable attention due to its low-cost and stable sensor, which is desired in many applications, such as autonomous driving, inspection robots and unmanned aerial vehicles. However, current visual localization methods still struggle with environmental changes across weathers and seasons, as there is significant appearance variation between the map and the query image. The crucial challenge in this situation is that the percentage of outliers, i.e. incorrect feature matches, is high. In this paper, we derive minimal closed form solutions for 3D-2D localization with the aid of inertial measurements, using only 2 pairs of point matches or 1 pair of point match and 1 pair of line match. These solutions are further utilized in the proposed 2-entity RANSAC, which is more robust to outliers as both line and point features can be used simultaneously and the number of matches required for pose calculation is reduced. Furthermore, we introduce three feature sampling strategies with different advantages, enabling an automatic selection mechanism. With the mechanism, our 2-entity RANSAC can be adaptive to the environments with different distribution of feature types in different segments. Finally, we evaluate the method on both synthetic and real-world datasets, validating its performance and effectiveness in inter-session scenarios.