 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Control of a Perching Drone Inspired by the Prey-Capturing Mechanism of Venus Flytrap
Sep 16, 2025
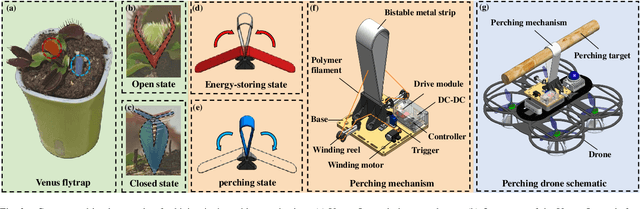
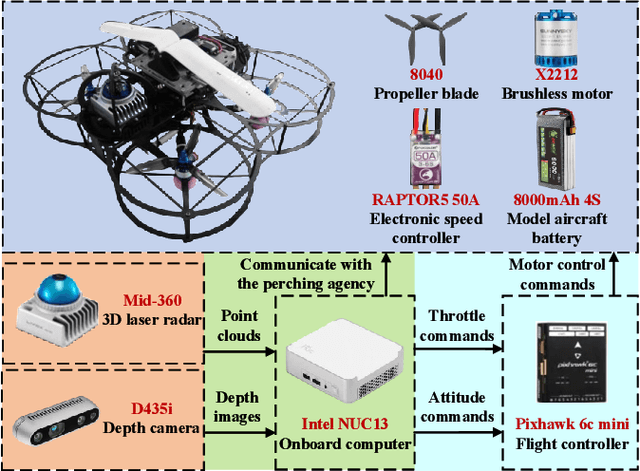
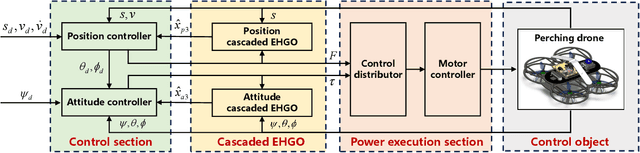
The endurance and energy efficiency of drones remain critical challenges in their design and operation. To extend mission duration, numerous studies explored perching mechanisms that enable drones to conserve energy by temporarily suspending flight. This paper presents a new perching drone that utilizes an active flexible perching mechanism inspired by the rapid predation mechanism of the Venus flytrap, achieving perching in less than 100 ms. The proposed system is designed for high-speed adaptability to the perching targets. The overall drone design is outlined, followed by the development and validation of the biomimetic perching structure. To enhance the system stability, a cascade extended high-gain observer (EHGO) based control method is developed, which can estimate and compensate for the external disturbance in real time. The experimental results demonstrate the adaptability of the perching structure and the superiority of the cascaded EHGO in resisting wind and perching disturbances.
A Microgravity Simulation Experimental Platform For Small Space Robots In Orbit
Apr 26, 2025This study describes the development and validation of a novel microgravity experimental platform that is mainly applied to small robots such as modular self-reconfigurable robots. This platform mainly consists of an air supply system, a microporous platform and glass. By supplying air to the microporous platform to form an air film, the influence of the weight of the air foot and the ventilation hose of traditional air-float platforms on microgravity experiments is solved. The contribution of this work is to provide a platform with less external interference for microgravity simulation experiments on small robots.