 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Control of a Perching Drone Inspired by the Prey-Capturing Mechanism of Venus Flytrap
Sep 16, 2025
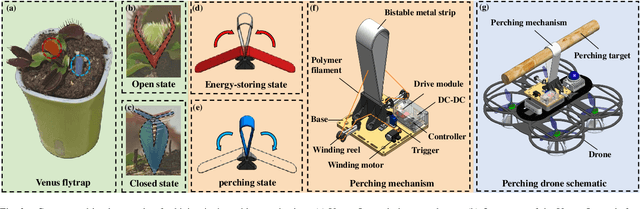
The endurance and energy efficiency of drones remain critical challenges in their design and operation. To extend mission duration, numerous studies explored perching mechanisms that enable drones to conserve energy by temporarily suspending flight. This paper presents a new perching drone that utilizes an active flexible perching mechanism inspired by the rapid predation mechanism of the Venus flytrap, achieving perching in less than 100 ms. The proposed system is designed for high-speed adaptability to the perching targets. The overall drone design is outlined, followed by the development and validation of the biomimetic perching structure. To enhance the system stability, a cascade extended high-gain observer (EHGO) based control method is developed, which can estimate and compensate for the external disturbance in real time. The experimental results demonstrate the adaptability of the perching structure and the superiority of the cascaded EHGO in resisting wind and perching disturbances.
PL-UNeXt: Per-stage Edge Detail and Line Feature Guided Segmentation for Power Line Detection
Mar 08, 2023



Power line detection is a critical inspection task for electricity companies and is also useful in avoiding drone obstacles. Accurately separating power lines from the surrounding area in the aerial image is still challenging due to the intricate background and low pixel ratio. In order to properly capture the guidance of the spatial edge detail prior and line features, we offer PL-UNeXt, a power line segmentation model with a booster training strategy. We design edge detail heads computing the loss in edge space to guide the lower-level detail learning and line feature heads generating auxiliary segmentation masks to supervise higher-level line feature learning. Benefited from this design, our model can reach 70.6 F1 score (+1.9%) on TTPLA and 68.41 mIoU (+5.2%) on VITL (without utilizing IR images), while preserving a real-time performance due to few inference parameters.