 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Self-Evolving Agentic System for Automated Generation and Execution of Biological Protocols
Jun 30, 2026Autonomous wet-lab experimentation requires more than plausible protocol text: biological intent, quantitative procedures, device constraints and experimental feedback must remain aligned from protocol and SOP design to code and physical execution. We developed ProtoPilot, a self-evolving multi-agent system, together with an expert-grounded benchmark and evaluation framework for testing this conversion as an experimental automation problem. The framework spans 294 synthetic-biology and molecular-biology tasks derived from 98 gold-standard protocols, wet-lab expert rubrics, device-level validity gates and real experimental tests. ProtoPilot incorporates layer-wise verifiability, multi-agent orchestration and a runtime-updated skill library to generate protocols, expand SOPs, synthesize SDK-compliant code and revise workflows from wet-lab feedback. It achieved a Top@3 expert-preference rate of 90.2%, an overall protocol-to-code gate pass rate of 89.5% and an Opentrons pass rate of 88.24%, compared with 32.35% for OpenTrons-AI. Wet-lab validation produced interpretable readouts, Sanger-confirmed products and feedback-corrected PCA-assembled DNA targets, establishing a verifiable route to autonomous experimentation. Together, these results show that the evaluation framework captures execution-relevant requirements for autonomous wet-lab automation, and that ProtoPilot can meet them by converting protocol and code generation into validated execution and feedback-guided revision.
InternAgent-1.5: A Unified Agentic Framework for Long-Horizon Autonomous Scientific Discovery
Feb 09, 2026We introduce InternAgent-1.5, a unified system designed for end-to-end scientific discovery across computational and empirical domains. The system is built on a structured architecture composed of three coordinated subsystems for generation, verification, and evolution. These subsystems are supported by foundational capabilities for deep research, solution optimization, and long horizon memory. The architecture allows InternAgent-1.5 to operate continuously across extended discovery cycles while maintaining coherent and improving behavior. It also enables the system to coordinate computational modeling and laboratory experimentation within a single unified system. We evaluate InternAgent-1.5 on scientific reasoning benchmarks such as GAIA, HLE, GPQA, and FrontierScience, and the system achieves leading performance that demonstrates strong foundational capabilities. Beyond these benchmarks, we further assess two categories of discovery tasks. In algorithm discovery tasks, InternAgent-1.5 autonomously designs competitive methods for core machine learning problems. In empirical discovery tasks, it executes complete computational or wet lab experiments and produces scientific findings in earth, life, biological, and physical domains. Overall, these results show that InternAgent-1.5 provides a general and scalable framework for autonomous scientific discovery.
Beyond Static Tools: Test-Time Tool Evolution for Scientific Reasoning
Jan 12, 2026The central challenge of AI for Science is not reasoning alone, but the ability to create computational methods in an open-ended scientific world. Existing LLM-based agents rely on static, pre-defined tool libraries, a paradigm that fundamentally fails in scientific domains where tools are sparse, heterogeneous, and intrinsically incomplete. In this paper, we propose Test-Time Tool Evolution (TTE), a new paradigm that enables agents to synthesize, verify, and evolve executable tools during inference. By transforming tools from fixed resources into problem-driven artifacts, TTE overcomes the rigidity and long-tail limitations of static tool libraries. To facilitate rigorous evaluation, we introduce SciEvo, a benchmark comprising 1,590 scientific reasoning tasks supported by 925 automatically evolved tools. Extensive experiments show that TTE achieves state-of-the-art performance in both accuracy and tool efficiency, while enabling effective cross-domain adaptation of computational tools. The code and benchmark have been released at https://github.com/lujiaxuan0520/Test-Time-Tool-Evol.
SCP: Accelerating Discovery with a Global Web of Autonomous Scientific Agents
Dec 30, 2025We introduce SCP: the Science Context Protocol, an open-source standard designed to accelerate discovery by enabling a global network of autonomous scientific agents. SCP is built on two foundational pillars: (1) Unified Resource Integration: At its core, SCP provides a universal specification for describing and invoking scientific resources, spanning software tools, models, datasets, and physical instruments. This protocol-level standardization enables AI agents and applications to discover, call, and compose capabilities seamlessly across disparate platforms and institutional boundaries. (2) Orchestrated Experiment Lifecycle Management: SCP complements the protocol with a secure service architecture, which comprises a centralized SCP Hub and federated SCP Servers. This architecture manages the complete experiment lifecycle (registration, planning, execution, monitoring, and archival), enforces fine-grained authentication and authorization, and orchestrates traceable, end-to-end workflows that bridge computational and physical laboratories. Based on SCP, we have constructed a scientific discovery platform that offers researchers and agents a large-scale ecosystem of more than 1,600 tool resources. Across diverse use cases, SCP facilitates secure, large-scale collaboration between heterogeneous AI systems and human researchers while significantly reducing integration overhead and enhancing reproducibility. By standardizing scientific context and tool orchestration at the protocol level, SCP establishes essential infrastructure for scalable, multi-institution, agent-driven science.
Autonomous quadrotor obstacle avoidance based on dueling double deep recurrent Q-learning with monocular vision
Mar 02, 2020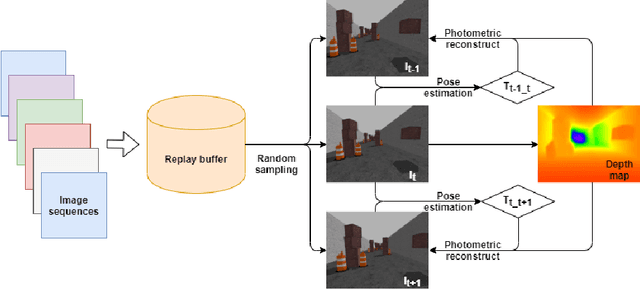
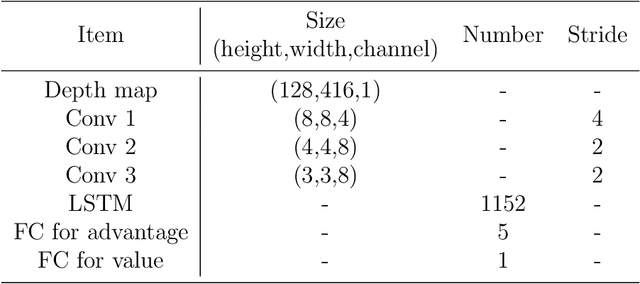
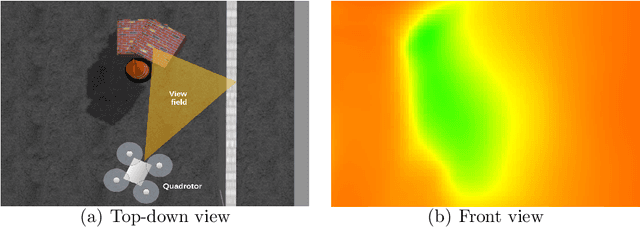
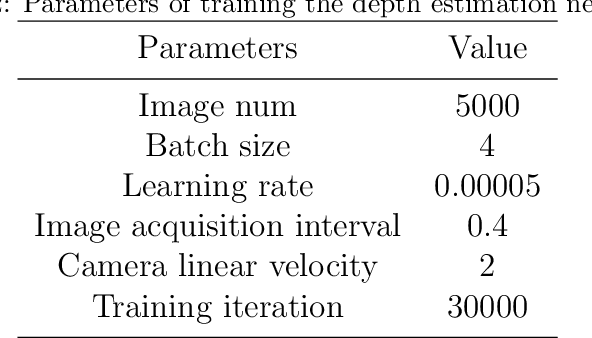
The rapid development of unmanned aerial vehicles (UAV) puts forward a higher requirement for autonomous obstacle avoidance. Due to the limited payload and power supply, small UAVs such as quadrotors usually carry simple sensors and computation units, which makes traditional methods more challenging to implement. In this paper, a novel framework is demonstrated to control a quadrotor flying through crowded environments autonomously with monocular vision. The framework adopts a two-stage architecture, consisting of a sensing module and a decision module. The sensing module is based on an unsupervised deep learning method. And the decision module uses dueling double deep recurrent Q-learning to eliminate the adverse effects of limited observation capacity of an on-board monocular camera. The framework enables the quadrotor to realize autonomous obstacle avoidance without any prior environment information or labeled datasets for training. The trained model shows a high success rate in the simulation and a good generalization ability for transformed scenarios.