 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWisteria: A Unified Multi-Scale Feature Learning Framework for DNA Language Model
May 07, 2026DNA language model aims to decipher the regulatory grammar and semantic of genomes by capturing long range dependencies in DNA sequences. Existing methods emphasize long range token interactions but often ignore the interplay between local motifs and global dependencies. In this paper, we propose Wisteria, a genomic language model that integrates multi scale feature learning within a unified framework for DNA sequence. Specifically, Wisteria augments the Mamba based architecture with gated dilated convolutions to capture local motifs and regulatory patterns, while gated multilayer perceptrons refine global dependencies. We further introduce a Fourier based attention mechanism to support frequency domain modeling, periodic extension and length generalization. Across four experimental settings with both short and long range dependencies, Wisteria demonstrates strong performance on downstream benchmarks against competitive DNA language model baselines. These results indicate that Wisteria effectively unifies local and global dependency modeling for multi scale genomic sequence analysis.
Debate to Align: Reliable Entity Alignment through Two-Stage Multi-Agent Debate
Apr 15, 2026Entity alignment (EA) aims to identify entities referring to the same real-world object across different knowledge graphs (KGs). Recent approaches based on large language models (LLMs) typically obtain entity embeddings through knowledge representation learning and use embedding similarity to identify an alignment-uncertain entity set. For each uncertain entity, a candidate entity set (CES) is then retrieved based on embedding similarity to support subsequent alignment reasoning and decision making. However, the reliability of the CES and the reasoning capability of LLMs critically affect the effectiveness of subsequent alignment decisions. To address this issue, we propose AgentEA, a reliable EA framework based on multi-agent debate. AgentEA first improves embedding quality through entity representation preference optimization, and then introduces a two-stage multi-role debate mechanism consisting of lightweight debate verification and deep debate alignment to progressively enhance the reliability of alignment decisions while enabling more efficient debate-based reasoning. Extensive experiments on public benchmarks under cross-lingual, sparse, large-scale, and heterogeneous settings demonstrate the effectiveness of AgentEA.
Super4DR: 4D Radar-centric Self-supervised Odometry and Gaussian-based Map Optimization
Dec 10, 2025



Conventional SLAM systems using visual or LiDAR data often struggle in poor lighting and severe weather. Although 4D radar is suited for such environments, its sparse and noisy point clouds hinder accurate odometry estimation, while the radar maps suffer from obscure and incomplete structures. Thus, we propose Super4DR, a 4D radar-centric framework for learning-based odometry estimation and gaussian-based map optimization. First, we design a cluster-aware odometry network that incorporates object-level cues from the clustered radar points for inter-frame matching, alongside a hierarchical self-supervision mechanism to overcome outliers through spatio-temporal consistency, knowledge transfer, and feature contrast. Second, we propose using 3D gaussians as an intermediate representation, coupled with a radar-specific growth strategy, selective separation, and multi-view regularization, to recover blurry map areas and those undetected based on image texture. Experiments show that Super4DR achieves a 67% performance gain over prior self-supervised methods, nearly matches supervised odometry, and narrows the map quality disparity with LiDAR while enabling multi-modal image rendering.
Towards 3D Object-Centric Feature Learning for Semantic Scene Completion
Nov 18, 2025Vision-based 3D Semantic Scene Completion (SSC) has received growing attention due to its potential in autonomous driving. While most existing approaches follow an ego-centric paradigm by aggregating and diffusing features over the entire scene, they often overlook fine-grained object-level details, leading to semantic and geometric ambiguities, especially in complex environments. To address this limitation, we propose Ocean, an object-centric prediction framework that decomposes the scene into individual object instances to enable more accurate semantic occupancy prediction. Specifically, we first employ a lightweight segmentation model, MobileSAM, to extract instance masks from the input image. Then, we introduce a 3D Semantic Group Attention module that leverages linear attention to aggregate object-centric features in 3D space. To handle segmentation errors and missing instances, we further design a Global Similarity-Guided Attention module that leverages segmentation features for global interaction. Finally, we propose an Instance-aware Local Diffusion module that improves instance features through a generative process and subsequently refines the scene representation in the BEV space. Extensive experiments on the SemanticKITTI and SSCBench-KITTI360 benchmarks demonstrate that Ocean achieves state-of-the-art performance, with mIoU scores of 17.40 and 20.28, respectively.
Unifying Dual-Space Embedding for Entity Alignment via Contrastive Learning
Dec 06, 2024



Entity alignment aims to match identical entities across different knowledge graphs (KGs). Graph neural network-based entity alignment methods have achieved promising results in Euclidean space. However, KGs often contain complex structures, including both local and hierarchical ones, which make it challenging to efficiently represent them within a single space. In this paper, we proposed a novel method UniEA, which unifies dual-space embedding to preserve the intrinsic structure of KGs. Specifically, we learn graph structure embedding in both Euclidean and hyperbolic spaces simultaneously to maximize the consistency between the embedding in both spaces. Moreover, we employ contrastive learning to mitigate the misalignment issues caused by similar entities, where embedding of similar neighboring entities within the KG become too close in distance. Extensive experiments on benchmark datasets demonstrate that our method achieves state-of-the-art performance in structure-based EA. Our code is available at https://github.com/wonderCS1213/UniEA.
Distance-Adaptive Quaternion Knowledge Graph Embedding with Bidirectional Rotation
Dec 05, 2024



Quaternion contains one real part and three imaginary parts, which provided a more expressive hypercomplex space for learning knowledge graph. Existing quaternion embedding models measure the plausibility of a triplet either through semantic matching or geometric distance scoring functions. However, it appears that semantic matching diminishes the separability of entities, while the distance scoring function weakens the semantics of entities. To address this issue, we propose a novel quaternion knowledge graph embedding model. Our model combines semantic matching with entity's geometric distance to better measure the plausibility of triplets. Specifically, in the quaternion space, we perform a right rotation on head entity and a reverse rotation on tail entity to learn rich semantic features. Then, we utilize distance adaptive translations to learn geometric distance between entities. Furthermore, we provide mathematical proofs to demonstrate our model can handle complex logical relationships. Extensive experimental results and analyses show our model significantly outperforms previous models on well-known knowledge graph completion benchmark datasets. Our code is available at https://github.com/llqy123/DaBR.
Fully Hyperbolic Rotation for Knowledge Graph Embedding
Nov 07, 2024



Hyperbolic rotation is commonly used to effectively model knowledge graphs and their inherent hierarchies. However, existing hyperbolic rotation models rely on logarithmic and exponential mappings for feature transformation. These models only project data features into hyperbolic space for rotation, limiting their ability to fully exploit the hyperbolic space. To address this problem, we propose a novel fully hyperbolic model designed for knowledge graph embedding. Instead of feature mappings, we define the model directly in hyperbolic space with the Lorentz model. Our model considers each relation in knowledge graphs as a Lorentz rotation from the head entity to the tail entity. We adopt the Lorentzian version distance as the scoring function for measuring the plausibility of triplets. Extensive results on standard knowledge graph completion benchmarks demonstrated that our model achieves competitive results with fewer parameters. In addition, our model get the state-of-the-art performance on datasets of CoDEx-s and CoDEx-m, which are more diverse and challenging than before. Our code is available at https://github.com/llqy123/FHRE.
L$^2$GC: Lorentzian Linear Graph Convolutional Networks For Node Classification
Mar 10, 2024



Linear Graph Convolutional Networks (GCNs) are used to classify the node in the graph data. However, we note that most existing linear GCN models perform neural network operations in Euclidean space, which do not explicitly capture the tree-like hierarchical structure exhibited in real-world datasets that modeled as graphs. In this paper, we attempt to introduce hyperbolic space into linear GCN and propose a novel framework for Lorentzian linear GCN. Specifically, we map the learned features of graph nodes into hyperbolic space, and then perform a Lorentzian linear feature transformation to capture the underlying tree-like structure of data. Experimental results on standard citation networks datasets with semi-supervised learning show that our approach yields new state-of-the-art results of accuracy 74.7$\%$ on Citeseer and 81.3$\%$ on PubMed datasets. Furthermore, we observe that our approach can be trained up to two orders of magnitude faster than other nonlinear GCN models on PubMed dataset. Our code is publicly available at https://github.com/llqy123/LLGC-master.
Modelling the Point Spread Function of Wide Field Small Aperture Telescopes With Deep Neural Networks -- Applications in Point Spread Function Estimation
Nov 20, 2020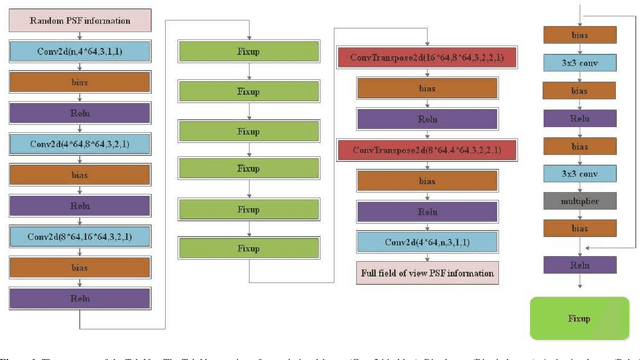
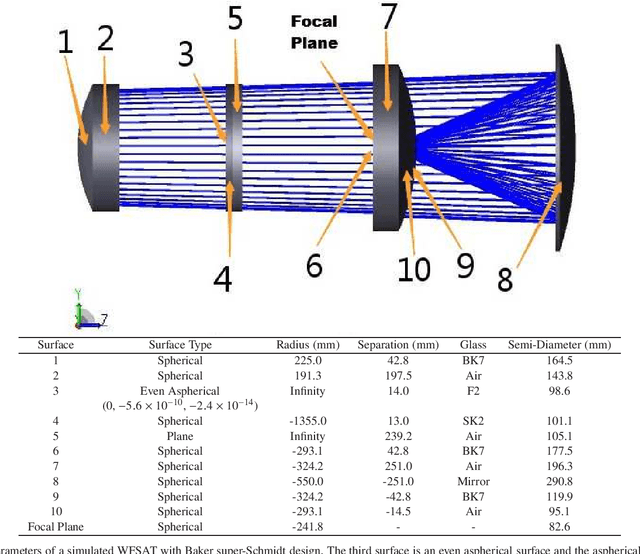
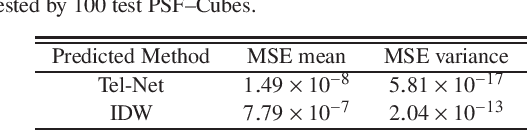
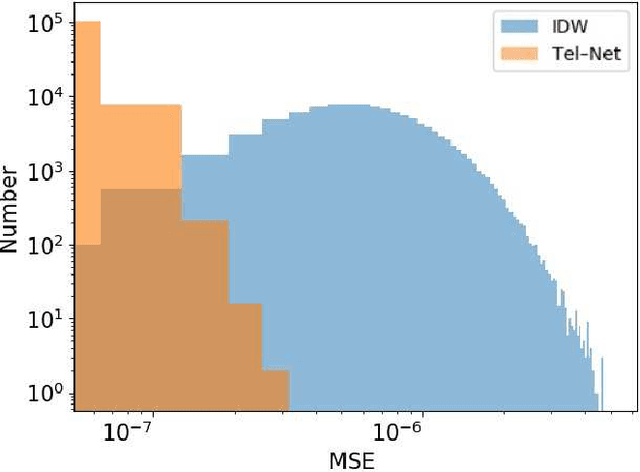
The point spread function (PSF) reflects states of a telescope and plays an important role in development of smart data processing methods. However, for wide field small aperture telescopes (WFSATs), estimating PSF in any position of the whole field of view (FoV) is hard, because aberrations induced by the optical system are quite complex and the signal to noise ratio of star images is often too low for PSF estimation. In this paper, we further develop our deep neural network (DNN) based PSF modelling method and show its applications in PSF estimation. During the telescope alignment and testing stage, our method collects system calibration data through modification of optical elements within engineering tolerances (tilting and decentering). Then we use these data to train a DNN. After training, the DNN can estimate PSF in any field of view from several discretely sampled star images. We use both simulated and experimental data to test performance of our method. The results show that our method could successfully reconstruct PSFs of WFSATs of any states and in any positions of the FoV. Its results are significantly more precise than results obtained by the compared classic method - Inverse Distance Weight (IDW) interpolation. Our method provides foundations for developing of smart data processing methods for WFSATs in the future.
Compressive Shack-Hartmann Wavefront Sensing based on Deep Neural Networks
Nov 20, 2020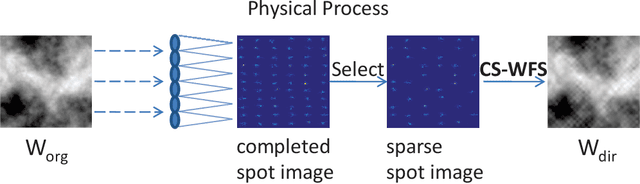

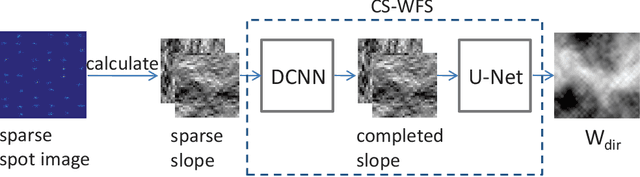
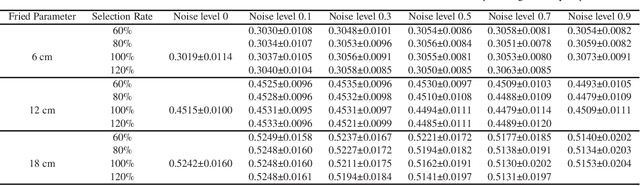
The Shack-Hartmann wavefront sensor is widely used to measure aberrations induced by atmospheric turbulence in adaptive optics systems. However if there exists strong atmospheric turbulence or the brightness of guide stars is low, the accuracy of wavefront measurements will be affected. In this paper, we propose a compressive Shack-Hartmann wavefront sensing method. Instead of reconstructing wavefronts with slope measurements of all sub-apertures, our method reconstructs wavefronts with slope measurements of sub-apertures which have spot images with high signal to noise ratio. Besides, we further propose to use a deep neural network to accelerate wavefront reconstruction speed. During the training stage of the deep neural network, we propose to add a drop-out layer to simulate the compressive sensing process, which could increase development speed of our method. After training, the compressive Shack-Hartmann wavefront sensing method can reconstruct wavefronts in high spatial resolution with slope measurements from only a small amount of sub-apertures. We integrate the straightforward compressive Shack-Hartmann wavefront sensing method with image deconvolution algorithm to develop a high-order image restoration method. We use images restored by the high-order image restoration method to test the performance of our the compressive Shack-Hartmann wavefront sensing method. The results show that our method can improve the accuracy of wavefront measurements and is suitable for real-time applications.