 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKnowledge-augmented Frame Semantic Parsing with Hybrid Prompt-tuning
Mar 25, 2023



Frame semantics-based approaches have been widely used in semantic parsing tasks and have become mainstream. It remains challenging to disambiguate frame representations evoked by target lexical units under different contexts. Pre-trained Language Models (PLMs) have been used in semantic parsing and significantly improve the accuracy of neural parsers. However, the PLMs-based approaches tend to favor collocated patterns presented in the training data, leading to inaccurate outcomes. The intuition here is to design a mechanism to optimally use knowledge captured in semantic frames in conjunction with PLMs to disambiguate frames. We propose a novel Knowledge-Augmented Frame Semantic Parsing Architecture (KAF-SPA) to enhance semantic representation by incorporating accurate frame knowledge into PLMs during frame semantic parsing. Specifically, a Memory-based Knowledge Extraction Module (MKEM) is devised to select accurate frame knowledge and construct the continuous templates in the high dimensional vector space. Moreover, we design a Task-oriented Knowledge Probing Module (TKPM) using hybrid prompts (in terms of continuous and discrete prompts) to incorporate the selected knowledge into the PLMs and adapt PLMs to the tasks of frame and argument identification. Experimental results on two public FrameNet datasets demonstrate that our method significantly outperforms strong baselines (by more than +3$\%$ in F1), achieving state-of-art results on the current benchmark. Ablation studies verify the effectiveness of KAF-SPA.
Improving Table Structure Recognition with Visual-Alignment Sequential Coordinate Modeling
Mar 20, 2023



Table structure recognition aims to extract the logical and physical structure of unstructured table images into a machine-readable format. The latest end-to-end image-to-text approaches simultaneously predict the two structures by two decoders, where the prediction of the physical structure (the bounding boxes of the cells) is based on the representation of the logical structure. However, the previous methods struggle with imprecise bounding boxes as the logical representation lacks local visual information. To address this issue, we propose an end-to-end sequential modeling framework for table structure recognition called VAST. It contains a novel coordinate sequence decoder triggered by the representation of the non-empty cell from the logical structure decoder. In the coordinate sequence decoder, we model the bounding box coordinates as a language sequence, where the left, top, right and bottom coordinates are decoded sequentially to leverage the inter-coordinate dependency. Furthermore, we propose an auxiliary visual-alignment loss to enforce the logical representation of the non-empty cells to contain more local visual details, which helps produce better cell bounding boxes. Extensive experiments demonstrate that our proposed method can achieve state-of-the-art results in both logical and physical structure recognition. The ablation study also validates that the proposed coordinate sequence decoder and the visual-alignment loss are the keys to the success of our method.
Video Action Recognition with Attentive Semantic Units
Mar 17, 2023



Visual-Language Models (VLMs) have significantly advanced action video recognition. Supervised by the semantics of action labels, recent works adapt the visual branch of VLMs to learn video representations. Despite the effectiveness proved by these works, we believe that the potential of VLMs has yet to be fully harnessed. In light of this, we exploit the semantic units (SU) hiding behind the action labels and leverage their correlations with fine-grained items in frames for more accurate action recognition. SUs are entities extracted from the language descriptions of the entire action set, including body parts, objects, scenes, and motions. To further enhance the alignments between visual contents and the SUs, we introduce a multi-region module (MRA) to the visual branch of the VLM. The MRA allows the perception of region-aware visual features beyond the original global feature. Our method adaptively attends to and selects relevant SUs with visual features of frames. With a cross-modal decoder, the selected SUs serve to decode spatiotemporal video representations. In summary, the SUs as the medium can boost discriminative ability and transferability. Specifically, in fully-supervised learning, our method achieved 87.8\% top-1 accuracy on Kinetics-400. In K=2 few-shot experiments, our method surpassed the previous state-of-the-art by +7.1% and +15.0% on HMDB-51 and UCF-101, respectively.
Generating Realistic 3D Brain MRIs Using a Conditional Diffusion Probabilistic Model
Dec 15, 2022Training deep learning models on brain MRI is often plagued by small sample size, which can lead to biased training or overfitting. One potential solution is to synthetically generate realistic MRIs via generative models such as Generative Adversarial Network (GAN). However, existing GANs for synthesizing realistic brain MRIs largely rely on image-to-image conditioned transformations requiring extensive, well-curated pairs of MRI samples for training. On the other hand, unconditioned GAN models (i.e., those generating MRI from random noise) are unstable during training and tend to produce blurred images during inference. Here, we propose an efficient strategy that generates high fidelity 3D brain MRI via Diffusion Probabilistic Model (DPM). To this end, we train a conditional DPM with attention to generate an MRI sub-volume (a set of slices at arbitrary locations) conditioned on another subset of slices from the same MRI. By computing attention weights from slice indices and using a mask to encode the target and conditional slices, the model is able to learn the long-range dependency across distant slices with limited computational resources. After training, the model can progressively synthesize a new 3D brain MRI by generating the first subset of slices from random noise and conditionally generating subsequent slices. Based on 1262 t1-weighted MRIs from three neuroimaging studies, our experiments demonstrate that the proposed method can generate high quality 3D MRIs that share the same distribution as real MRIs and are more realistic than the ones produced by GAN-based models.
RBF-MGN:Solving spatiotemporal PDEs with Physics-informed Graph Neural Network
Dec 06, 2022Physics-informed neural networks (PINNs) have lately received significant attention as a representative deep learning-based technique for solving partial differential equations (PDEs). Most fully connected network-based PINNs use automatic differentiation to construct loss functions that suffer from slow convergence and difficult boundary enforcement. In addition, although convolutional neural network (CNN)-based PINNs can significantly improve training efficiency, CNNs have difficulty in dealing with irregular geometries with unstructured meshes. Therefore, we propose a novel framework based on graph neural networks (GNNs) and radial basis function finite difference (RBF-FD). We introduce GNNs into physics-informed learning to better handle irregular domains with unstructured meshes. RBF-FD is used to construct a high-precision difference format of the differential equations to guide model training. Finally, we perform numerical experiments on Poisson and wave equations on irregular domains. We illustrate the generalizability, accuracy, and efficiency of the proposed algorithms on different PDE parameters, numbers of collection points, and several types of RBFs.
IRRGN: An Implicit Relational Reasoning Graph Network for Multi-turn Response Selection
Dec 01, 2022



The task of response selection in multi-turn dialogue is to find the best option from all candidates. In order to improve the reasoning ability of the model, previous studies pay more attention to using explicit algorithms to model the dependencies between utterances, which are deterministic, limited and inflexible. In addition, few studies consider differences between the options before and after reasoning. In this paper, we propose an Implicit Relational Reasoning Graph Network to address these issues, which consists of the Utterance Relational Reasoner (URR) and the Option Dual Comparator (ODC). URR aims to implicitly extract dependencies between utterances, as well as utterances and options, and make reasoning with relational graph convolutional networks. ODC focuses on perceiving the difference between the options through dual comparison, which can eliminate the interference of the noise options. Experimental results on two multi-turn dialogue reasoning benchmark datasets MuTual and MuTual+ show that our method significantly improves the baseline of four pretrained language models and achieves state-of-the-art performance. The model surpasses human performance for the first time on the MuTual dataset.
Data Leakage and Evaluation Issues in Micro-Expression Analysis
Nov 21, 2022



Micro-expressions have drawn increasing interest lately due to various potential applications. The task is, however, difficult as it incorporates many challenges from the fields of computer vision, machine learning and emotional sciences. Due to the spontaneous and subtle characteristics of micro-expressions, the available training and testing data are limited, which make evaluation complex. We show that data leakage and fragmented evaluation protocols are issues among the micro-expression literature. We find that fixing data leaks can drastically reduce model performance, in some cases even making the models perform similarly to a random classifier. To this end, we go through common pitfalls, propose a new standardized evaluation protocol using facial action units with over 2000 micro-expression samples, and provide an open source library that implements the evaluation protocols in a standardized manner. Code will be available in \url{https://github.com/tvaranka/meb}.
Misinformation Detection using Persuasive Writing Strategies
Nov 11, 2022The spread of misinformation is a prominent problem in today's society, and many researchers in academia and industry are trying to combat it. Due to the vast amount of misinformation that is created every day, it is unrealistic to leave this task to human fact-checkers. Data scientists and researchers have been working on automated misinformation detection for years, and it is still a challenging problem today. The goal of our research is to add a new level to automated misinformation detection; classifying segments of text with persuasive writing techniques in order to produce interpretable reasoning for why an article can be marked as misinformation. To accomplish this, we present a novel annotation scheme containing many common persuasive writing tactics, along with a dataset with human annotations accordingly. For this task, we make use of a RoBERTa model for text classification, due to its high performance in NLP. We develop several language model-based baselines and present the results of our persuasive strategy label predictions as well as the improvements these intermediate labels make in detecting misinformation and producing interpretable results.
FADO: Feedback-Aware Double COntrolling Network for Emotional Support Conversation
Nov 01, 2022Emotional Support Conversation (ESConv) aims to reduce help-seekers'emotional distress with the supportive strategy and response. It is essential for the supporter to select an appropriate strategy with the feedback of the help-seeker (e.g., emotion change during dialog turns, etc) in ESConv. However, previous methods mainly focus on the dialog history to select the strategy and ignore the help-seeker's feedback, leading to the wrong and user-irrelevant strategy prediction. In addition, these approaches only model the context-to-strategy flow and pay less attention to the strategy-to-context flow that can focus on the strategy-related context for generating the strategy-constrain response. In this paper, we propose a Feedback-Aware Double COntrolling Network (FADO) to make a strategy schedule and generate the supportive response. The core module in FADO consists of a dual-level feedback strategy selector and a double control reader. Specifically, the dual-level feedback strategy selector leverages the turn-level and conversation-level feedback to encourage or penalize strategies. The double control reader constructs the novel strategy-to-context flow for generating the strategy-constrain response. Furthermore, a strategy dictionary is designed to enrich the semantic information of the strategy and improve the quality of strategy-constrain response. Experimental results on ESConv show that the proposed FADO has achieved the state-of-the-art performance in terms of both strategy selection and response generation. Our code is available at https://github/after/reviewing.
Robust Regression with Highly Corrupted Data via Physics Informed Neural Networks
Oct 19, 2022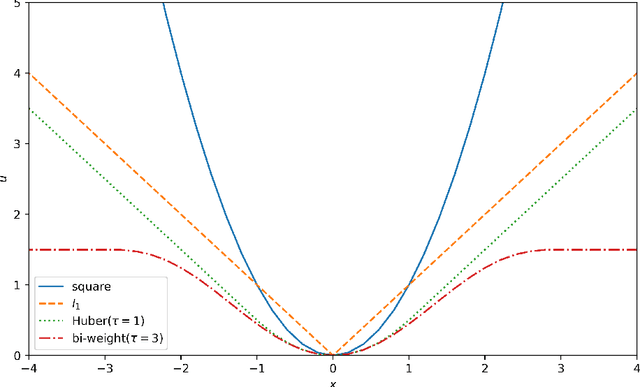
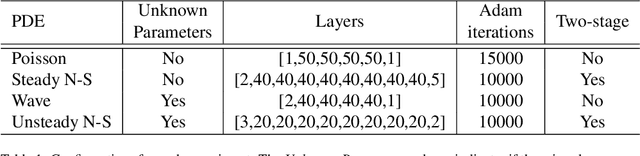
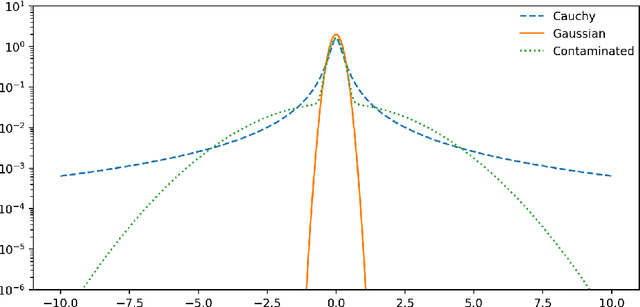
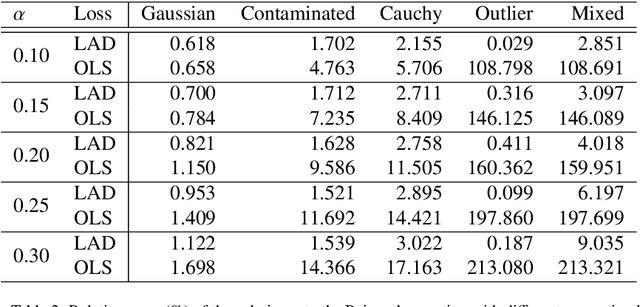
Physics-informed neural networks (PINNs) have been proposed to solve two main classes of problems: data-driven solutions and data-driven discovery of partial differential equations. This task becomes prohibitive when such data is highly corrupted due to the possible sensor mechanism failing. We propose the Least Absolute Deviation based PINN (LAD-PINN) to reconstruct the solution and recover unknown parameters in PDEs - even if spurious data or outliers corrupt a large percentage of the observations. To further improve the accuracy of recovering hidden physics, the two-stage Median Absolute Deviation based PINN (MAD-PINN) is proposed, where LAD-PINN is employed as an outlier detector followed by MAD screening out the highly corrupted data. Then the vanilla PINN or its variants can be subsequently applied to exploit the remaining normal data. Through several examples, including Poisson's equation, wave equation, and steady or unsteady Navier-Stokes equations, we illustrate the generalizability, accuracy and efficiency of the proposed algorithms for recovering governing equations from noisy and highly corrupted measurement data.