 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMechanical Search on Shelves using Lateral Access X-RAY
Nov 23, 2020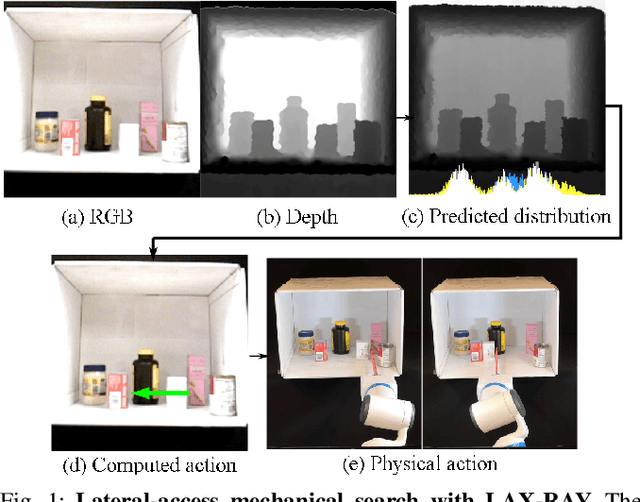
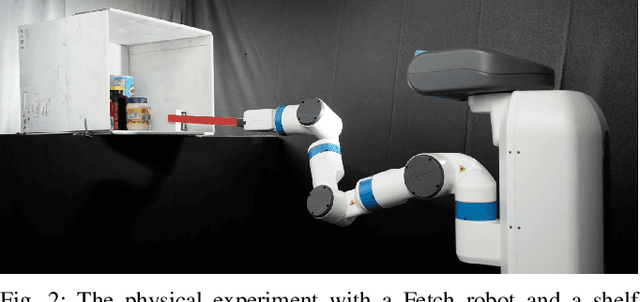
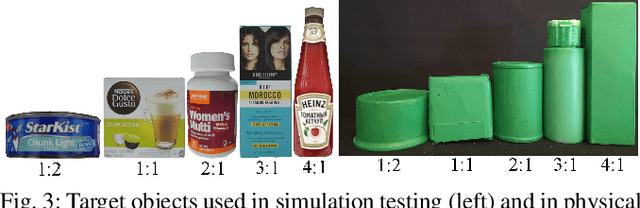

Efficiently finding an occluded object with lateral access arises in many contexts such as warehouses, retail, healthcare, shipping, and homes. We introduce LAX-RAY (Lateral Access maXimal Reduction of occupancY support Area), a system to automate the mechanical search for occluded objects on shelves. For such lateral access environments, LAX-RAY couples a perception pipeline predicting a target object occupancy support distribution with a mechanical search policy that sequentially selects occluding objects to push to the side to reveal the target as efficiently as possible. Within the context of extruded polygonal objects and a stationary target with a known aspect ratio, we explore three lateral access search policies: Distribution Area Reduction (DAR), Distribution Entropy Reduction (DER), and Distribution Entropy Reduction over Multiple Time Steps (DER-MT) utilizing the support distribution and prior information. We evaluate these policies using the First-Order Shelf Simulator (FOSS) in which we simulate 800 random shelf environments of varying difficulty, and in a physical shelf environment with a Fetch robot and an embedded PrimeSense RGBD Camera. Average simulation results of 87.3% success rate demonstrate better performance of DER-MT with 2 prediction steps. When deployed on the robot, results show a success rate of at least 80% for all policies, suggesting that LAX-RAY can efficiently reveal the target object in reality. Both results show significantly better performance of the three proposed policies compared to a baseline policy with uniform probability distribution assumption in non-trivial cases, showing the importance of distribution prediction. Code, videos, and supplementary material can be found at https://sites.google.com/berkeley.edu/lax-ray.
Accelerating Grasp Exploration by Leveraging Learned Priors
Nov 11, 2020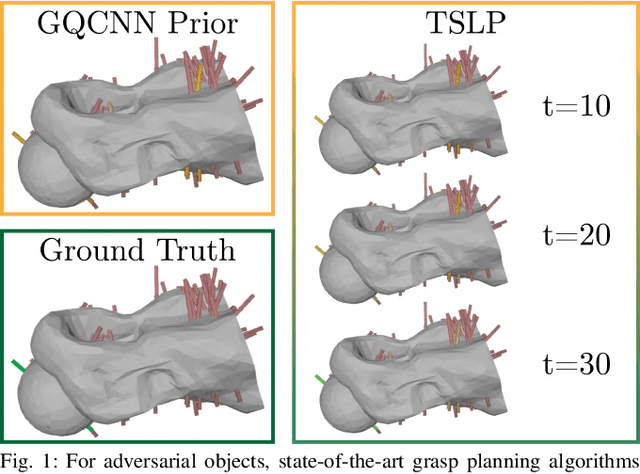
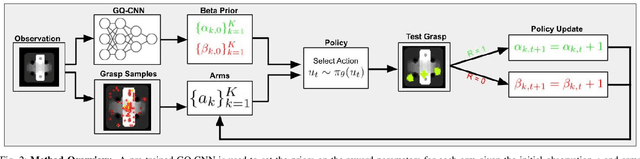
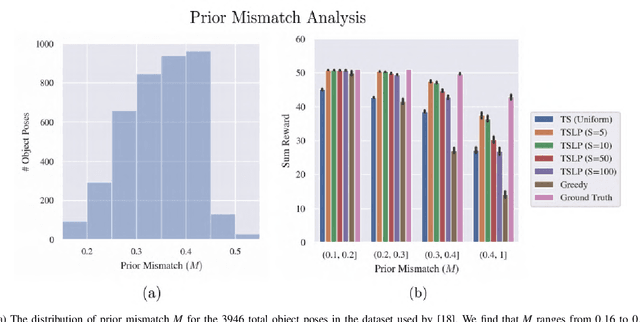
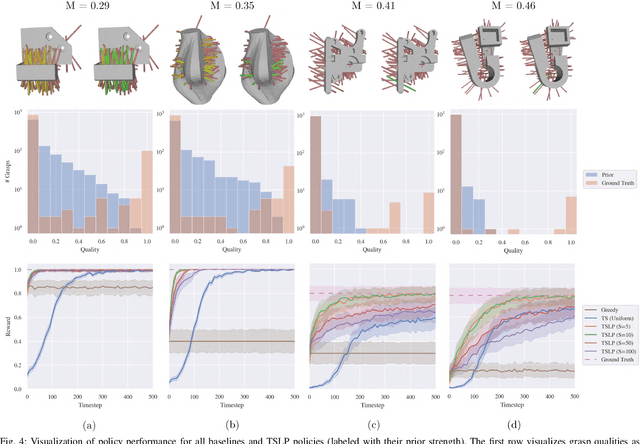
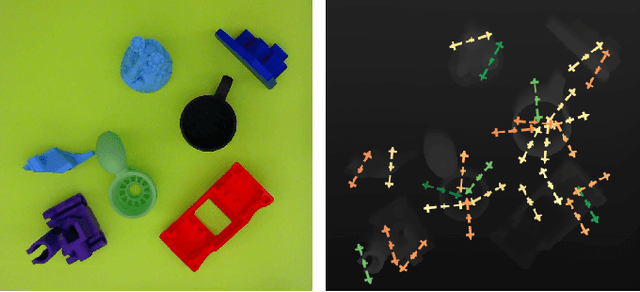
The ability of robots to grasp novel objects has industry applications in e-commerce order fulfillment and home service. Data-driven grasping policies have achieved success in learning general strategies for grasping arbitrary objects. However, these approaches can fail to grasp objects which have complex geometry or are significantly outside of the training distribution. We present a Thompson sampling algorithm that learns to grasp a given object with unknown geometry using online experience. The algorithm leverages learned priors from the Dexterity Network robot grasp planner to guide grasp exploration and provide probabilistic estimates of grasp success for each stable pose of the novel object. We find that seeding the policy with the Dex-Net prior allows it to more efficiently find robust grasps on these objects. Experiments suggest that the best learned policy attains an average total reward 64.5% higher than a greedy baseline and achieves within 5.7% of an oracle baseline when evaluated over 300,000 training runs across a set of 3000 object poses.
Industrial Robot Grasping with Deep Learning using a Programmable Logic Controller (PLC)
Apr 21, 2020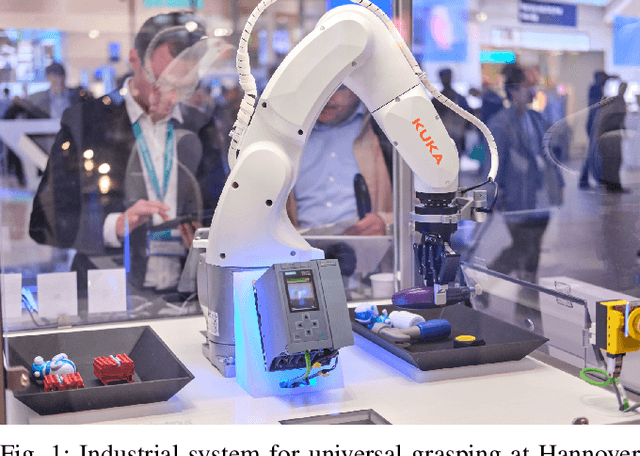
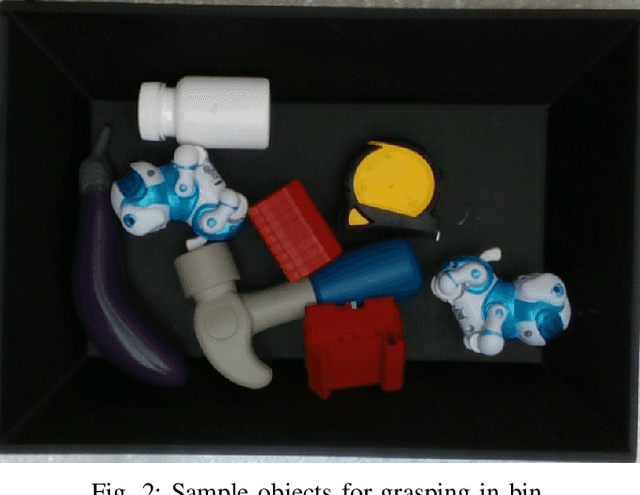
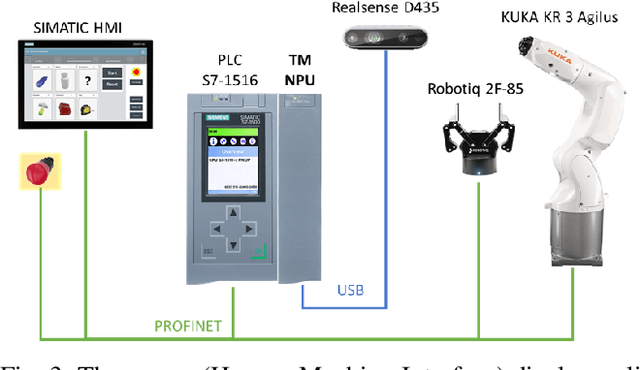
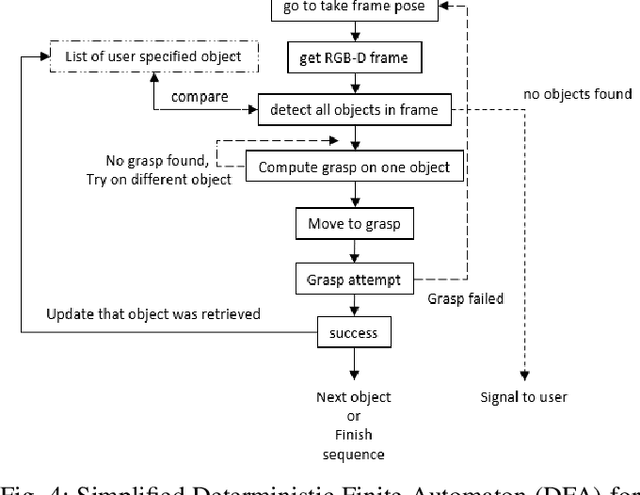
Universal grasping of a diverse range of previously unseen objects from heaps is a grand challenge in e-commerce order fulfillment, manufacturing, and home service robotics. Recently, deep learning based grasping approaches have demonstrated results that make them increasingly interesting for industrial deployments. This paper explores the problem from an automation systems point-of-view. We develop a robotics grasping system using Dex-Net, which is fully integrated at the controller level. Two neural networks are deployed on a novel industrial AI hardware acceleration module close to a PLC with a power footprint of less than 10 W for the overall system. The software is tightly integrated with the hardware allowing for fast and efficient data processing and real-time communication. The success rate of grasping an object form a bin is up to 95 percent with more than 350 picks per hour, if object and receptive bins are in close proximity. The system was presented at the Hannover Fair 2019 (world s largest industrial trade fair) and other events, where it performed over 5,000 grasps per event.
GOMP: Grasp-Optimized Motion Planning for Bin Picking
Mar 05, 2020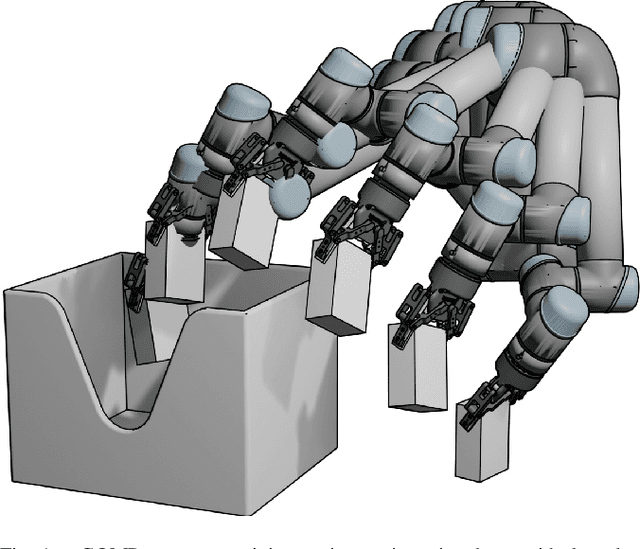
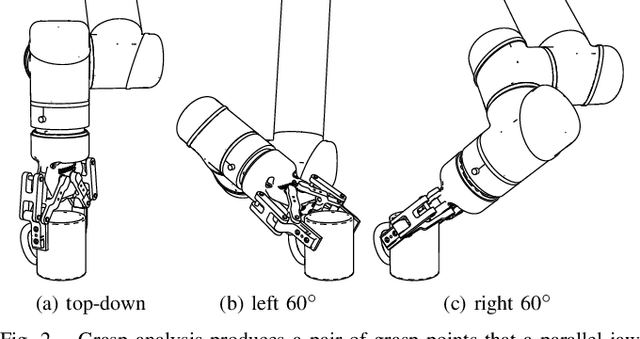

Rapid and reliable robot bin picking is a critical challenge in automating warehouses, often measured in picks-per-hour (PPH). We explore increasing PPH using faster motions based on optimizing over a set of candidate grasps. The source of this set of grasps is two-fold: (1) grasp-analysis tools such as Dex-Net generate multiple candidate grasps, and (2) each of these grasps has a degree of freedom about which a robot gripper can rotate. In this paper, we present Grasp-Optimized Motion Planning (GOMP), an algorithm that speeds up the execution of a bin-picking robot's operations by incorporating robot dynamics and a set of candidate grasps produced by a grasp planner into an optimizing motion planner. We compute motions by optimizing with sequential quadratic programming (SQP) and iteratively updating trust regions to account for the non-convex nature of the problem. In our formulation, we constrain the motion to remain within the mechanical limits of the robot while avoiding obstacles. We further convert the problem to a time-minimization by repeatedly shorting a time horizon of a trajectory until the SQP is infeasible. In experiments with a UR5, GOMP achieves a speedup of 9x over a baseline planner.