 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbNeRF: Uncertainty-Aware Inference of 3D Shapes from 2D Images
Oct 27, 2022



The problem of inferring object shape from a single 2D image is underconstrained. Prior knowledge about what objects are plausible can help, but even given such prior knowledge there may still be uncertainty about the shapes of occluded parts of objects. Recently, conditional neural radiance field (NeRF) models have been developed that can learn to infer good point estimates of 3D models from single 2D images. The problem of inferring uncertainty estimates for these models has received less attention. In this work, we propose probabilistic NeRF (ProbNeRF), a model and inference strategy for learning probabilistic generative models of 3D objects' shapes and appearances, and for doing posterior inference to recover those properties from 2D images. ProbNeRF is trained as a variational autoencoder, but at test time we use Hamiltonian Monte Carlo (HMC) for inference. Given one or a few 2D images of an object (which may be partially occluded), ProbNeRF is able not only to accurately model the parts it sees, but also to propose realistic and diverse hypotheses about the parts it does not see. We show that key to the success of ProbNeRF are (i) a deterministic rendering scheme, (ii) an annealed-HMC strategy, (iii) a hypernetwork-based decoder architecture, and (iv) doing inference over a full set of NeRF weights, rather than just a low-dimensional code.
Abstract Interpretation for Generalized Heuristic Search in Model-Based Planning
Aug 05, 2022

Domain-general model-based planners often derive their generality by constructing search heuristics through the relaxation or abstraction of symbolic world models. We illustrate how abstract interpretation can serve as a unifying framework for these abstraction-based heuristics, extending the reach of heuristic search to richer world models that make use of more complex datatypes and functions (e.g. sets, geometry), and even models with uncertainty and probabilistic effects. These heuristics can also be integrated with learning, allowing agents to jumpstart planning in novel world models via abstraction-derived information that is later refined by experience. This suggests that abstract interpretation can play a key role in building universal reasoning systems.
Solving the Baby Intuitions Benchmark with a Hierarchically Bayesian Theory of Mind
Aug 04, 2022


To facilitate the development of new models to bridge the gap between machine and human social intelligence, the recently proposed Baby Intuitions Benchmark (arXiv:2102.11938) provides a suite of tasks designed to evaluate commonsense reasoning about agents' goals and actions that even young infants exhibit. Here we present a principled Bayesian solution to this benchmark, based on a hierarchically Bayesian Theory of Mind (HBToM). By including hierarchical priors on agent goals and dispositions, inference over our HBToM model enables few-shot learning of the efficiency and preferences of an agent, which can then be used in commonsense plausibility judgements about subsequent agent behavior. This approach achieves near-perfect accuracy on most benchmark tasks, outperforming deep learning and imitation learning baselines while producing interpretable human-like inferences, demonstrating the advantages of structured Bayesian models of human social cognition.
Estimators of Entropy and Information via Inference in Probabilistic Models
Apr 13, 2022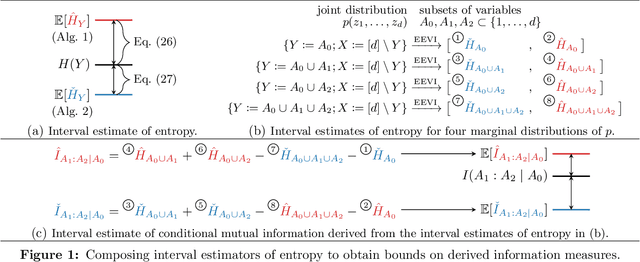
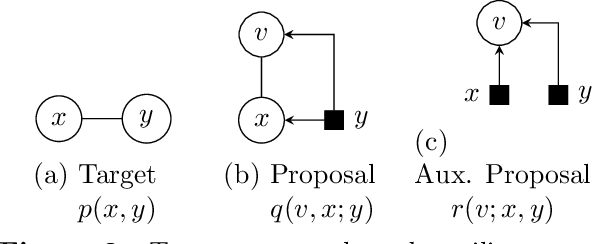
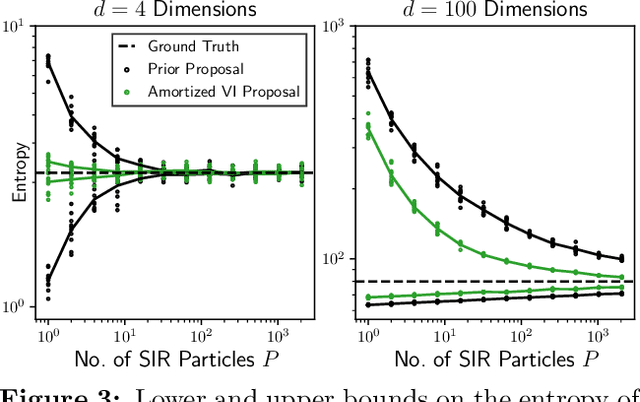
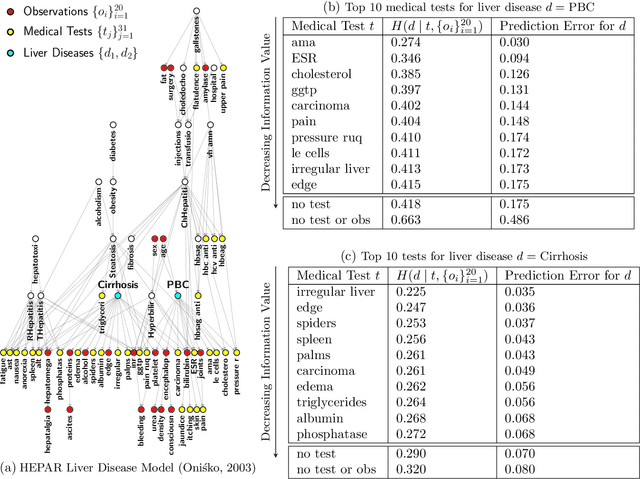
Estimating information-theoretic quantities such as entropy and mutual information is central to many problems in statistics and machine learning, but challenging in high dimensions. This paper presents estimators of entropy via inference (EEVI), which deliver upper and lower bounds on many information quantities for arbitrary variables in a probabilistic generative model. These estimators use importance sampling with proposal distribution families that include amortized variational inference and sequential Monte Carlo, which can be tailored to the target model and used to squeeze true information values with high accuracy. We present several theoretical properties of EEVI and demonstrate scalability and efficacy on two problems from the medical domain: (i) in an expert system for diagnosing liver disorders, we rank medical tests according to how informative they are about latent diseases, given a pattern of observed symptoms and patient attributes; and (ii) in a differential equation model of carbohydrate metabolism, we find optimal times to take blood glucose measurements that maximize information about a diabetic patient's insulin sensitivity, given their meal and medication schedule.
Recursive Monte Carlo and Variational Inference with Auxiliary Variables
Mar 05, 2022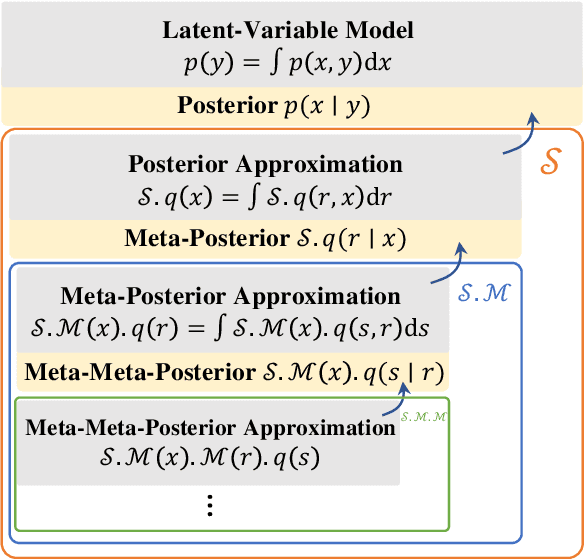
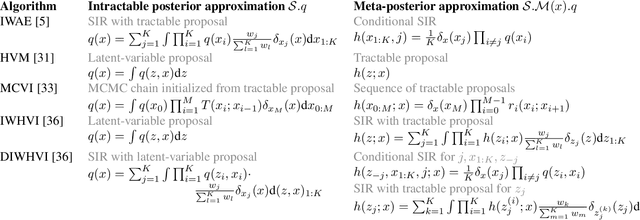
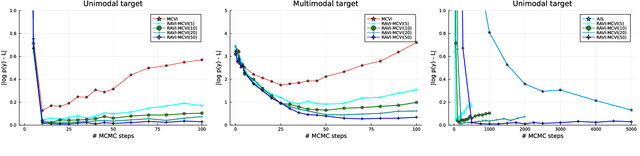
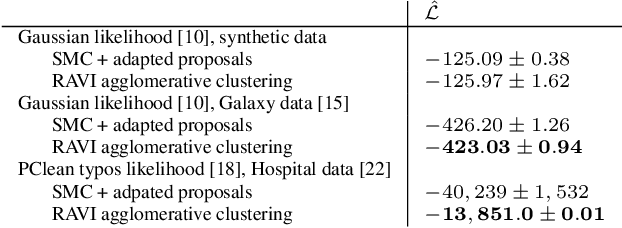
A key challenge in applying Monte Carlo and variational inference (VI) is the design of proposals and variational families that are flexible enough to closely approximate the posterior, but simple enough to admit tractable densities and variational bounds. This paper presents recursive auxiliary-variable inference (RAVI), a new framework for exploiting flexible proposals, for example based on involved simulations or stochastic optimization, within Monte Carlo and VI algorithms. The key idea is to estimate intractable proposal densities via meta-inference: additional Monte Carlo or variational inference targeting the proposal, rather than the model. RAVI generalizes and unifies several existing methods for inference with expressive approximating families, which we show correspond to specific choices of meta-inference algorithm, and provides new theory for analyzing their bias and variance. We illustrate RAVI's design framework and theorems by using them to analyze and improve upon Salimans et al. (2015)'s Markov Chain Variational Inference, and to design a novel sampler for Dirichlet process mixtures, achieving state-of-the-art results on a standard benchmark dataset from astronomy and on a challenging data-cleaning task with Medicare hospital data.
DURableVS: Data-efficient Unsupervised Recalibrating Visual Servoing via online learning in a structured generative model
Feb 08, 2022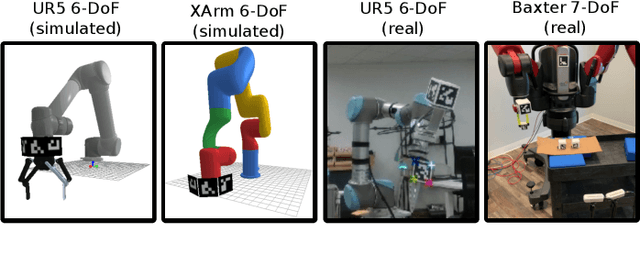
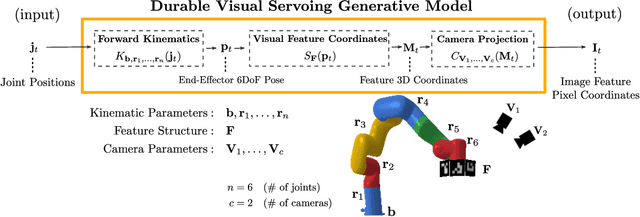
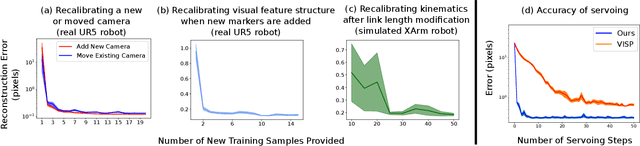
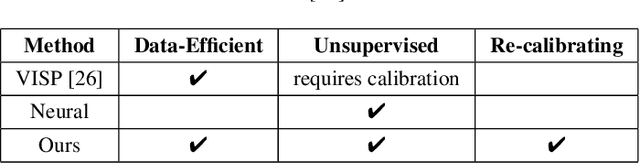
Visual servoing enables robotic systems to perform accurate closed-loop control, which is required in many applications. However, existing methods either require precise calibration of the robot kinematic model and cameras or use neural architectures that require large amounts of data to train. In this work, we present a method for unsupervised learning of visual servoing that does not require any prior calibration and is extremely data-efficient. Our key insight is that visual servoing does not depend on identifying the veridical kinematic and camera parameters, but instead only on an accurate generative model of image feature observations from the joint positions of the robot. We demonstrate that with our model architecture and learning algorithm, we can consistently learn accurate models from less than 50 training samples (which amounts to less than 1 min of unsupervised data collection), and that such data-efficient learning is not possible with standard neural architectures. Further, we show that by using the generative model in the loop and learning online, we can enable a robotic system to recover from calibration errors and to detect and quickly adapt to possibly unexpected changes in the robot-camera system (e.g. bumped camera, new objects).
3DP3: 3D Scene Perception via Probabilistic Programming
Oct 30, 2021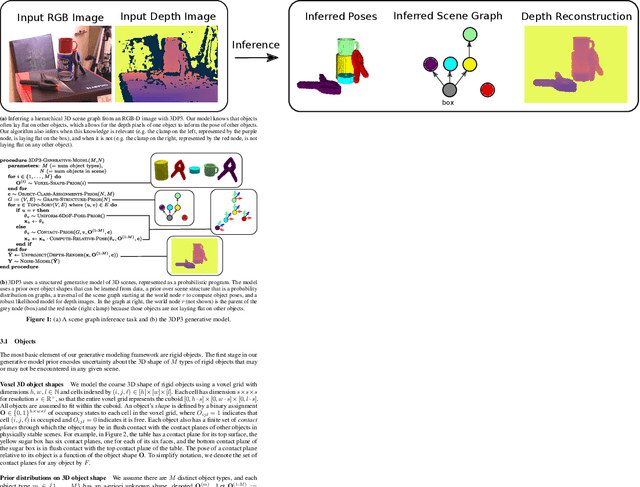
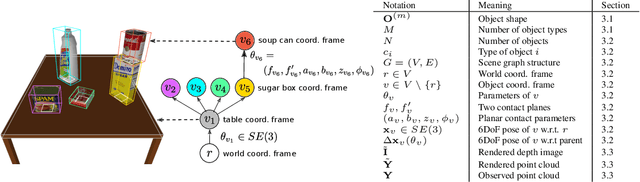
We present 3DP3, a framework for inverse graphics that uses inference in a structured generative model of objects, scenes, and images. 3DP3 uses (i) voxel models to represent the 3D shape of objects, (ii) hierarchical scene graphs to decompose scenes into objects and the contacts between them, and (iii) depth image likelihoods based on real-time graphics. Given an observed RGB-D image, 3DP3's inference algorithm infers the underlying latent 3D scene, including the object poses and a parsimonious joint parametrization of these poses, using fast bottom-up pose proposals, novel involutive MCMC updates of the scene graph structure, and, optionally, neural object detectors and pose estimators. We show that 3DP3 enables scene understanding that is aware of 3D shape, occlusion, and contact structure. Our results demonstrate that 3DP3 is more accurate at 6DoF object pose estimation from real images than deep learning baselines and shows better generalization to challenging scenes with novel viewpoints, contact, and partial observability.
Hierarchical Infinite Relational Model
Aug 16, 2021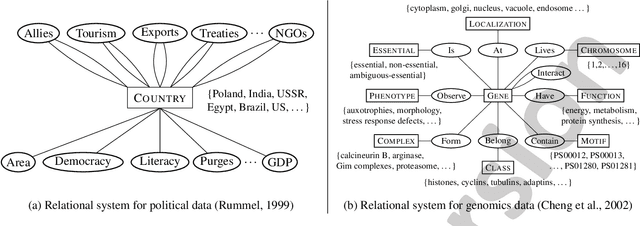
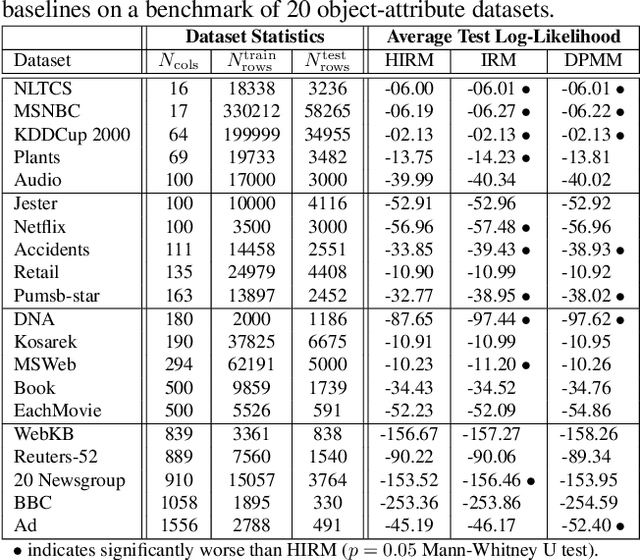
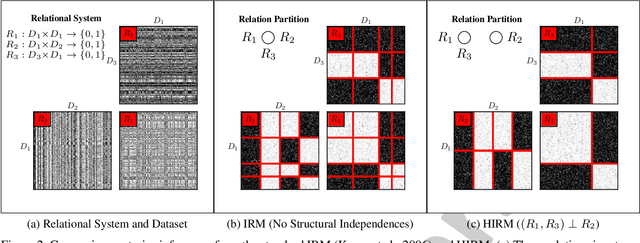
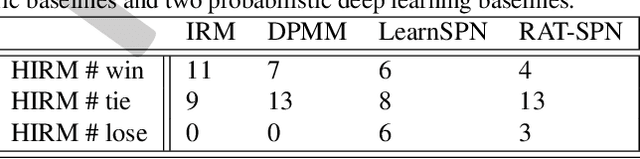
This paper describes the hierarchical infinite relational model (HIRM), a new probabilistic generative model for noisy, sparse, and heterogeneous relational data. Given a set of relations defined over a collection of domains, the model first infers multiple non-overlapping clusters of relations using a top-level Chinese restaurant process. Within each cluster of relations, a Dirichlet process mixture is then used to partition the domain entities and model the probability distribution of relation values. The HIRM generalizes the standard infinite relational model and can be used for a variety of data analysis tasks including dependence detection, clustering, and density estimation. We present new algorithms for fully Bayesian posterior inference via Gibbs sampling. We illustrate the efficacy of the method on a density estimation benchmark of twenty object-attribute datasets with up to 18 million cells and use it to discover relational structure in real-world datasets from politics and genomics.
Modeling the Mistakes of Boundedly Rational Agents Within a Bayesian Theory of Mind
Jun 24, 2021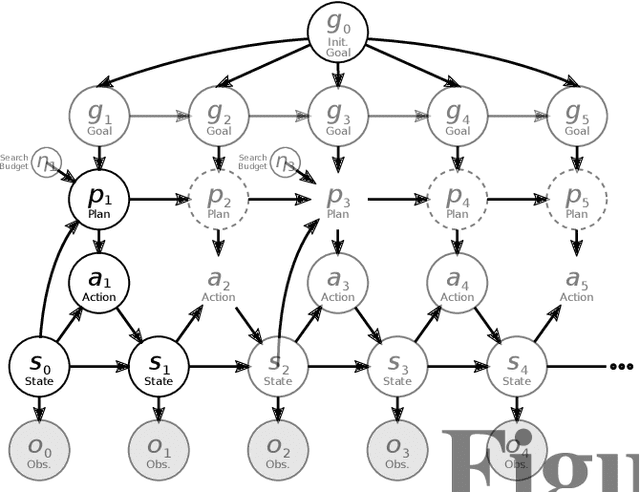
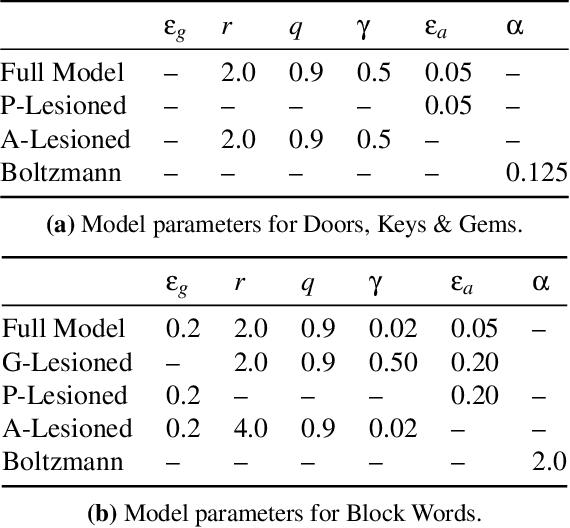
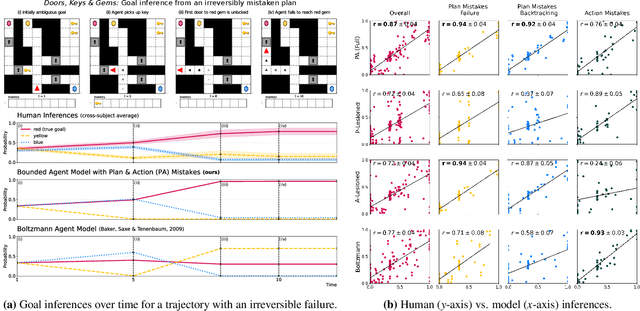
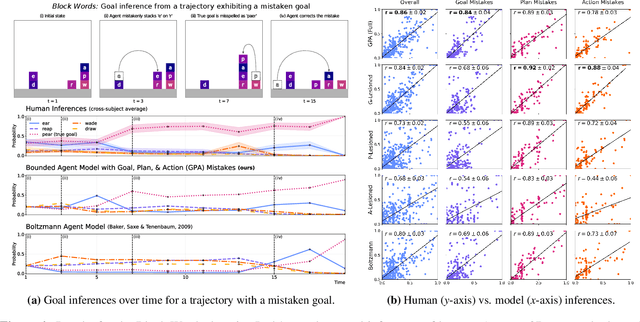
When inferring the goals that others are trying to achieve, people intuitively understand that others might make mistakes along the way. This is crucial for activities such as teaching, offering assistance, and deciding between blame or forgiveness. However, Bayesian models of theory of mind have generally not accounted for these mistakes, instead modeling agents as mostly optimal in achieving their goals. As a result, they are unable to explain phenomena like locking oneself out of one's house, or losing a game of chess. Here, we extend the Bayesian Theory of Mind framework to model boundedly rational agents who may have mistaken goals, plans, and actions. We formalize this by modeling agents as probabilistic programs, where goals may be confused with semantically similar states, plans may be misguided due to resource-bounded planning, and actions may be unintended due to execution errors. We present experiments eliciting human goal inferences in two domains: (i) a gridworld puzzle with gems locked behind doors, and (ii) a block-stacking domain. Our model better explains human inferences than alternatives, while generalizing across domains. These findings indicate the importance of modeling others as bounded agents, in order to account for the full richness of human intuitive psychology.
Exact Symbolic Inference in Probabilistic Programs via Sum-Product Representations
Oct 07, 2020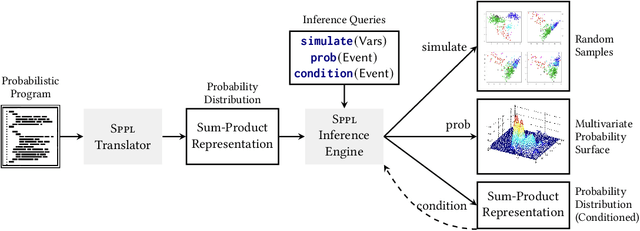
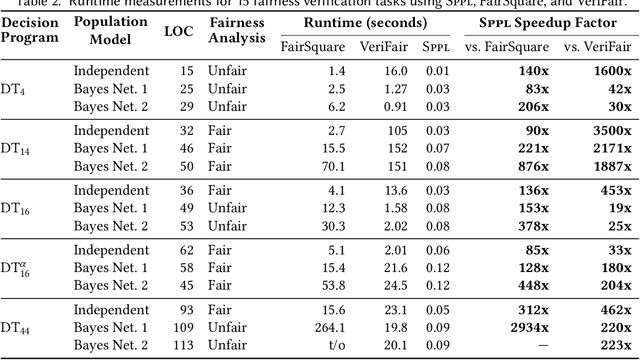
We present the Sum-Product Probabilistic Language (SPPL), a new system that automatically delivers exact solutions to a broad range of probabilistic inference queries. SPPL symbolically represents the full distribution on execution traces specified by a probabilistic program using a generalization of sum-product networks. SPPL handles continuous and discrete distributions, many-to-one numerical transformations, and a query language that includes general predicates on random variables. We formalize SPPL in terms of a novel translation strategy from probabilistic programs to a semantic domain of sum-product representations, present new algorithms for exactly conditioning on and computing probabilities of queries, and prove their soundness under the semantics. We present techniques for improving the scalability of translation and inference by automatically exploiting conditional independences and repeated structure in SPPL programs. We implement a prototype of SPPL with a modular architecture and evaluate it on a suite of common benchmarks, which establish that our system is up to 3500x faster than state-of-the-art systems for fairness verification; up to 1000x faster than state-of-the-art symbolic algebra techniques; and can compute exact probabilities of rare events in milliseconds.