 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Autonomous Control of a Magnetic Millirobot in In Vitro Cardiac Flow
Apr 02, 2026Untethered magnetic millirobots offer significant potential for minimally invasive cardiac therapies; however, achieving reliable autonomous control in pulsatile cardiac flow remains challenging. This work presents a vision-guided control framework enabling precise autonomous navigation of a magnetic millirobot in an in vitro heart phantom under physiologically relevant flow conditions. The system integrates UNet-based localization, A* path planning, and a sliding mode controller with a disturbance observer (SMC-DOB) designed for multi-coil electromagnetic actuation. Although drag forces are estimated using steady-state CFD simulations, the controller compensates for transient pulsatile disturbances during closed-loop operation. In static fluid, the SMC-DOB achieved sub-millimeter accuracy (root-mean-square error, RMSE = 0.49 mm), outperforming PID and MPC baselines. Under moderate pulsatile flow (7 cm/s peak, 20 cP), it reduced RMSE by 37% and peak error by 2.4$\times$ compared to PID. It further maintained RMSE below 2 mm (0.27 body lengths) under elevated pulsatile flow (10 cm/s peak, 20 cP) and under low-viscosity conditions (4.3 cP, 7 cm/s peak), where baseline controllers exhibited unstable or failed tracking. These results demonstrate robust closed-loop magnetic control under time-varying cardiac flow disturbances and support the feasibility of autonomous millirobot navigation for targeted drug delivery.
Task-Space Singularity Avoidance for Control Affine Systems Using Control Barrier Functions
Mar 24, 2026Singularities in robotic and dynamical systems arise when the mapping from control inputs to task-space motion loses rank, leading to an inability to determine inputs. This limits the system's ability to generate forces and torques in desired directions and prevents accurate trajectory tracking. This paper presents a control barrier function (CBF) framework for avoiding such singularities in control-affine systems. Singular configurations are identified through the eigenvalues of a state-dependent input-output mapping matrix, and barrier functions are constructed to maintain a safety margin from rank-deficient regions. Conditions for theoretical guarantees on safety are provided as a function of actuator dynamics. Simulations on a planar 2-link manipulator and a magnetically actuated needle demonstrate smooth trajectory tracking while avoiding singular configurations and reducing control input spikes by up to 100x compared to the nominal controller.
Fluoroscopy-Constrained Magnetic Robot Control via Zernike-Based Field Modeling and Nonlinear MPC
Feb 17, 2026Magnetic actuation enables surgical robots to navigate complex anatomical pathways while reducing tissue trauma and improving surgical precision. However, clinical deployment is limited by the challenges of controlling such systems under fluoroscopic imaging, which provides low frame rate and noisy pose feedback. This paper presents a control framework that remains accurate and stable under such conditions by combining a nonlinear model predictive control (NMPC) framework that directly outputs coil currents, an analytically differentiable magnetic field model based on Zernike polynomials, and a Kalman filter to estimate the robot state. Experimental validation is conducted with two magnetic robots in a 3D-printed fluid workspace and a spine phantom replicating drug delivery in the epidural space. Results show the proposed control method remains highly accurate when feedback is downsampled to 3 Hz with added Gaussian noise (sigma = 2 mm), mimicking clinical fluoroscopy. In the spine phantom experiments, the proposed method successfully executed a drug delivery trajectory with a root mean square (RMS) position error of 1.18 mm while maintaining safe clearance from critical anatomical boundaries.
Localization and Control of Magnetic Suture Needles in Cluttered Surgical Site with Blood and Tissue
May 20, 2021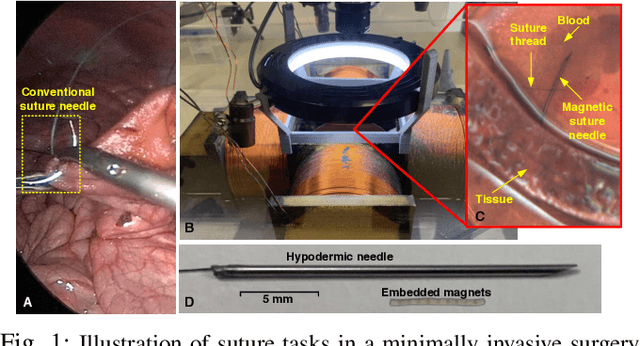
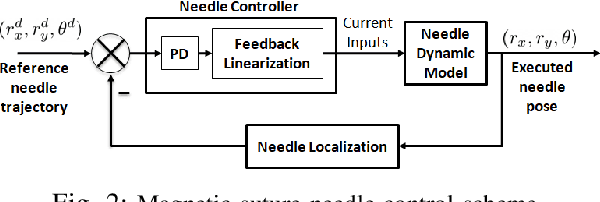
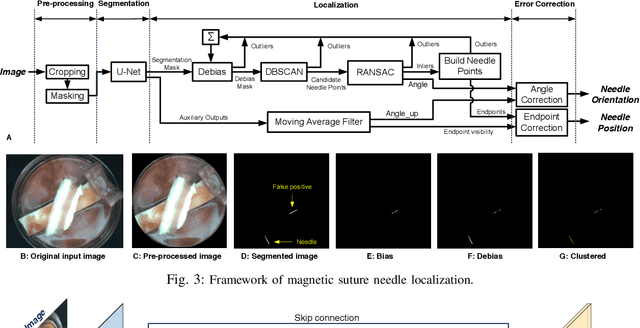
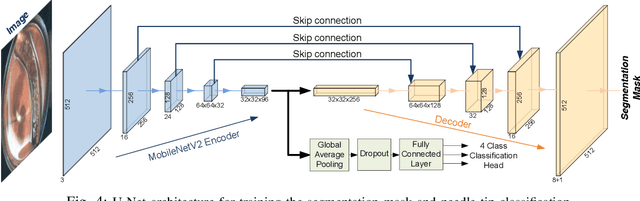
Real-time visual localization of needles is necessary for various surgical applications, including surgical automation and visual feedback. In this study we investigate localization and autonomous robotic control of needles in the context of our magneto-suturing system. Our system holds the potential for surgical manipulation with the benefit of minimal invasiveness and reduced patient side effects. However, the non-linear magnetic fields produce unintuitive forces and demand delicate position-based control that exceeds the capabilities of direct human manipulation. This makes automatic needle localization a necessity. Our localization method combines neural network-based segmentation and classical techniques, and we are able to consistently locate our needle with 0.73 mm RMS error in clean environments and 2.72 mm RMS error in challenging environments with blood and occlusion. The average localization RMS error is 2.16 mm for all environments we used in the experiments. We combine this localization method with our closed-loop feedback control system to demonstrate the further applicability of localization to autonomous control. Our needle is able to follow a running suture path in (1) no blood, no tissue; (2) heavy blood, no tissue; (3) no blood, with tissue; and (4) heavy blood, with tissue environments. The tip position tracking error ranges from 2.6 mm to 3.7 mm RMS, opening the door towards autonomous suturing tasks.