 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask-Space Singularity Avoidance for Control Affine Systems Using Control Barrier Functions
Mar 24, 2026Singularities in robotic and dynamical systems arise when the mapping from control inputs to task-space motion loses rank, leading to an inability to determine inputs. This limits the system's ability to generate forces and torques in desired directions and prevents accurate trajectory tracking. This paper presents a control barrier function (CBF) framework for avoiding such singularities in control-affine systems. Singular configurations are identified through the eigenvalues of a state-dependent input-output mapping matrix, and barrier functions are constructed to maintain a safety margin from rank-deficient regions. Conditions for theoretical guarantees on safety are provided as a function of actuator dynamics. Simulations on a planar 2-link manipulator and a magnetically actuated needle demonstrate smooth trajectory tracking while avoiding singular configurations and reducing control input spikes by up to 100x compared to the nominal controller.
Overcoming the Force Limitations of Magnetic Robotic Surgery: Impact-based Tetherless Suturing
Jul 03, 2021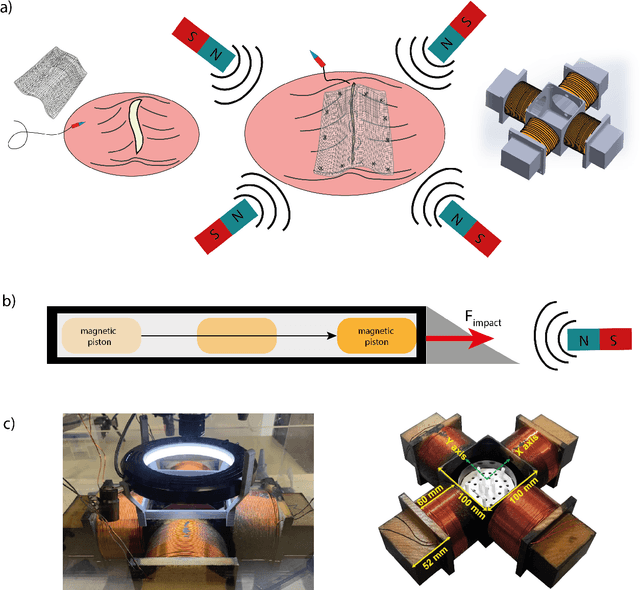
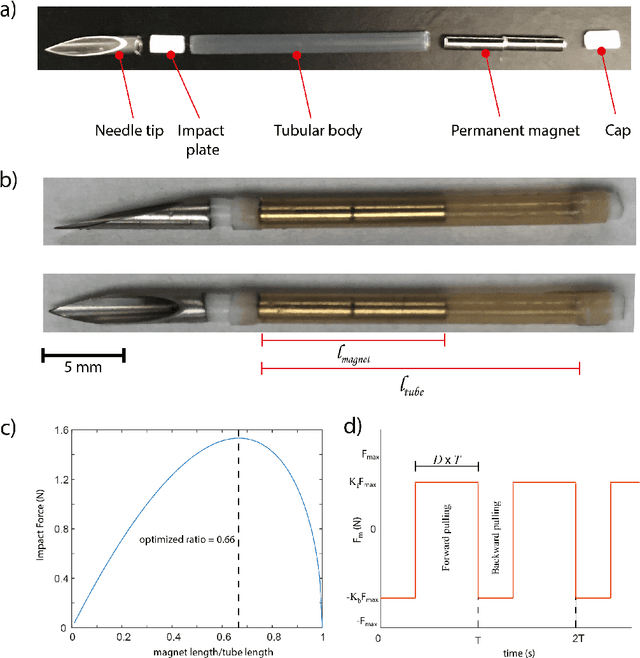
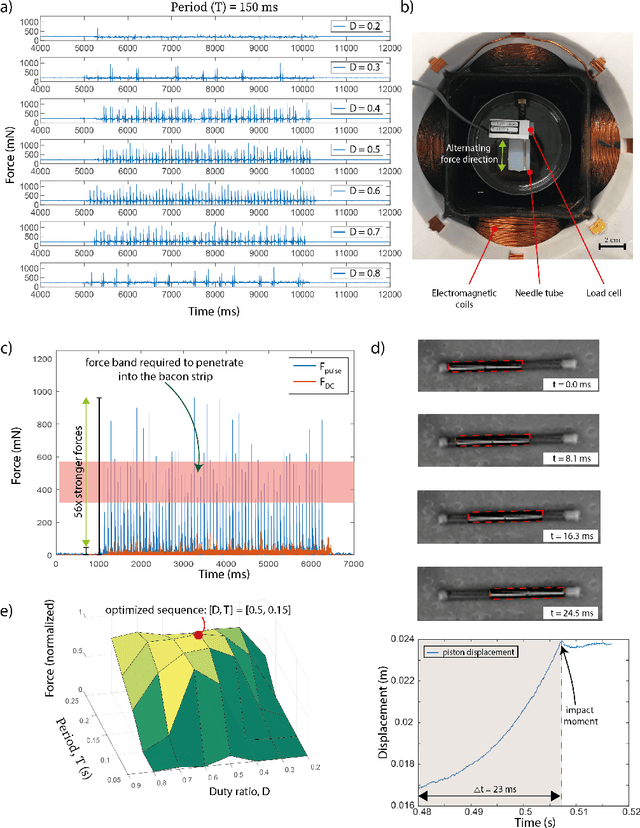
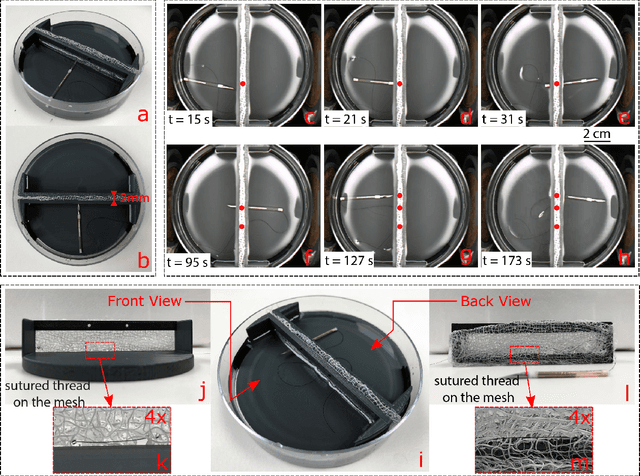
Magnetic robotics obviate the physical connections between the actuators and end effectors resulting in ultra-minimally invasive surgeries. Even though such a wireless actuation method is highly advantageous in medical applications, the trade-off between the applied force and miniature magnetic end effector dimensions has been one of the main challenges in practical applications in clinically relevant conditions. This trade-off is crucial for applications where in-tissue penetration is required (e.g., needle access, biopsy, and suturing). To increase the forces of such magnetic miniature end effectors to practically useful levels, we propose an impact-force-based suturing needle that is capable of penetrating into in-vitro and ex-vivo samples with 3-DoF planar freedom (planar positioning and in-plane orienting). The proposed optimized design is a custom-built 12 G needle that can generate 1.16 N penetration force which is 56 times stronger than its magnetic counterparts with the same size without such an impact force. By containing the fast-moving permanent magnet within the needle in a confined tubular structure, the movement of the overall needle remains slow and easily controllable. The achieved force is in the range of tissue penetration limits allowing the needle to be able to penetrate through tissues to follow a suturing method in a teleoperated fashion. We demonstrated in-vitro needle penetration into a bacon strip and successful suturing of a gauze mesh onto an agar gel mimicking a hernia repair procedure.
Localization and Control of Magnetic Suture Needles in Cluttered Surgical Site with Blood and Tissue
May 20, 2021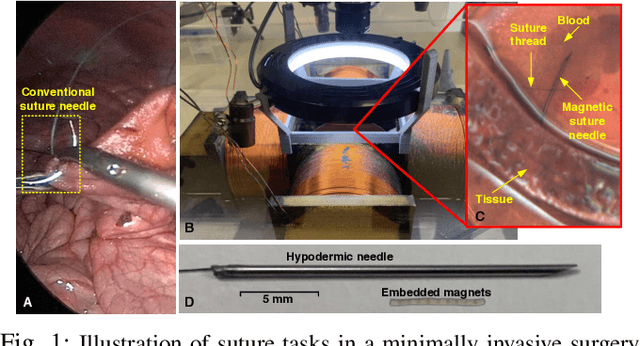
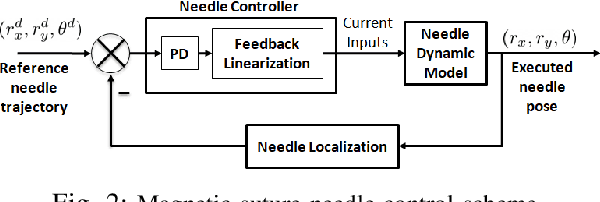
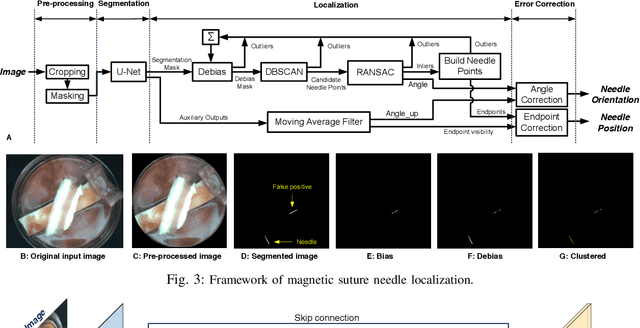
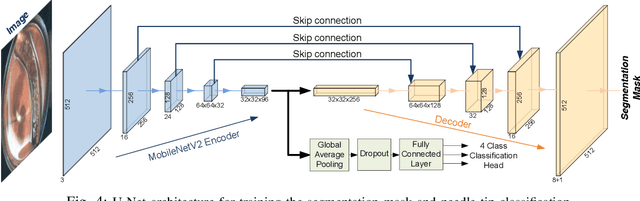
Real-time visual localization of needles is necessary for various surgical applications, including surgical automation and visual feedback. In this study we investigate localization and autonomous robotic control of needles in the context of our magneto-suturing system. Our system holds the potential for surgical manipulation with the benefit of minimal invasiveness and reduced patient side effects. However, the non-linear magnetic fields produce unintuitive forces and demand delicate position-based control that exceeds the capabilities of direct human manipulation. This makes automatic needle localization a necessity. Our localization method combines neural network-based segmentation and classical techniques, and we are able to consistently locate our needle with 0.73 mm RMS error in clean environments and 2.72 mm RMS error in challenging environments with blood and occlusion. The average localization RMS error is 2.16 mm for all environments we used in the experiments. We combine this localization method with our closed-loop feedback control system to demonstrate the further applicability of localization to autonomous control. Our needle is able to follow a running suture path in (1) no blood, no tissue; (2) heavy blood, no tissue; (3) no blood, with tissue; and (4) heavy blood, with tissue environments. The tip position tracking error ranges from 2.6 mm to 3.7 mm RMS, opening the door towards autonomous suturing tasks.