 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResurrecting Recurrent Neural Networks for Long Sequences
Mar 11, 2023



Recurrent Neural Networks (RNNs) offer fast inference on long sequences but are hard to optimize and slow to train. Deep state-space models (SSMs) have recently been shown to perform remarkably well on long sequence modeling tasks, and have the added benefits of fast parallelizable training and RNN-like fast inference. However, while SSMs are superficially similar to RNNs, there are important differences that make it unclear where their performance boost over RNNs comes from. In this paper, we show that careful design of deep RNNs using standard signal propagation arguments can recover the impressive performance of deep SSMs on long-range reasoning tasks, while also matching their training speed. To achieve this, we analyze and ablate a series of changes to standard RNNs including linearizing and diagonalizing the recurrence, using better parameterizations and initializations, and ensuring proper normalization of the forward pass. Our results provide new insights on the origins of the impressive performance of deep SSMs, while also introducing an RNN block called the Linear Recurrent Unit that matches both their performance on the Long Range Arena benchmark and their computational efficiency.
Differentially Private Diffusion Models Generate Useful Synthetic Images
Feb 27, 2023



The ability to generate privacy-preserving synthetic versions of sensitive image datasets could unlock numerous ML applications currently constrained by data availability. Due to their astonishing image generation quality, diffusion models are a prime candidate for generating high-quality synthetic data. However, recent studies have found that, by default, the outputs of some diffusion models do not preserve training data privacy. By privately fine-tuning ImageNet pre-trained diffusion models with more than 80M parameters, we obtain SOTA results on CIFAR-10 and Camelyon17 in terms of both FID and the accuracy of downstream classifiers trained on synthetic data. We decrease the SOTA FID on CIFAR-10 from 26.2 to 9.8, and increase the accuracy from 51.0% to 88.0%. On synthetic data from Camelyon17, we achieve a downstream accuracy of 91.1% which is close to the SOTA of 96.5% when training on the real data. We leverage the ability of generative models to create infinite amounts of data to maximise the downstream prediction performance, and further show how to use synthetic data for hyperparameter tuning. Our results demonstrate that diffusion models fine-tuned with differential privacy can produce useful and provably private synthetic data, even in applications with significant distribution shift between the pre-training and fine-tuning distributions.
Unlocking High-Accuracy Differentially Private Image Classification through Scale
Apr 28, 2022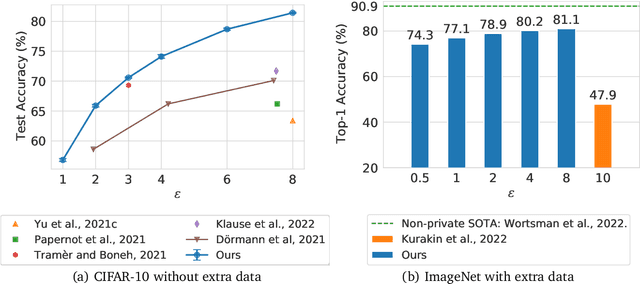
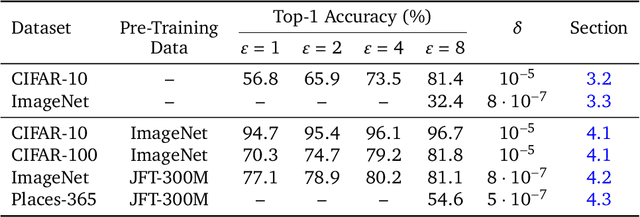

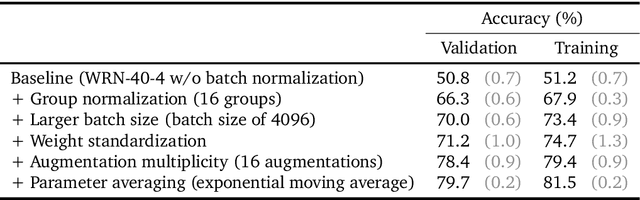
Differential Privacy (DP) provides a formal privacy guarantee preventing adversaries with access to a machine learning model from extracting information about individual training points. Differentially Private Stochastic Gradient Descent (DP-SGD), the most popular DP training method, realizes this protection by injecting noise during training. However previous works have found that DP-SGD often leads to a significant degradation in performance on standard image classification benchmarks. Furthermore, some authors have postulated that DP-SGD inherently performs poorly on large models, since the norm of the noise required to preserve privacy is proportional to the model dimension. In contrast, we demonstrate that DP-SGD on over-parameterized models can perform significantly better than previously thought. Combining careful hyper-parameter tuning with simple techniques to ensure signal propagation and improve the convergence rate, we obtain a new SOTA on CIFAR-10 of 81.4% under (8, 10^{-5})-DP using a 40-layer Wide-ResNet, improving over the previous SOTA of 71.7%. When fine-tuning a pre-trained 200-layer Normalizer-Free ResNet, we achieve a remarkable 77.1% top-1 accuracy on ImageNet under (1, 8*10^{-7})-DP, and achieve 81.1% under (8, 8*10^{-7})-DP. This markedly exceeds the previous SOTA of 47.9% under a larger privacy budget of (10, 10^{-6})-DP. We believe our results are a significant step towards closing the accuracy gap between private and non-private image classification.
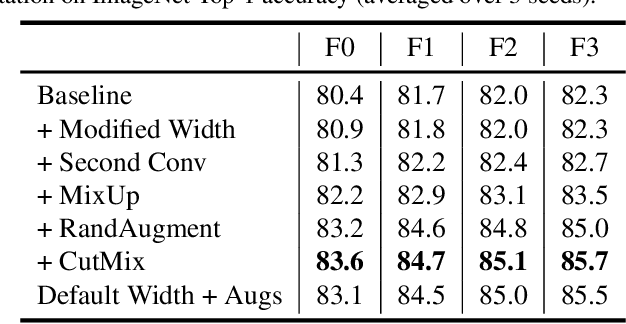
Regularising for invariance to data augmentation improves supervised learning
Mar 07, 2022
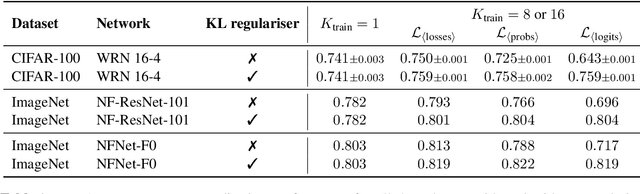
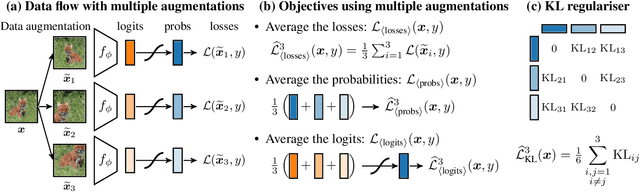
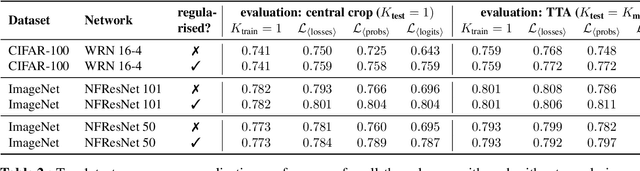
Data augmentation is used in machine learning to make the classifier invariant to label-preserving transformations. Usually this invariance is only encouraged implicitly by including a single augmented input during training. However, several works have recently shown that using multiple augmentations per input can improve generalisation or can be used to incorporate invariances more explicitly. In this work, we first empirically compare these recently proposed objectives that differ in whether they rely on explicit or implicit regularisation and at what level of the predictor they encode the invariances. We show that the predictions of the best performing method are also the most similar when compared on different augmentations of the same input. Inspired by this observation, we propose an explicit regulariser that encourages this invariance on the level of individual model predictions. Through extensive experiments on CIFAR-100 and ImageNet we show that this explicit regulariser (i) improves generalisation and (ii) equalises performance differences between all considered objectives. Our results suggest that objectives that encourage invariance on the level of the neural network itself generalise better than those that achieve invariance by averaging predictions of non-invariant models.
A study on the plasticity of neural networks
May 31, 2021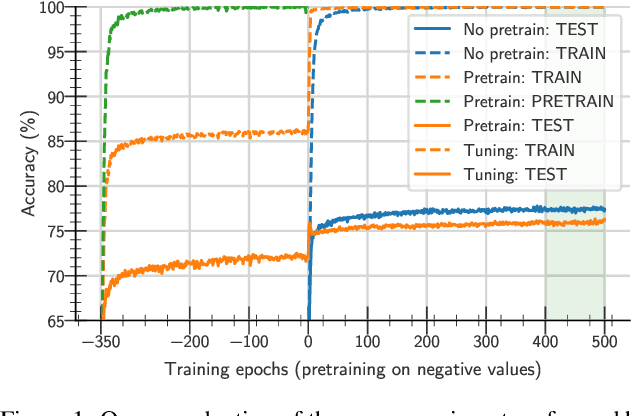
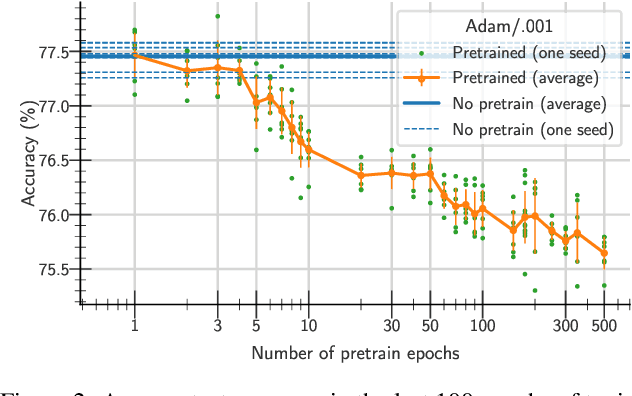
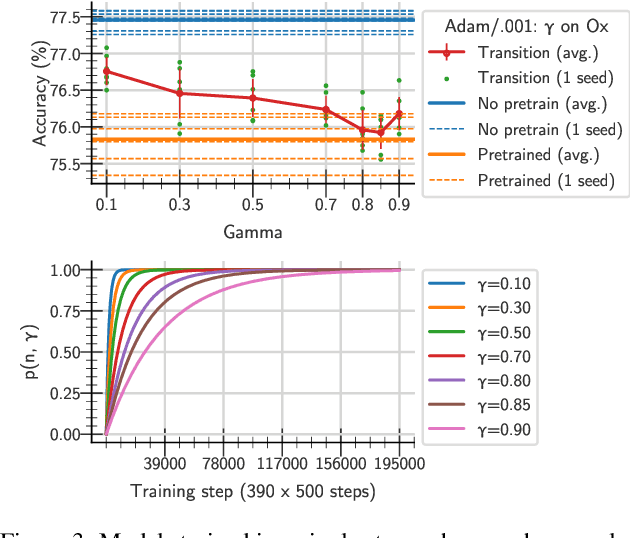
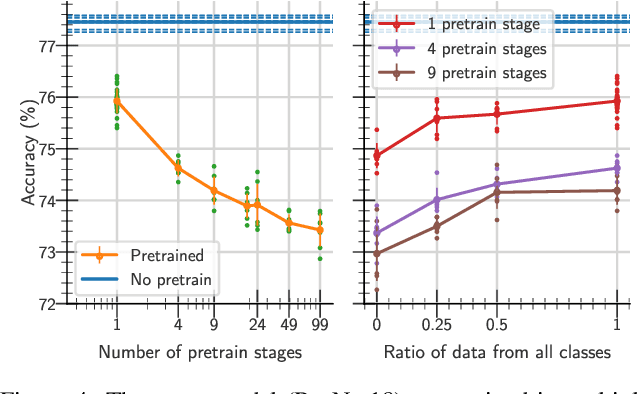
One aim shared by multiple settings, such as continual learning or transfer learning, is to leverage previously acquired knowledge to converge faster on the current task. Usually this is done through fine-tuning, where an implicit assumption is that the network maintains its plasticity, meaning that the performance it can reach on any given task is not affected negatively by previously seen tasks. It has been observed recently that a pretrained model on data from the same distribution as the one it is fine-tuned on might not reach the same generalisation as a freshly initialised one. We build and extend this observation, providing a hypothesis for the mechanics behind it. We discuss the implication of losing plasticity for continual learning which heavily relies on optimising pretrained models.
Drawing Multiple Augmentation Samples Per Image During Training Efficiently Decreases Test Error
May 27, 2021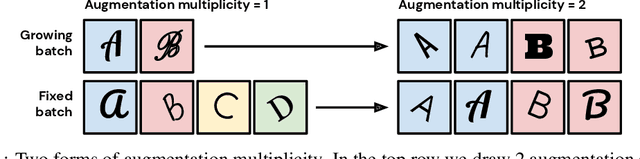

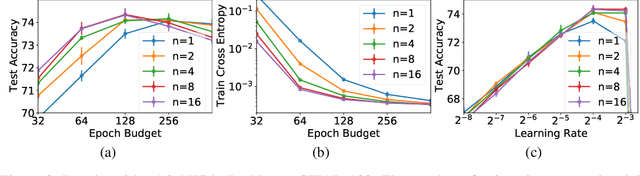

In computer vision, it is standard practice to draw a single sample from the data augmentation procedure for each unique image in the mini-batch, however it is not clear whether this choice is optimal for generalization. In this work, we provide a detailed empirical evaluation of how the number of augmentation samples per unique image influences performance on held out data. Remarkably, we find that drawing multiple samples per image consistently enhances the test accuracy achieved for both small and large batch training, despite reducing the number of unique training examples in each mini-batch. This benefit arises even when different augmentation multiplicities perform the same number of parameter updates and gradient evaluations. Our results suggest that, although the variance in the gradient estimate arising from subsampling the dataset has an implicit regularization benefit, the variance which arises from the data augmentation process harms test accuracy. By applying augmentation multiplicity to the recently proposed NFNet model family, we achieve a new ImageNet state of the art of 86.8$\%$ top-1 w/o extra data.
High-Performance Large-Scale Image Recognition Without Normalization
Feb 11, 2021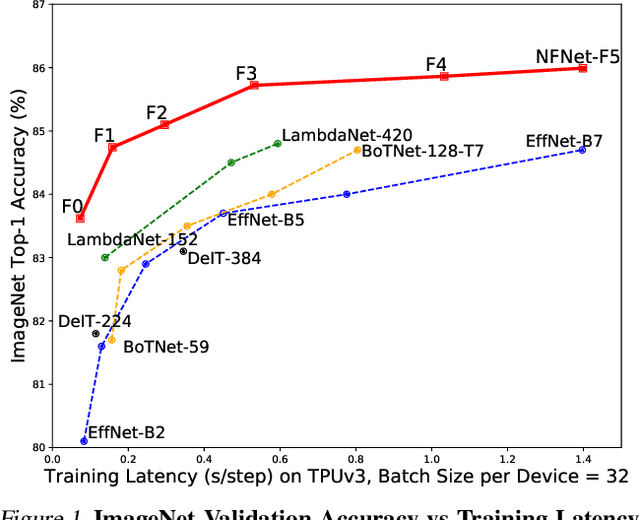
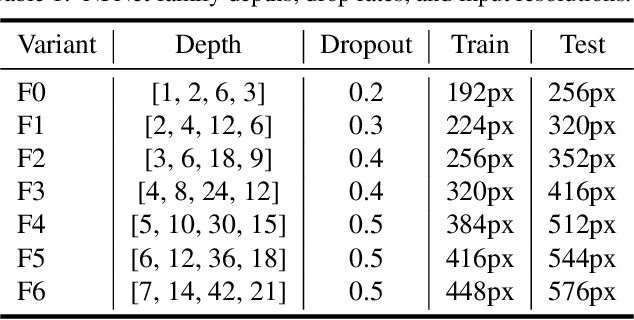
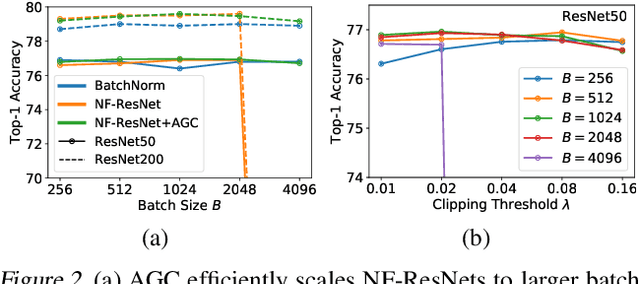
Batch normalization is a key component of most image classification models, but it has many undesirable properties stemming from its dependence on the batch size and interactions between examples. Although recent work has succeeded in training deep ResNets without normalization layers, these models do not match the test accuracies of the best batch-normalized networks, and are often unstable for large learning rates or strong data augmentations. In this work, we develop an adaptive gradient clipping technique which overcomes these instabilities, and design a significantly improved class of Normalizer-Free ResNets. Our smaller models match the test accuracy of an EfficientNet-B7 on ImageNet while being up to 8.7x faster to train, and our largest models attain a new state-of-the-art top-1 accuracy of 86.5%. In addition, Normalizer-Free models attain significantly better performance than their batch-normalized counterparts when finetuning on ImageNet after large-scale pre-training on a dataset of 300 million labeled images, with our best models obtaining an accuracy of 89.2%. Our code is available at https://github.com/deepmind/ deepmind-research/tree/master/nfnets
On the Origin of Implicit Regularization in Stochastic Gradient Descent
Jan 28, 2021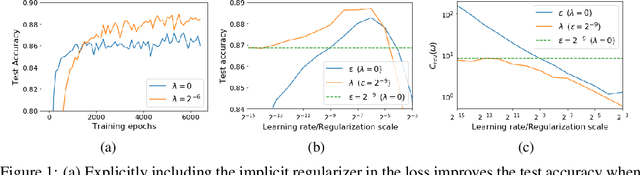
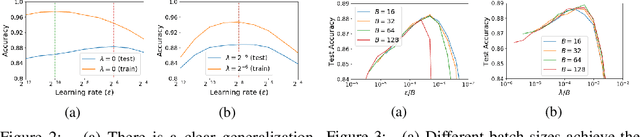
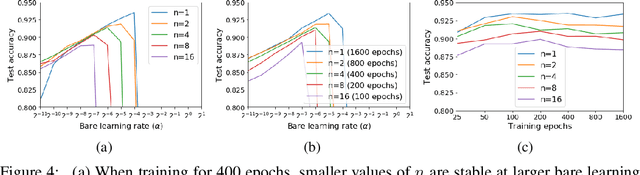
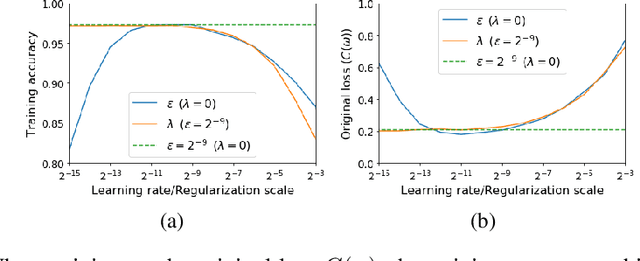
For infinitesimal learning rates, stochastic gradient descent (SGD) follows the path of gradient flow on the full batch loss function. However moderately large learning rates can achieve higher test accuracies, and this generalization benefit is not explained by convergence bounds, since the learning rate which maximizes test accuracy is often larger than the learning rate which minimizes training loss. To interpret this phenomenon we prove that for SGD with random shuffling, the mean SGD iterate also stays close to the path of gradient flow if the learning rate is small and finite, but on a modified loss. This modified loss is composed of the original loss function and an implicit regularizer, which penalizes the norms of the minibatch gradients. Under mild assumptions, when the batch size is small the scale of the implicit regularization term is proportional to the ratio of the learning rate to the batch size. We verify empirically that explicitly including the implicit regularizer in the loss can enhance the test accuracy when the learning rate is small.
Characterizing signal propagation to close the performance gap in unnormalized ResNets
Jan 27, 2021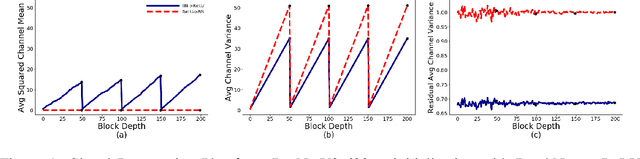

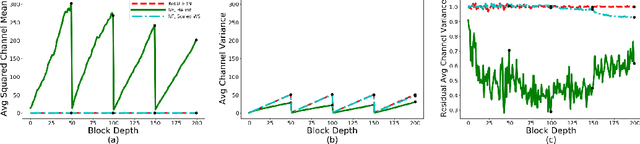

Batch Normalization is a key component in almost all state-of-the-art image classifiers, but it also introduces practical challenges: it breaks the independence between training examples within a batch, can incur compute and memory overhead, and often results in unexpected bugs. Building on recent theoretical analyses of deep ResNets at initialization, we propose a simple set of analysis tools to characterize signal propagation on the forward pass, and leverage these tools to design highly performant ResNets without activation normalization layers. Crucial to our success is an adapted version of the recently proposed Weight Standardization. Our analysis tools show how this technique preserves the signal in networks with ReLU or Swish activation functions by ensuring that the per-channel activation means do not grow with depth. Across a range of FLOP budgets, our networks attain performance competitive with the state-of-the-art EfficientNets on ImageNet.
BYOL works even without batch statistics
Oct 20, 2020

Bootstrap Your Own Latent (BYOL) is a self-supervised learning approach for image representation. From an augmented view of an image, BYOL trains an online network to predict a target network representation of a different augmented view of the same image. Unlike contrastive methods, BYOL does not explicitly use a repulsion term built from negative pairs in its training objective. Yet, it avoids collapse to a trivial, constant representation. Thus, it has recently been hypothesized that batch normalization (BN) is critical to prevent collapse in BYOL. Indeed, BN flows gradients across batch elements, and could leak information about negative views in the batch, which could act as an implicit negative (contrastive) term. However, we experimentally show that replacing BN with a batch-independent normalization scheme (namely, a combination of group normalization and weight standardization) achieves performance comparable to vanilla BYOL ($73.9\%$ vs. $74.3\%$ top-1 accuracy under the linear evaluation protocol on ImageNet with ResNet-$50$). Our finding disproves the hypothesis that the use of batch statistics is a crucial ingredient for BYOL to learn useful representations.