 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSolving adversarial examples requires solving exponential misalignment
Mar 03, 2026Adversarial attacks - input perturbations imperceptible to humans that fool neural networks - remain both a persistent failure mode in machine learning, and a phenomenon with mysterious origins. To shed light, we define and analyze a network's perceptual manifold (PM) for a class concept as the space of all inputs confidently assigned to that class by the network. We find, strikingly, that the dimensionalities of neural network PMs are orders of magnitude higher than those of natural human concepts. Since volume typically grows exponentially with dimension, this suggests exponential misalignment between machines and humans, with exponentially many inputs confidently assigned to concepts by machines but not humans. Furthermore, this provides a natural geometric hypothesis for the origin of adversarial examples: because a network's PM fills such a large region of input space, any input will be very close to any class concept's PM. Our hypothesis thus suggests that adversarial robustness cannot be attained without dimensional alignment of machine and human PMs, and therefore makes strong predictions: both robust accuracy and distance to any PM should be negatively correlated with the PM dimension. We confirmed these predictions across 18 different networks of varying robust accuracy. Crucially, we find even the most robust networks are still exponentially misaligned, and only the few PMs whose dimensionality approaches that of human concepts exhibit alignment to human perception. Our results connect the fields of alignment and adversarial examples, and suggest the curse of high dimensionality of machine PMs is a major impediment to adversarial robustness.
Representations of Text and Images Align From Layer One
Jan 12, 2026We show that for a variety of concepts in adapter-based vision-language models, the representations of their images and their text descriptions are meaningfully aligned from the very first layer. This contradicts the established view that such image-text alignment only appears in late layers. We show this using a new synthesis-based method inspired by DeepDream: given a textual concept such as "Jupiter", we extract its concept vector at a given layer, and then use optimisation to synthesise an image whose representation aligns with that vector. We apply our approach to hundreds of concepts across seven layers in Gemma 3, and find that the synthesised images often depict salient visual features of the targeted textual concepts: for example, already at layer 1, more than 50 % of images depict recognisable features of animals, activities, or seasons. Our method thus provides direct, constructive evidence of image-text alignment on a concept-by-concept and layer-by-layer basis. Unlike previous methods for measuring multimodal alignment, our approach is simple, fast, and does not require auxiliary models or datasets. It also offers a new path towards model interpretability, by providing a way to visualise a model's representation space by backtracing through its image processing components.
Direct Ascent Synthesis: Revealing Hidden Generative Capabilities in Discriminative Models
Feb 11, 2025



We demonstrate that discriminative models inherently contain powerful generative capabilities, challenging the fundamental distinction between discriminative and generative architectures. Our method, Direct Ascent Synthesis (DAS), reveals these latent capabilities through multi-resolution optimization of CLIP model representations. While traditional inversion attempts produce adversarial patterns, DAS achieves high-quality image synthesis by decomposing optimization across multiple spatial scales (1x1 to 224x224), requiring no additional training. This approach not only enables diverse applications -- from text-to-image generation to style transfer -- but maintains natural image statistics ($1/f^2$ spectrum) and guides the generation away from non-robust adversarial patterns. Our results demonstrate that standard discriminative models encode substantially richer generative knowledge than previously recognized, providing new perspectives on model interpretability and the relationship between adversarial examples and natural image synthesis.
A Note on Implementation Errors in Recent Adaptive Attacks Against Multi-Resolution Self-Ensembles
Jan 24, 2025

This note documents an implementation issue in recent adaptive attacks (Zhang et al. [2024]) against the multi-resolution self-ensemble defense (Fort and Lakshminarayanan [2024]). The implementation allowed adversarial perturbations to exceed the standard $L_\infty = 8/255$ bound by up to a factor of 20$\times$, reaching magnitudes of up to $L_\infty = 160/255$. When attacks are properly constrained within the intended bounds, the defense maintains non-trivial robustness. Beyond highlighting the importance of careful validation in adversarial machine learning research, our analysis reveals an intriguing finding: properly bounded adaptive attacks against strong multi-resolution self-ensembles often align with human perception, suggesting the need to reconsider how we measure adversarial robustness.
Ensemble everything everywhere: Multi-scale aggregation for adversarial robustness
Aug 08, 2024



Adversarial examples pose a significant challenge to the robustness, reliability and alignment of deep neural networks. We propose a novel, easy-to-use approach to achieving high-quality representations that lead to adversarial robustness through the use of multi-resolution input representations and dynamic self-ensembling of intermediate layer predictions. We demonstrate that intermediate layer predictions exhibit inherent robustness to adversarial attacks crafted to fool the full classifier, and propose a robust aggregation mechanism based on Vickrey auction that we call \textit{CrossMax} to dynamically ensemble them. By combining multi-resolution inputs and robust ensembling, we achieve significant adversarial robustness on CIFAR-10 and CIFAR-100 datasets without any adversarial training or extra data, reaching an adversarial accuracy of $\approx$72% (CIFAR-10) and $\approx$48% (CIFAR-100) on the RobustBench AutoAttack suite ($L_\infty=8/255)$ with a finetuned ImageNet-pretrained ResNet152. This represents a result comparable with the top three models on CIFAR-10 and a +5 % gain compared to the best current dedicated approach on CIFAR-100. Adding simple adversarial training on top, we get $\approx$78% on CIFAR-10 and $\approx$51% on CIFAR-100, improving SOTA by 5 % and 9 % respectively and seeing greater gains on the harder dataset. We validate our approach through extensive experiments and provide insights into the interplay between adversarial robustness, and the hierarchical nature of deep representations. We show that simple gradient-based attacks against our model lead to human-interpretable images of the target classes as well as interpretable image changes. As a byproduct, using our multi-resolution prior, we turn pre-trained classifiers and CLIP models into controllable image generators and develop successful transferable attacks on large vision language models.
Scaling Laws for Adversarial Attacks on Language Model Activations
Dec 05, 2023



We explore a class of adversarial attacks targeting the activations of language models. By manipulating a relatively small subset of model activations, $a$, we demonstrate the ability to control the exact prediction of a significant number (in some cases up to 1000) of subsequent tokens $t$. We empirically verify a scaling law where the maximum number of target tokens $t_\mathrm{max}$ predicted depends linearly on the number of tokens $a$ whose activations the attacker controls as $t_\mathrm{max} = \kappa a$. We find that the number of bits of control in the input space needed to control a single bit in the output space (what we call attack resistance $\chi$) is remarkably constant between $\approx 16$ and $\approx 25$ over 2 orders of magnitude of model sizes for different language models. Compared to attacks on tokens, attacks on activations are predictably much stronger, however, we identify a surprising regularity where one bit of input steered either via activations or via tokens is able to exert control over a similar amount of output bits. This gives support for the hypothesis that adversarial attacks are a consequence of dimensionality mismatch between the input and output spaces. A practical implication of the ease of attacking language model activations instead of tokens is for multi-modal and selected retrieval models, where additional data sources are added as activations directly, sidestepping the tokenized input. This opens up a new, broad attack surface. By using language models as a controllable test-bed to study adversarial attacks, we were able to experiment with input-output dimensions that are inaccessible in computer vision, especially where the output dimension dominates.
Multi-attacks: Many images $+$ the same adversarial attack $\to$ many target labels
Aug 04, 2023



We show that we can easily design a single adversarial perturbation $P$ that changes the class of $n$ images $X_1,X_2,\dots,X_n$ from their original, unperturbed classes $c_1, c_2,\dots,c_n$ to desired (not necessarily all the same) classes $c^*_1,c^*_2,\dots,c^*_n$ for up to hundreds of images and target classes at once. We call these \textit{multi-attacks}. Characterizing the maximum $n$ we can achieve under different conditions such as image resolution, we estimate the number of regions of high class confidence around a particular image in the space of pixels to be around $10^{\mathcal{O}(100)}$, posing a significant problem for exhaustive defense strategies. We show several immediate consequences of this: adversarial attacks that change the resulting class based on their intensity, and scale-independent adversarial examples. To demonstrate the redundancy and richness of class decision boundaries in the pixel space, we look for its two-dimensional sections that trace images and spell words using particular classes. We also show that ensembling reduces susceptibility to multi-attacks, and that classifiers trained on random labels are more susceptible. Our code is available on GitHub.
Constitutional AI: Harmlessness from AI Feedback
Dec 15, 2022



As AI systems become more capable, we would like to enlist their help to supervise other AIs. We experiment with methods for training a harmless AI assistant through self-improvement, without any human labels identifying harmful outputs. The only human oversight is provided through a list of rules or principles, and so we refer to the method as 'Constitutional AI'. The process involves both a supervised learning and a reinforcement learning phase. In the supervised phase we sample from an initial model, then generate self-critiques and revisions, and then finetune the original model on revised responses. In the RL phase, we sample from the finetuned model, use a model to evaluate which of the two samples is better, and then train a preference model from this dataset of AI preferences. We then train with RL using the preference model as the reward signal, i.e. we use 'RL from AI Feedback' (RLAIF). As a result we are able to train a harmless but non-evasive AI assistant that engages with harmful queries by explaining its objections to them. Both the SL and RL methods can leverage chain-of-thought style reasoning to improve the human-judged performance and transparency of AI decision making. These methods make it possible to control AI behavior more precisely and with far fewer human labels.
Measuring Progress on Scalable Oversight for Large Language Models
Nov 11, 2022


Developing safe and useful general-purpose AI systems will require us to make progress on scalable oversight: the problem of supervising systems that potentially outperform us on most skills relevant to the task at hand. Empirical work on this problem is not straightforward, since we do not yet have systems that broadly exceed our abilities. This paper discusses one of the major ways we think about this problem, with a focus on ways it can be studied empirically. We first present an experimental design centered on tasks for which human specialists succeed but unaided humans and current general AI systems fail. We then present a proof-of-concept experiment meant to demonstrate a key feature of this experimental design and show its viability with two question-answering tasks: MMLU and time-limited QuALITY. On these tasks, we find that human participants who interact with an unreliable large-language-model dialog assistant through chat -- a trivial baseline strategy for scalable oversight -- substantially outperform both the model alone and their own unaided performance. These results are an encouraging sign that scalable oversight will be tractable to study with present models and bolster recent findings that large language models can productively assist humans with difficult tasks.
What does a deep neural network confidently perceive? The effective dimension of high certainty class manifolds and their low confidence boundaries
Oct 11, 2022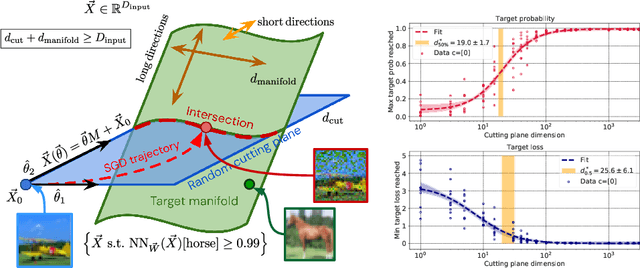
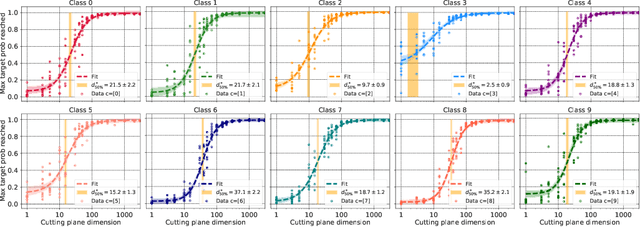
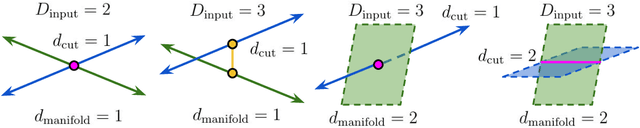
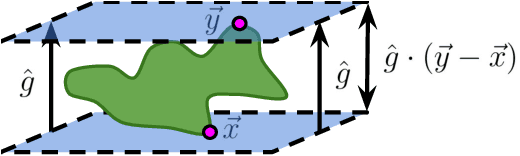
Deep neural network classifiers partition input space into high confidence regions for each class. The geometry of these class manifolds (CMs) is widely studied and intimately related to model performance; for example, the margin depends on CM boundaries. We exploit the notions of Gaussian width and Gordon's escape theorem to tractably estimate the effective dimension of CMs and their boundaries through tomographic intersections with random affine subspaces of varying dimension. We show several connections between the dimension of CMs, generalization, and robustness. In particular we investigate how CM dimension depends on 1) the dataset, 2) architecture (including ResNet, WideResNet \& Vision Transformer), 3) initialization, 4) stage of training, 5) class, 6) network width, 7) ensemble size, 8) label randomization, 9) training set size, and 10) robustness to data corruption. Together a picture emerges that higher performing and more robust models have higher dimensional CMs. Moreover, we offer a new perspective on ensembling via intersections of CMs. Our code is at https://github.com/stanislavfort/slice-dice-optimize/