 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeASAGA: Asynchronous Parallel SAGA
Nov 08, 2017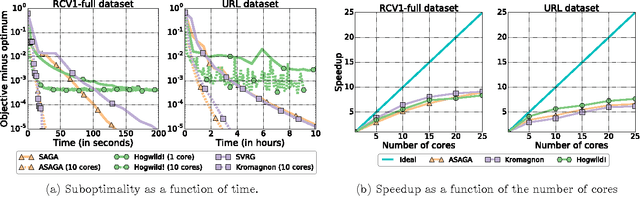
We describe ASAGA, an asynchronous parallel version of the incremental gradient algorithm SAGA that enjoys fast linear convergence rates. Through a novel perspective, we revisit and clarify a subtle but important technical issue present in a large fraction of the recent convergence rate proofs for asynchronous parallel optimization algorithms, and propose a simplification of the recently introduced "perturbed iterate" framework that resolves it. We thereby prove that ASAGA can obtain a theoretical linear speedup on multi-core systems even without sparsity assumptions. We present results of an implementation on a 40-core architecture illustrating the practical speedup as well as the hardware overhead.
Breaking the Nonsmooth Barrier: A Scalable Parallel Method for Composite Optimization
Nov 05, 2017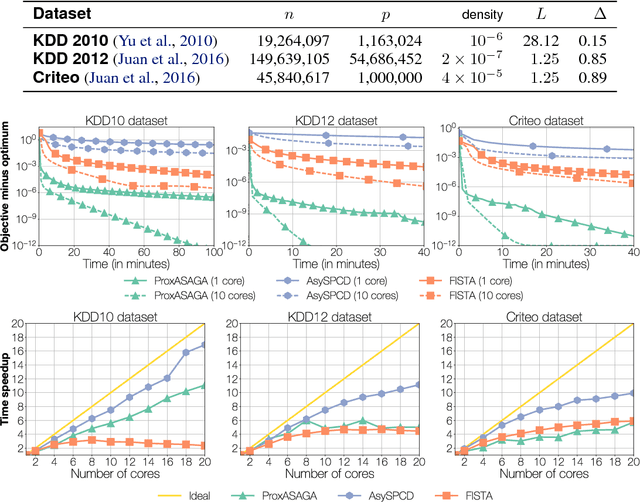
Due to their simplicity and excellent performance, parallel asynchronous variants of stochastic gradient descent have become popular methods to solve a wide range of large-scale optimization problems on multi-core architectures. Yet, despite their practical success, support for nonsmooth objectives is still lacking, making them unsuitable for many problems of interest in machine learning, such as the Lasso, group Lasso or empirical risk minimization with convex constraints. In this work, we propose and analyze ProxASAGA, a fully asynchronous sparse method inspired by SAGA, a variance reduced incremental gradient algorithm. The proposed method is easy to implement and significantly outperforms the state of the art on several nonsmooth, large-scale problems. We prove that our method achieves a theoretical linear speedup with respect to the sequential version under assumptions on the sparsity of gradients and block-separability of the proximal term. Empirical benchmarks on a multi-core architecture illustrate practical speedups of up to 12x on a 20-core machine.
* Appears in Advances in Neural Information Processing Systems 30 (NIPS 2017), 28 pages
Joint Discovery of Object States and Manipulation Actions
Aug 28, 2017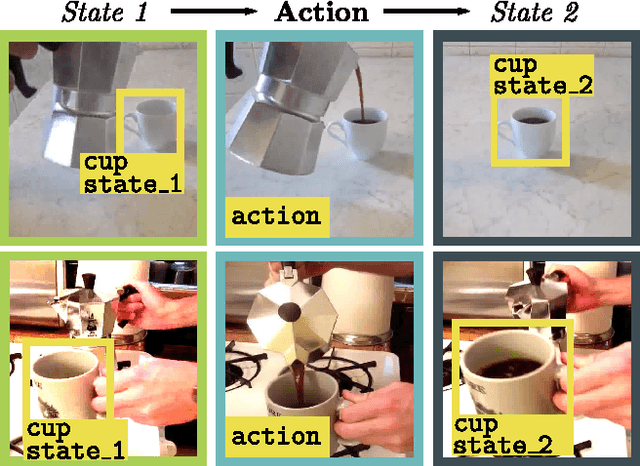
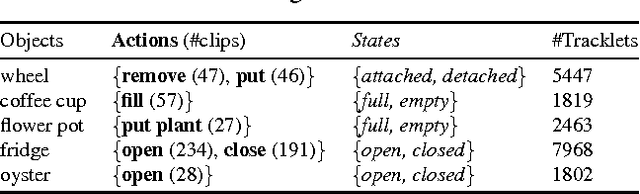
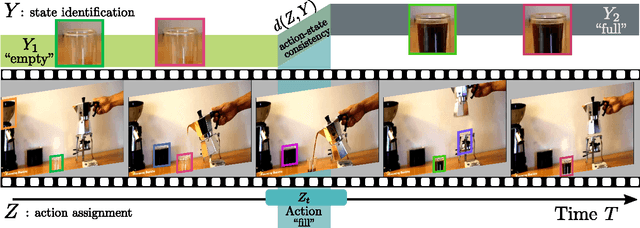
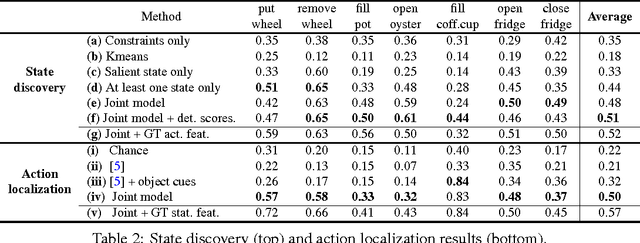
Many human activities involve object manipulations aiming to modify the object state. Examples of common state changes include full/empty bottle, open/closed door, and attached/detached car wheel. In this work, we seek to automatically discover the states of objects and the associated manipulation actions. Given a set of videos for a particular task, we propose a joint model that learns to identify object states and to localize state-modifying actions. Our model is formulated as a discriminative clustering cost with constraints. We assume a consistent temporal order for the changes in object states and manipulation actions, and introduce new optimization techniques to learn model parameters without additional supervision. We demonstrate successful discovery of seven manipulation actions and corresponding object states on a new dataset of videos depicting real-life object manipulations. We show that our joint formulation results in an improvement of object state discovery by action recognition and vice versa.
A Closer Look at Memorization in Deep Networks
Jul 01, 2017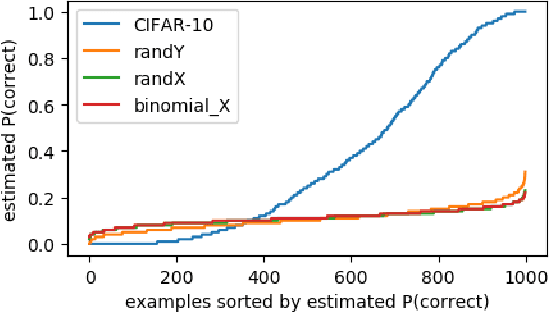
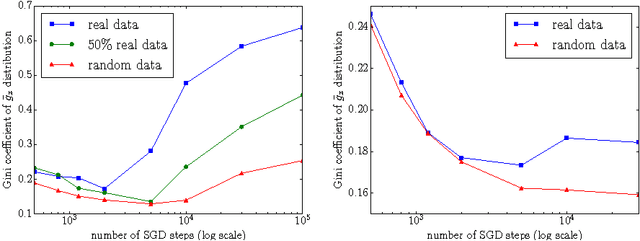
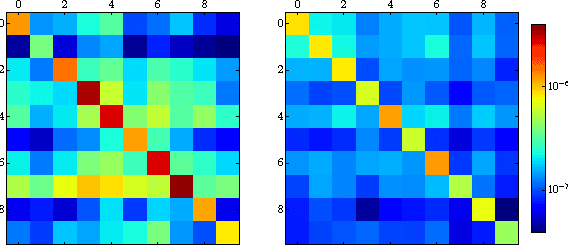
We examine the role of memorization in deep learning, drawing connections to capacity, generalization, and adversarial robustness. While deep networks are capable of memorizing noise data, our results suggest that they tend to prioritize learning simple patterns first. In our experiments, we expose qualitative differences in gradient-based optimization of deep neural networks (DNNs) on noise vs. real data. We also demonstrate that for appropriately tuned explicit regularization (e.g., dropout) we can degrade DNN training performance on noise datasets without compromising generalization on real data. Our analysis suggests that the notions of effective capacity which are dataset independent are unlikely to explain the generalization performance of deep networks when trained with gradient based methods because training data itself plays an important role in determining the degree of memorization.
Frank-Wolfe Algorithms for Saddle Point Problems
Mar 03, 2017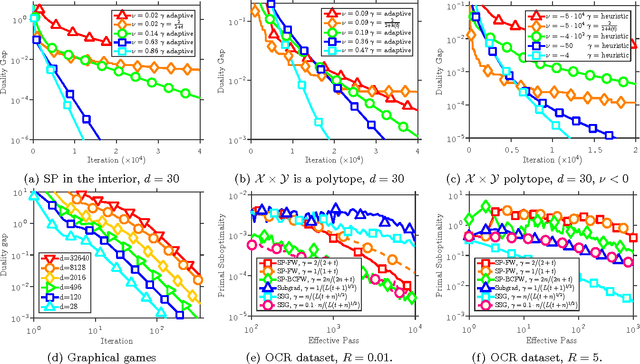
We extend the Frank-Wolfe (FW) optimization algorithm to solve constrained smooth convex-concave saddle point (SP) problems. Remarkably, the method only requires access to linear minimization oracles. Leveraging recent advances in FW optimization, we provide the first proof of convergence of a FW-type saddle point solver over polytopes, thereby partially answering a 30 year-old conjecture. We also survey other convergence results and highlight gaps in the theoretical underpinnings of FW-style algorithms. Motivating applications without known efficient alternatives are explored through structured prediction with combinatorial penalties as well as games over matching polytopes involving an exponential number of constraints.
PAC-Bayesian Theory Meets Bayesian Inference
Feb 13, 2017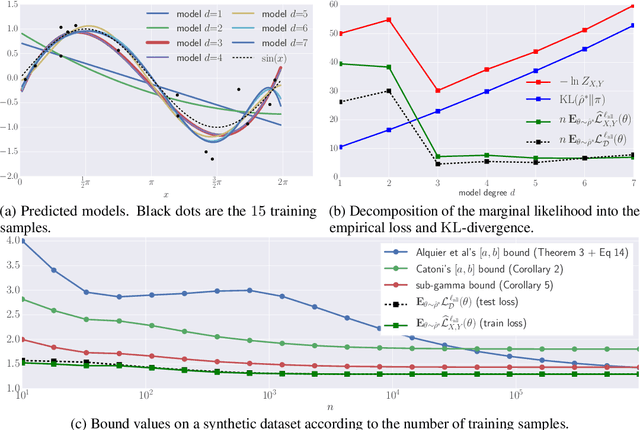
We exhibit a strong link between frequentist PAC-Bayesian risk bounds and the Bayesian marginal likelihood. That is, for the negative log-likelihood loss function, we show that the minimization of PAC-Bayesian generalization risk bounds maximizes the Bayesian marginal likelihood. This provides an alternative explanation to the Bayesian Occam's razor criteria, under the assumption that the data is generated by an i.i.d distribution. Moreover, as the negative log-likelihood is an unbounded loss function, we motivate and propose a PAC-Bayesian theorem tailored for the sub-gamma loss family, and we show that our approach is sound on classical Bayesian linear regression tasks.
* Published at NIPS 2015 (http://papers.nips.cc/paper/6569-pac-bayesian-theory-meets-bayesian-inference)
Convergence Rate of Frank-Wolfe for Non-Convex Objectives
Jul 01, 2016We give a simple proof that the Frank-Wolfe algorithm obtains a stationary point at a rate of $O(1/\sqrt{t})$ on non-convex objectives with a Lipschitz continuous gradient. Our analysis is affine invariant and is the first, to the best of our knowledge, giving a similar rate to what was already proven for projected gradient methods (though on slightly different measures of stationarity).
Unsupervised Learning from Narrated Instruction Videos
Jun 28, 2016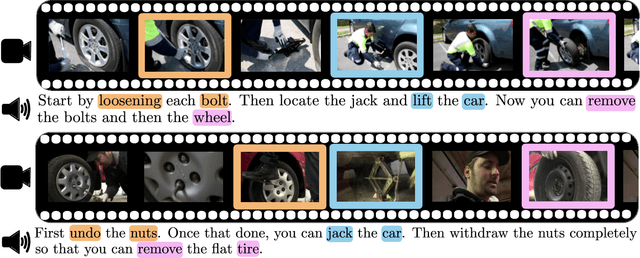
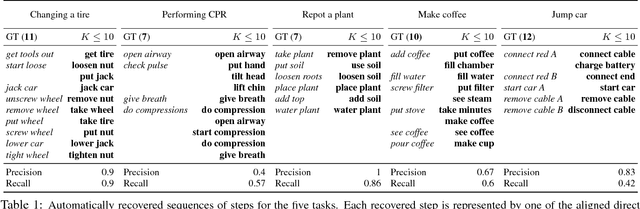

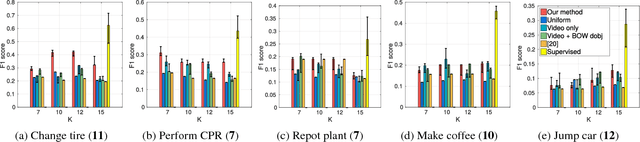
We address the problem of automatically learning the main steps to complete a certain task, such as changing a car tire, from a set of narrated instruction videos. The contributions of this paper are three-fold. First, we develop a new unsupervised learning approach that takes advantage of the complementary nature of the input video and the associated narration. The method solves two clustering problems, one in text and one in video, applied one after each other and linked by joint constraints to obtain a single coherent sequence of steps in both modalities. Second, we collect and annotate a new challenging dataset of real-world instruction videos from the Internet. The dataset contains about 800,000 frames for five different tasks that include complex interactions between people and objects, and are captured in a variety of indoor and outdoor settings. Third, we experimentally demonstrate that the proposed method can automatically discover, in an unsupervised manner, the main steps to achieve the task and locate the steps in the input videos.
Beyond CCA: Moment Matching for Multi-View Models
Jun 03, 2016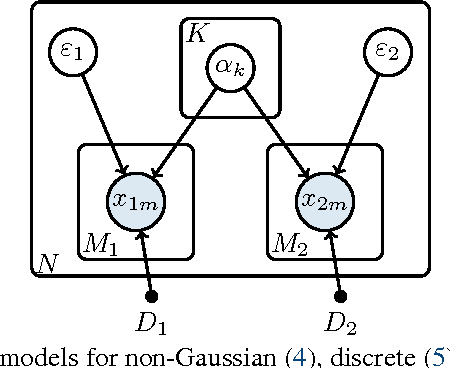
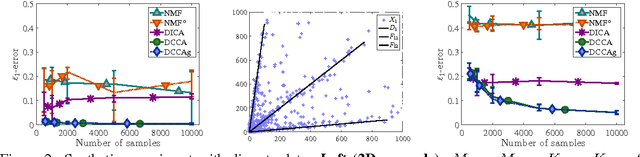
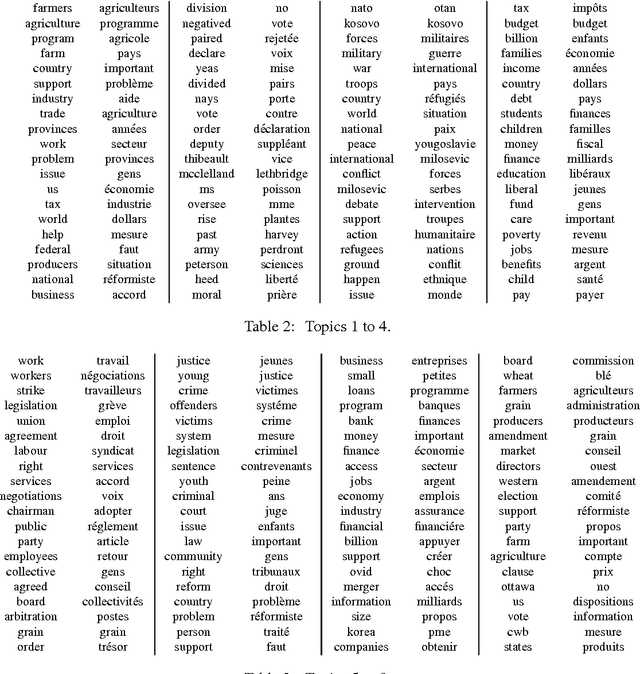
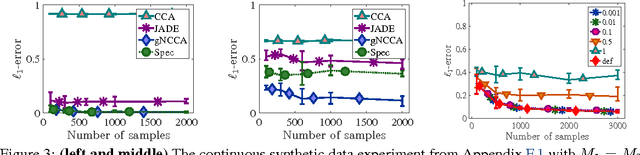
We introduce three novel semi-parametric extensions of probabilistic canonical correlation analysis with identifiability guarantees. We consider moment matching techniques for estimation in these models. For that, by drawing explicit links between the new models and a discrete version of independent component analysis (DICA), we first extend the DICA cumulant tensors to the new discrete version of CCA. By further using a close connection with independent component analysis, we introduce generalized covariance matrices, which can replace the cumulant tensors in the moment matching framework, and, therefore, improve sample complexity and simplify derivations and algorithms significantly. As the tensor power method or orthogonal joint diagonalization are not applicable in the new setting, we use non-orthogonal joint diagonalization techniques for matching the cumulants. We demonstrate performance of the proposed models and estimation techniques on experiments with both synthetic and real datasets.
Minding the Gaps for Block Frank-Wolfe Optimization of Structured SVMs
May 30, 2016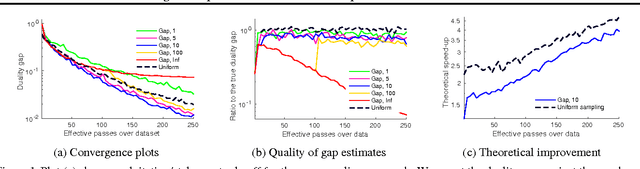
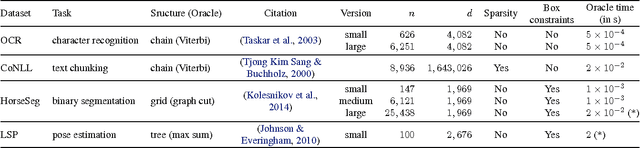
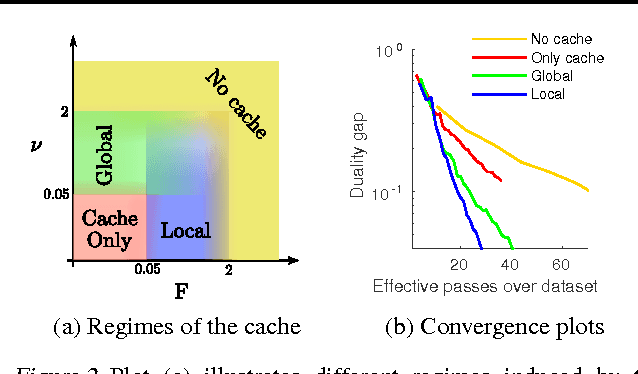
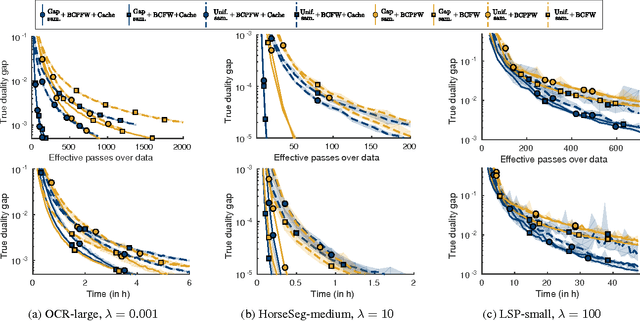
In this paper, we propose several improvements on the block-coordinate Frank-Wolfe (BCFW) algorithm from Lacoste-Julien et al. (2013) recently used to optimize the structured support vector machine (SSVM) objective in the context of structured prediction, though it has wider applications. The key intuition behind our improvements is that the estimates of block gaps maintained by BCFW reveal the block suboptimality that can be used as an adaptive criterion. First, we sample objects at each iteration of BCFW in an adaptive non-uniform way via gapbased sampling. Second, we incorporate pairwise and away-step variants of Frank-Wolfe into the block-coordinate setting. Third, we cache oracle calls with a cache-hit criterion based on the block gaps. Fourth, we provide the first method to compute an approximate regularization path for SSVM. Finally, we provide an exhaustive empirical evaluation of all our methods on four structured prediction datasets.